Coupled Routing and Configuration Optimization for Multi-Viewpoint Robotic Inspection
Pith reviewed 2026-06-26 21:00 UTC · model grok-4.3
The pith
Jointly optimizing both visiting order and per-viewpoint robot configurations in one global search produces time-optimal inspection routes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A single global CMA-ES search over random-key tour encodings and per-viewpoint configuration parameters, using a closed-form self-motion manifold parameterization and an admissible double-integrator travel-time surrogate, followed by direct-collocation verification on the selected edges, yields a collision-free, dynamically feasible, time-optimal route for a 9-DoF robot visiting a given set of 6-DoF inspection viewpoints.
What carries the argument
Random-key encoded tour together with per-viewpoint configuration variables, searched globally by CMA-ES with a double-integrator surrogate for travel times and closed-form self-motion manifold parameterization.
If this is right
- Trajectory optimization is required only for the final route edges rather than for every pair of viewpoints.
- Global time-optimality becomes reachable without the decoupling between configuration choice and routing that modular pipelines enforce.
- The selected route satisfies collision avoidance, dynamic feasibility, and torque limits after the final verification step.
- End-to-end inspection time is reduced relative to both modular pipelines and naive distance-based baselines on 9-DoF systems.
Where Pith is reading between the lines
- The linear scaling of trajectory solves could make the approach practical for inspection problems with dozens of viewpoints where quadratic methods become prohibitive.
- The same joint-order-and-configuration idea might transfer to other multi-pose robotic tasks such as welding sequences or surface finishing where configuration choice affects travel cost.
- If the surrogate error can be bounded more tightly, the method could incorporate uncertainty estimates to produce routes that remain near-optimal under model mismatch.
Load-bearing premise
The closed-form double-integrator surrogate for rest-to-rest travel time remains accurate enough that the CMA-ES search locates the true time-optimal route.
What would settle it
For a small set of viewpoints, compute the true minimum total time by exhaustive enumeration of orders and configurations using exact trajectory optimization on every pair; if the surrogate-based CMA-ES route yields a substantially higher time, the approximation claim is false.
Figures
read the original abstract
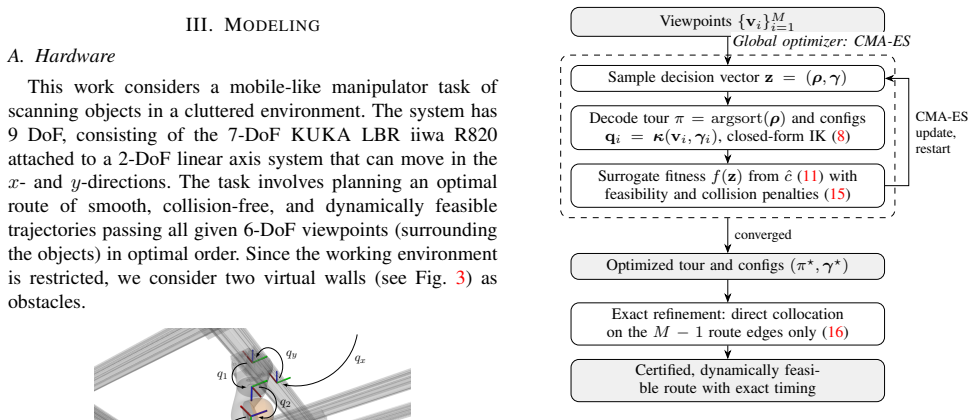
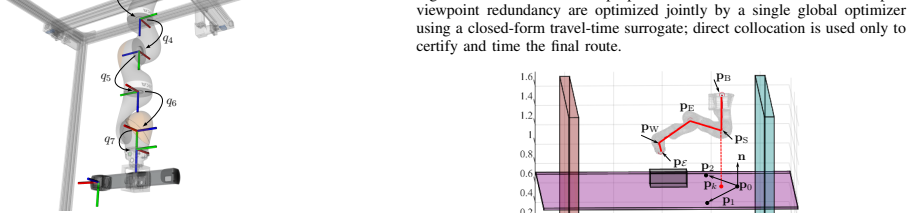
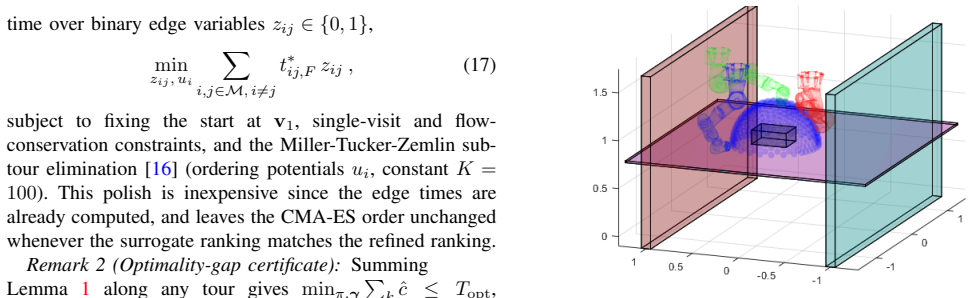
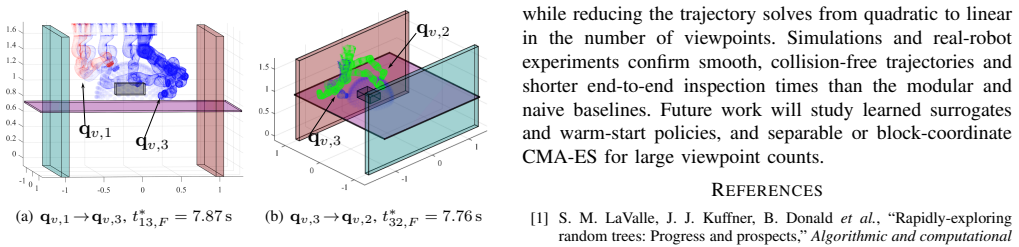
