Robust Expectation-Maximization for Covariance Estimation in SIRV Models with Missing Data: Application to InSAR Time Series
Pith reviewed 2026-06-26 09:42 UTC · model grok-4.3
The pith
An inverse-gamma prior on scale variables turns SIRV covariance estimation into a Student-t model with closed-form EM updates for missing data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that an inverse-gamma prior on the scale variables in SIRV models results in a complex multivariate Student-t observation model, enabling closed-form updates in the EM algorithm for covariance estimation under missing data, with numerical robustness techniques ensuring stability, and experiments confirming effective reconstruction and denoising in InSAR time series under MCAR and MNAR missingness.
What carries the argument
The inverse-gamma prior on scale variables, which transforms the SIRV model into a complex multivariate Student-t distribution allowing closed-form E and M steps in the EM algorithm for covariance estimation with missing data.
Load-bearing premise
Missingness mechanisms are ignorable so that the likelihood can be maximized without modeling how data went missing.
What would settle it
If applying the closed-form E-step and M-step to synthetic data with known covariance does not recover the true covariance matrix within expected error bounds, or if real InSAR data shows no improvement in reconstruction compared to standard methods.
Figures
read the original abstract
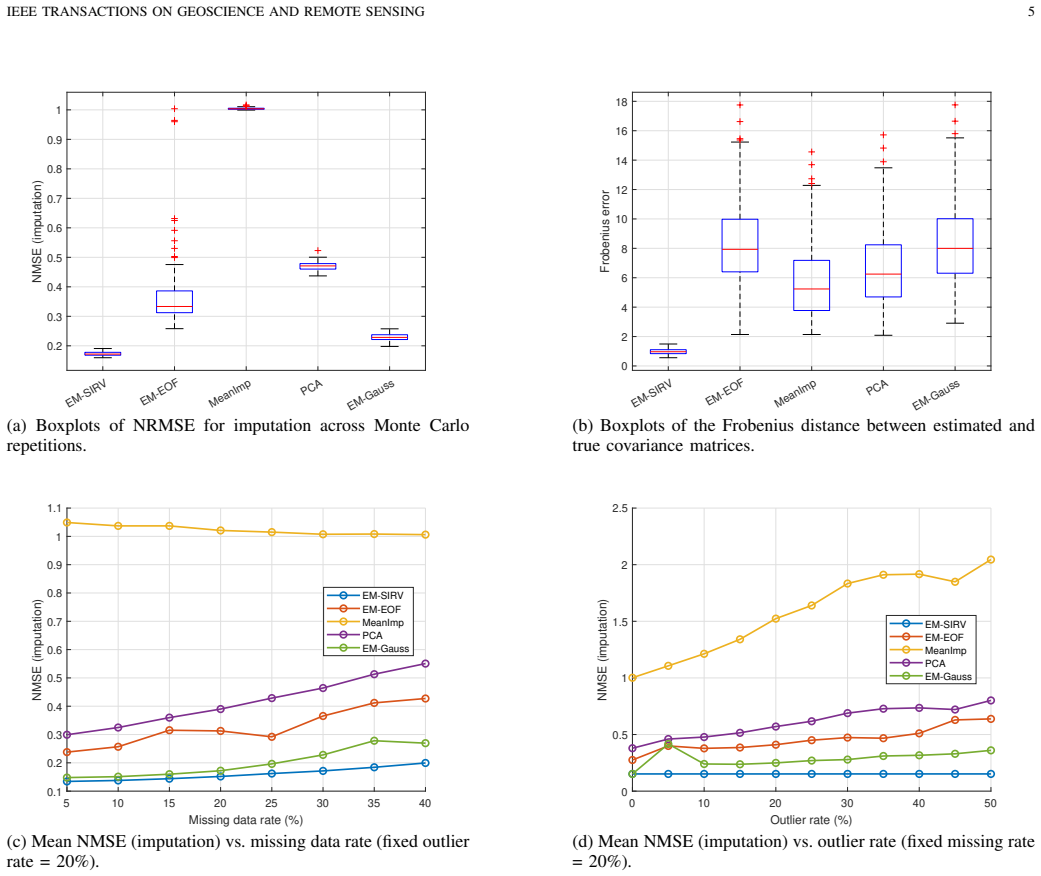
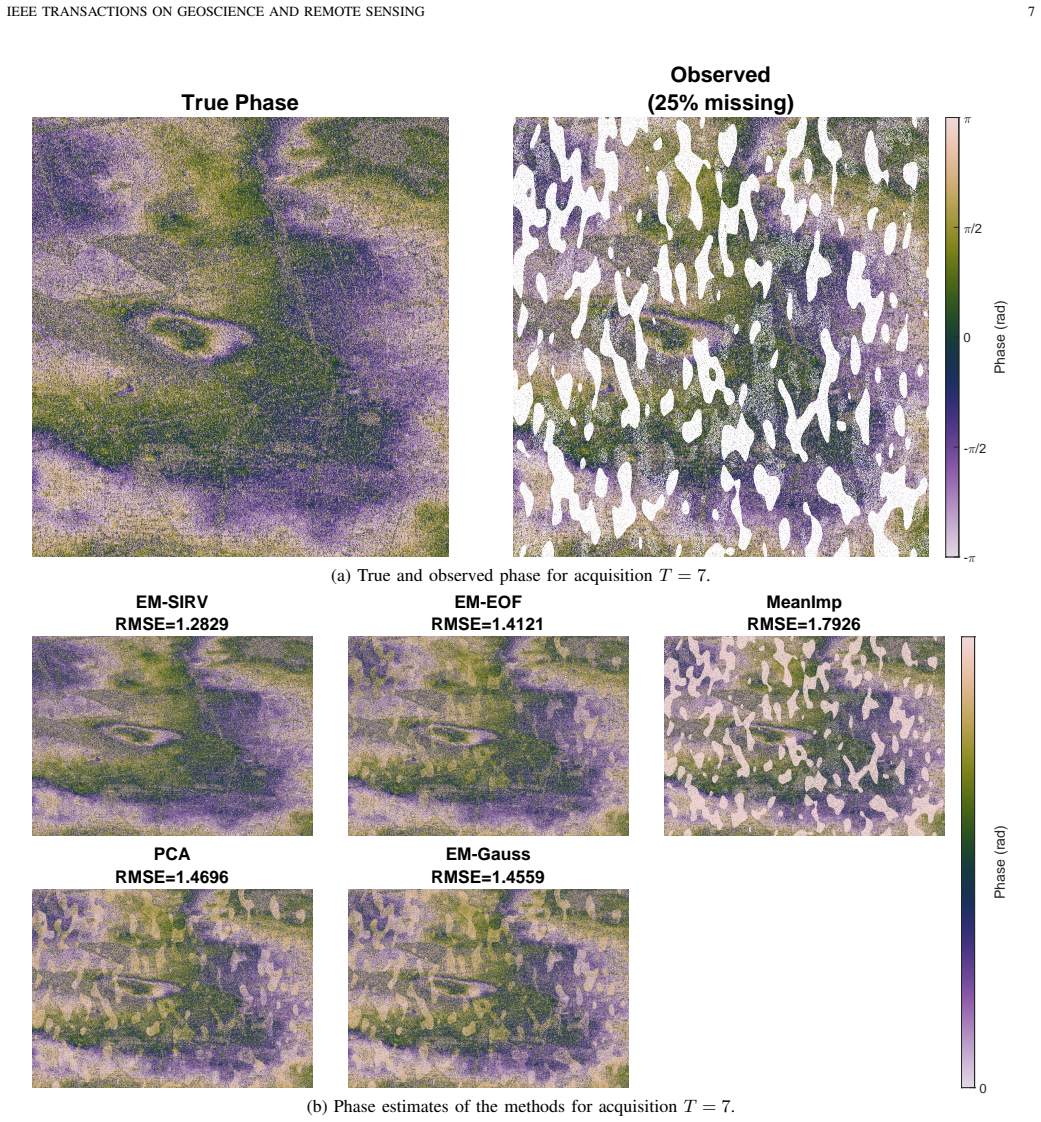
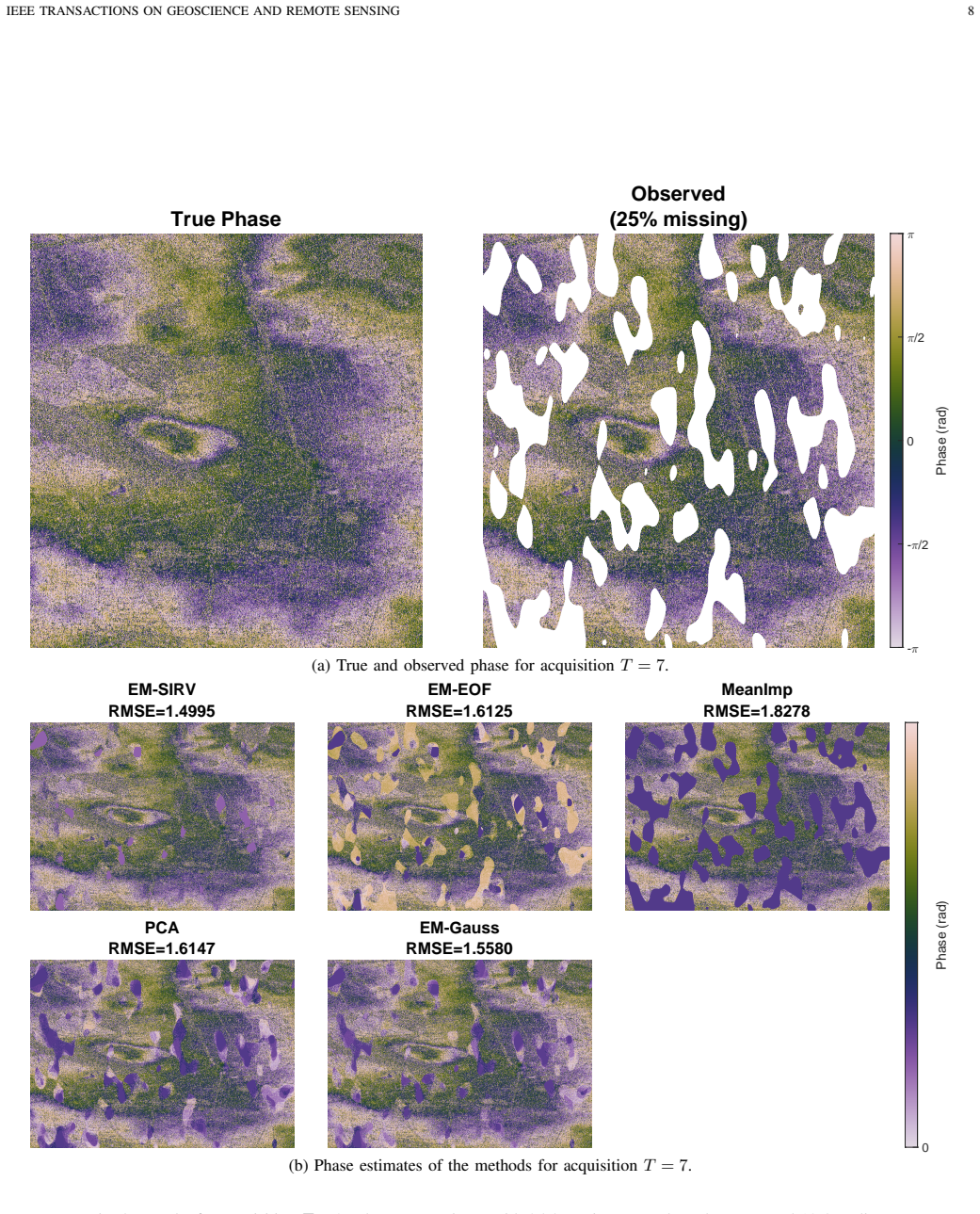
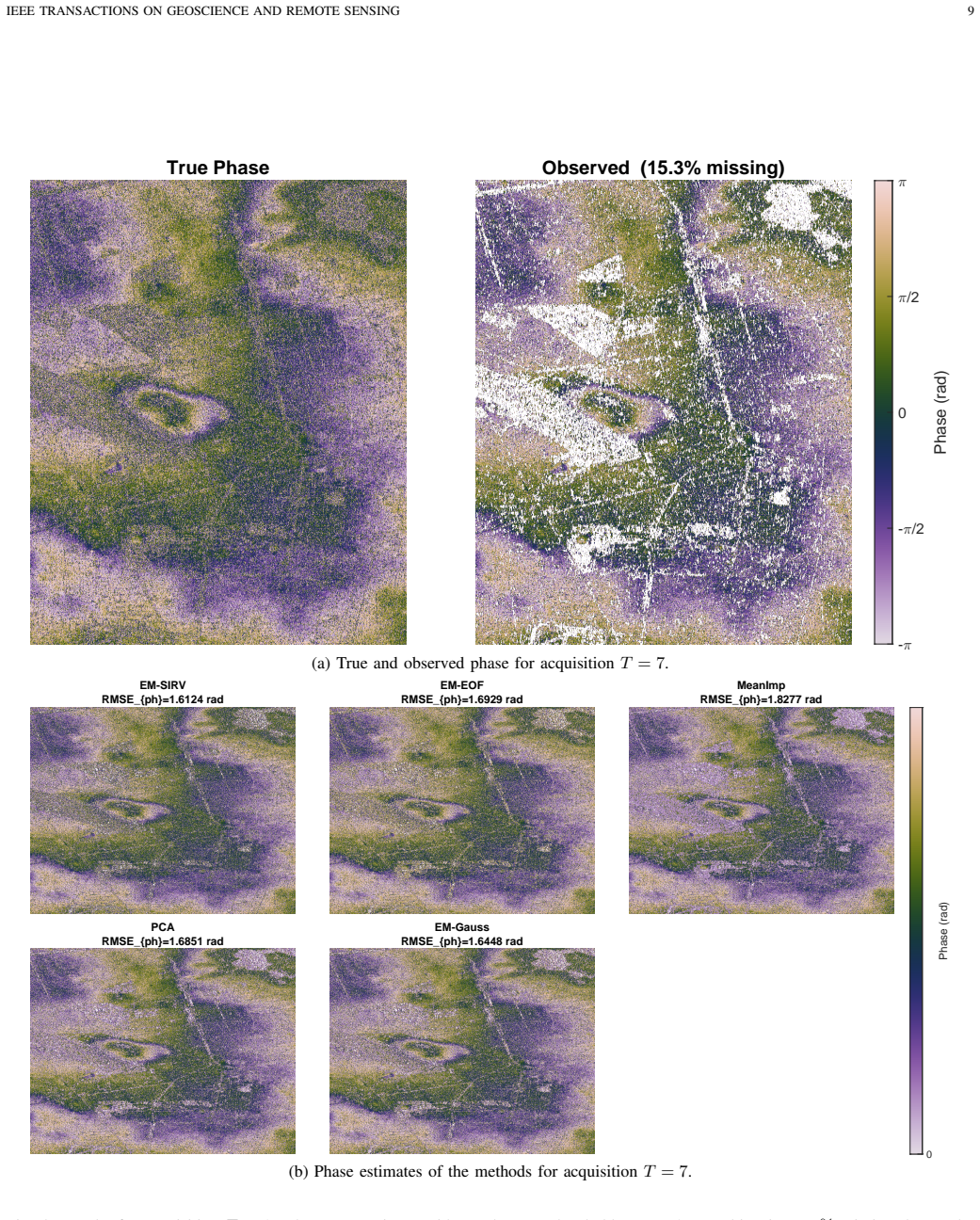
This paper presents a robust Expectation-Maximization framework for covariance estimation in Scale-Invariant Random Vector (SIRV) models with missing data under ignorable missingness mechanisms. By adopting an inverse-gamma prior on the scale variables, the resulting observation model leads to a complex multivariate Student-t distribution and allows closed-form E-step and M-step updates. The proposed algorithm incorporates numerical robustness techniques such as computation reuse for common observation patterns, regularized matrix inversions, and explicit enforcement of Hermitian positive semidefinite structure. Experiments on synthetic data and Sentinel-1 interferograms show effective missing value reconstruction and denoising performance under both MCAR and MNAR scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a robust EM algorithm for covariance estimation in SIRV models with missing observations under ignorable missingness. An inverse-gamma prior on the scale variables yields a complex multivariate Student-t observation model that admits closed-form E-step and M-step updates; numerical safeguards (pattern reuse, regularized inversions, Hermitian PSD enforcement) are added. Experiments on synthetic data and Sentinel-1 interferograms report effective missing-value reconstruction and denoising for both MCAR and MNAR patterns.