We present a unified framework that turns a set of 6-DoF inspection viewpoints into a time-optimal, collision-free route for a 9-DoF robotic system. Unlike modular pipelines that fix a single inverse-kinematics (IK) configuration per viewpoint, build an all-pairs travel-time map, and then route, our method jointly optimizes the visiting order and the per-viewpoint configuration in a single global search. The three-dimensional self-motion manifold of each viewpoint is parameterized in closed form so that the pose constraint holds by construction, the rest-to-rest travel time is approximated by a closed-form admissible double-integrator surrogate, and the tour is encoded by random keys. A derivative-free optimizer (CMA-ES) minimizes a cheap penalized objective over order and configuration, after which direct-collocation trajectory optimization is applied only to the edges of the selected route to certify dynamic feasibility and torque limits, and to return exact timings. This reduces the trajectory solves from quadratic to linear in the number of viewpoints and removes the decoupling that prevents modular pipelines from being globally time-optimal. Simulations and real-robot experiments on a KUKA LBR iiwa with a 2-DoF linear stage validate feasibility, smooth execution, and reduced end-to-end inspection time relative to modular and naive distance-based baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a unified framework for time-optimal, collision-free routing of a 9-DoF robotic inspection system (KUKA LBR iiwa + 2-DoF stage). It jointly optimizes visiting order and per-viewpoint configurations via CMA-ES on a closed-form admissible double-integrator surrogate for rest-to-rest travel times (with random-key tour encoding and closed-form self-motion manifold parameterization), followed by direct-collocation refinement only on the selected route's edges to enforce dynamics and torque limits. This is claimed to reduce trajectory solves from quadratic to linear in the number of viewpoints while removing the sub-optimality of decoupled modular pipelines.
Significance. If the surrogate is shown to reliably identify the true time-optimal route, the method would offer a practical advance in coupled routing-configuration optimization for high-DoF systems, with the linear scaling of expensive trajectory solves and the hardware validation on KUKA providing concrete efficiency and feasibility evidence.
major comments (2)
- [Abstract] Abstract (paragraph on surrogate): The central claim that minimizing the admissible double-integrator surrogate over order+configuration yields the globally time-optimal route under true 9-DoF dynamics requires that surrogate errors are sufficiently uniform or rank-preserving across candidate tours; the manuscript provides no quantitative correlation study, rank-preservation test, or counter-example check between surrogate and true times to support this.
- [Abstract] Abstract (validation paragraph): The reported simulations and KUKA experiments validate feasibility and reduced end-to-end time relative to baselines, but do not include an ablation or comparison that isolates whether the joint surrogate search recovers a route whose true time is strictly better than what a decoupled pipeline would have found.
Simulated Author's Rebuttal
We thank the referee for their insightful comments, which help strengthen the validation of our surrogate-based optimization approach. We agree that additional quantitative analysis is needed to support the claims regarding the surrogate's rank preservation and the superiority of the joint optimization. We will incorporate the suggested studies in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on surrogate): The central claim that minimizing the admissible double-integrator surrogate over order+configuration yields the globally time-optimal route under true 9-DoF dynamics requires that surrogate errors are sufficiently uniform or rank-preserving across candidate tours; the manuscript provides no quantitative correlation study, rank-preservation test, or counter-example check between surrogate and true times to support this.
Authors: We acknowledge the absence of a quantitative study correlating the surrogate times with the true trajectory optimization times. In the revised manuscript, we will add an analysis section that evaluates the surrogate on multiple candidate tours generated during the CMA-ES optimization. Specifically, we will report the Pearson correlation coefficient and Spearman's rank correlation between the surrogate costs and the true costs obtained after direct collocation refinement. We will also include examples where the ranking differs and discuss the conditions under which the surrogate remains effective for identifying the optimal route. This addition will directly address the requirement for evidence that the surrogate is rank-preserving. revision: yes
-
Referee: [Abstract] Abstract (validation paragraph): The reported simulations and KUKA experiments validate feasibility and reduced end-to-end time relative to baselines, but do not include an ablation or comparison that isolates whether the joint surrogate search recovers a route whose true time is strictly better than what a decoupled pipeline would have found.
Authors: The current experiments demonstrate that our method achieves lower end-to-end inspection times compared to modular baselines on both simulation and hardware. However, we agree that an explicit ablation isolating the effect of the joint surrogate search on the final true time would provide stronger evidence. In the revision, we will include a comparison where we take the route selected by our joint optimization, refine it with direct collocation to get true time, and contrast it with the true time of the route that would be selected by a decoupled pipeline (e.g., optimizing configurations independently and then solving TSP on the resulting travel times). This will isolate whether the joint approach recovers a superior route in terms of true dynamics. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper's central claim rests on a joint CMA-ES search over order and configuration using an external closed-form admissible double-integrator surrogate, followed by linear direct-collocation refinement on the selected route. No equations reduce the claimed optimum to a quantity defined by the same data or fit; the surrogate is presented as an independent approximation rather than a fitted input renamed as prediction. No self-citation chains, uniqueness theorems from prior author work, or ansatz smuggling are referenced in the text. The reduction from quadratic to linear trajectory solves follows directly from the algorithmic structure (one global search plus linear post-processing) without redefinition. The framework is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The three-dimensional self-motion manifold of each viewpoint can be parameterized in closed form so that the pose constraint holds by construction.
- domain assumption The rest-to-rest travel time between configurations can be approximated by a closed-form admissible double-integrator surrogate that is sufficiently accurate for global search.
Reference graph
Works this paper leans on
-
[1]
Rapidly-exploring random trees: Progress and prospects,
S. M. LaValle, J. J. Kuffner, B. Donaldet al., “Rapidly-exploring random trees: Progress and prospects,”Algorithmic and computational robotics: new directions, vol. 5, pp. 293–308, 2001
2001
-
[2]
Singularity avoidance with application to online trajectory optimization for serial manipulators,
F. Beck, M. N. Vu, C. Hartl-Nesic, and A. Kugi, “Singularity avoidance with application to online trajectory optimization for serial manipulators,”IFAC-PapersOnLine, vol. 56, no. 2, pp. 284–291, 2023
2023
-
[3]
Planning an efficient and robust base sequence for a mobile manipulator performing multiple pick-and-place tasks,