Significance. If the derivations and experiments hold, the work supplies a practical, closed-form tool for covariance estimation under missing data that is directly relevant to InSAR time-series processing; the explicit robustness techniques and reported performance on real interferograms would constitute a concrete contribution to the applied statistics literature.
major comments (1)
- [Abstract] Abstract (and presumably §2–3): the derivation explicitly conditions on ignorable missingness (MCAR/MAR) so that the observed-data likelihood requires no separate missingness model, yet the abstract and experimental claims assert effective performance “under both MCAR and MNAR scenarios.” Because MNAR is non-ignorable by definition, the same likelihood is misspecified for MNAR data; this internal gap between modeling assumptions and claimed empirical scope is load-bearing for the central performance claim.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comment on the scope of our modeling assumptions. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract (and presumably §2–3): the derivation explicitly conditions on ignorable missingness (MCAR/MAR) so that the observed-data likelihood requires no separate missingness model, yet the abstract and experimental claims assert effective performance “under both MCAR and MNAR scenarios.” Because MNAR is non-ignorable by definition, the same likelihood is misspecified for MNAR data; this internal gap between modeling assumptions and claimed empirical scope is load-bearing for the central performance claim.
Authors: We agree that the derivation in Sections 2–3 is conditioned on ignorable missingness, so the observed-data likelihood is formally misspecified under MNAR. The experiments include both MCAR and MNAR simulation patterns to evaluate practical behavior when the ignorability assumption is violated. To resolve the inconsistency between the stated modeling assumptions and the abstract/experimental claims, we will revise the abstract and the relevant experimental discussion to (i) explicitly restate that the method is derived under ignorable missingness and (ii) characterize the MNAR results as an empirical robustness check rather than a claim of validity under non-ignorable mechanisms. These changes will appear in the revised manuscript. revision: yes
Circularity Check
No circularity detected in derivation chain
full rationale
The paper's core derivation adopts an inverse-gamma prior on scale variables to obtain a complex multivariate Student-t observation model, yielding closed-form E- and M-step updates within the EM algorithm for covariance estimation under the SIRV model with missing data. This follows standard Bayesian-EM construction for scale mixtures and does not reduce any claimed prediction or result to its inputs by definition, nor does it rely on self-citation load-bearing or imported uniqueness theorems. The abstract explicitly conditions the framework on ignorable missingness (MCAR/MAR), with numerical robustness techniques described separately; the reported MNAR experiments constitute an empirical scope claim rather than a mathematical reduction. No quoted step equates a derived quantity to a fitted input or prior ansatz by construction. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Missing data mechanisms are ignorable (MCAR/MNAR but ignorable)
Reference graph
Works this paper leans on
-
[1]
Recursive estimation of the covariance matrix of a compound-gaussian process and its application to adaptive cfar detection,
E. Conte, A. De Maio, and G. Ricci, “Recursive estimation of the covariance matrix of a compound-gaussian process and its application to adaptive cfar detection,” IEEE Transactions on signal processing , vol. 50, no. 8, pp. 1908–1915, 2002
1908
-
[2]
Exact maximum likelihood estimates for sirv covariance matrix: Existence and algorithm analysis,
Y . Chitour and F. Pascal, “Exact maximum likelihood estimates for sirv covariance matrix: Existence and algorithm analysis,” IEEE Transactions on signal processing , vol. 56, no. 10, pp. 4563–4573, 2008