J. Xu, K. Harada, W. Wan, T. Ueshiba, and Y . Domae, “Planning an efficient and robust base sequence for a mobile manipulator performing multiple pick-and-place tasks,” in2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 11 018–11 024
2020
-
[4]
Base position planning for dual-arm mobile manipulators performing a sequence of pick-and-place tasks,
K. Harada, T. Tsuji, K. Kikuchi, K. Nagata, H. Onda, and Y . Kawai, “Base position planning for dual-arm mobile manipulators performing a sequence of pick-and-place tasks,” in2015 IEEE-RAS 15th Inter- national Conference on Humanoid Robots (Humanoids), 2015, pp. 194–201
2015
-
[5]
Optimal path planning for automated dimensional inspection of free-form surfaces,
Y . Liu, W. Zhao, R. Sun, and X. Yue, “Optimal path planning for automated dimensional inspection of free-form surfaces,”Journal of Manufacturing Systems, vol. 56, pp. 84–92, 2020
2020
-
[6]
Spong, S
M. Spong, S. Hutchinson, and M. Vidyasagar,Robot Modeling and Control. Wiley: New York, USA, 2005
2005
-
[7]
Fast trajectory planning and control of a lab-scale 3d gantry crane for a moving target in an environment with obstacles,
M. N. Vu, A. Lobe, F. Beck, T. Weingartshofer, C. Hartl-Nesic, and A. Kugi, “Fast trajectory planning and control of a lab-scale 3d gantry crane for a moving target in an environment with obstacles,”Control Engineering Practice, vol. 126, p. 105255, 2022
2022
-
[8]
Analytical inverse kinematic computation for 7-dof redundant manip- ulators with joint limits and its application to redundancy resolution,
M. Shimizu, H. Kakuya, W.-K. Yoon, K. Kitagaki, and K. Kosuge, “Analytical inverse kinematic computation for 7-dof redundant manip- ulators with joint limits and its application to redundancy resolution,” IEEE Transactions on Robotics, vol. 24, no. 5, pp. 1131–1142, 2008
2008
-
[9]
Machine learning-based framework for optimally solving the analytical inverse kinematics for redundant manipulators,
M. N. Vu, F. Beck, M. Schwegel, C. Hartl-Nesic, A. Nguyen, and A. Kugi, “Machine learning-based framework for optimally solving the analytical inverse kinematics for redundant manipulators,”Mecha- tronics, vol. 91, p. 102970, 2023
2023
-
[10]
Genetic algorithms and random keys for sequencing and optimization,
J. C. Bean, “Genetic algorithms and random keys for sequencing and optimization,”ORSA Journal on Computing, vol. 6, no. 2, pp. 154– 160, 1994
1994
-
[11]
Completely derandomized self- adaptation in evolution strategies,
N. Hansen and A. Ostermeier, “Completely derandomized self- adaptation in evolution strategies,”Evolutionary Computation, vol. 9, no. 2, pp. 159–195, 2001
2001
-
[12]
A restart cma evolution strategy with increasing population size,
A. Auger and N. Hansen, “A restart cma evolution strategy with increasing population size,” inIEEE Congress on Evolutionary Com- putation (CEC), vol. 2. IEEE, 2005, pp. 1769–1776
2005
-
[13]
A simple modification in CMA-ES achieving linear time and space complexity,
R. Ros and N. Hansen, “A simple modification in CMA-ES achieving linear time and space complexity,” inInternational Conference on Parallel Problem Solving from Nature (PPSN), 2008, pp. 296–305
2008
-
[14]
A computationally efficient limited memory CMA-ES for large scale optimization,
I. Loshchilov, “A computationally efficient limited memory CMA-ES for large scale optimization,” inProceedings of the Annual Conference on Genetic and Evolutionary Computation (GECCO), 2014, pp. 397– 404
2014
-
[15]
J. T. Betts,Practical methods for optimal control and estimation using nonlinear programming. Siam: Philadelphia, USA, 2010
2010
-
[16]
Requiem for the miller–tucker–zemlin subtour elimination constraints?
T. Bektas ¸ and L. Gouveia, “Requiem for the miller–tucker–zemlin subtour elimination constraints?”European Journal of Operational Research, vol. 236, no. 3, pp. 820–832, 2014
2014
-
[17]
CasADi – A software framework for nonlinear optimization and optimal control,
J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi – A software framework for nonlinear optimization and optimal control,”Mathematical Programming Computation, vol. 11, pp. 1–36, 2019
2019
-
[18]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,”Mathematical Programming, vol. 106, pp. 25–57, 2006
2006
-
[19]
Vp-sto: Via-point-based stochastic trajectory optimization for reactive robot behavior,
J. Jankowski, L. Bruderm ¨uller, N. Hawes, and S. Calinon, “Vp-sto: Via-point-based stochastic trajectory optimization for reactive robot behavior,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 10 125–10 131
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.