2008
-
[3]
Delmas, M
J.-P . Delmas, M. N. El Korso, S. Fortunati, and F. Pascal, Elliptically symmetric distributions in signal processing and machine learning . Springer, 2024, vol. 1
2024
-
[4]
Co- variance structure maximum-likelihood estimates in compound Gaussian noise,
F. Pascal, Y . Chitour, J.-P . Ovarlez, P . Forster, and P . Larzabal, “Co- variance structure maximum-likelihood estimates in compound Gaussian noise,” IEEE Trans. Signal Process. , vol. 56, no. 1, pp. 34–48, 2008
2008
-
[5]
A distribution-free M-estimator of multivariate scatter,
D. E. Tyler, “A distribution-free M-estimator of multivariate scatter,” Ann. Statist. , vol. 15, pp. 234–251, 1987
1987
-
[6]
Matched and mismatched estimation of kronecker product of linearly structured scatter matrices under elliptical distributions,
B. Meriaux, C. Ren, A. Breloy, M. N. El Korso, and P . Forster, “Matched and mismatched estimation of kronecker product of linearly structured scatter matrices under elliptical distributions,” IEEE Transactions on Signal Processing , vol. 69, pp. 603–616, 2020
2020
-
[7]
Detection methods based on structured covariance matrices for multivariate sar images processing,
R. B. Abdallah, A. Mian, A. Breloy, A. Taylor, M. N. El Korso, and D. Lautru, “Detection methods based on structured covariance matrices for multivariate sar images processing,” IEEE Geoscience and Remote Sensing Letters , vol. 16, no. 7, pp. 1160–1164, 2019
2019
-
[8]
Spatio-temporal filling of missing points in geophysical data sets,
D. Kondrashov and M. Ghil, “Spatio-temporal filling of missing points in geophysical data sets,” Nonlinear Processes in Geophysics , vol. 13, no. 2, pp. 151–159, 2006
2006
-
[9]
Predicting missing values in spatio-temporal remote sensing data,
F. Gerber, R. de Jong, M. E. Schaepman, G. Schaepman-Strub, and R. Furrer, “Predicting missing values in spatio-temporal remote sensing data,” IEEE Transactions on Geoscience and Remote Sensing , vol. 56, no. 5, pp. 2841–2853, 2018
2018
-
[10]
Eof calculations and data filling from incomplete oceanographic datasets,
J.-M. Beckers and M. Rixen, “Eof calculations and data filling from incomplete oceanographic datasets,” Journal of Atmospheric and oceanic technology, vol. 20, no. 12, pp. 1839–1856, 2003
2003
-
[11]
Em-eof: Gap-filling in incom- plete sar displacement time series,
A. Hippert-Ferrer, Y . Y an, and P . Bolon, “Em-eof: Gap-filling in incom- plete sar displacement time series,” IEEE Transactions on Geoscience and Remote Sensing , vol. 59, no. 7, pp. 5794–5811, 2020
2020
-
[12]
Robust low-rank covariance matrix estimation with a general pattern of missing values,
A. Hippert-Ferrer, M. N. El Korso, A. Breloy, and G. Ginolhac, “Robust low-rank covariance matrix estimation with a general pattern of missing values,” Signal Processing , vol. 198, p. 108460, 2022
2022
-
[13]
R. J. A. Little and D. B. Rubin, Statistical Analysis with Missing Data , 2nd ed. New Y ork: Wiley, 2002
2002
-
[14]
Robust covariance and scatter matrix estimation under hubers contamination model,
M. Chen, C. Gao, and Z. Ren, “Robust covariance and scatter matrix estimation under hubers contamination model,” The Annals of Statistics , vol. 46, no. 5, pp. 1932–1960, 2018
1932
-
[15]
Missing data in signal processing and machine learning: Mod- els, methods and modern approaches,
A. Hippert-Ferrer, A. Sportisse, A. Javaheri, M. N. E. Korso, and D. P . Palomar, “Missing data in signal processing and machine learning: Mod- els, methods and modern approaches,” arXiv preprint arXiv:2506.01696, 2025
arXiv 2025
-
[16]
Robust inference with incompleteness for logistic regression model,
M. Cherifi, M. N. El Korso, S. Fortunati, A. Mesloub, and L. Ferro- Famil, “Robust inference with incompleteness for logistic regression model,” Signal Processing , vol. 236, p. 110027, 2025
2025
-
[17]
Maximum likelihood from incomplete data via the em algorithm,
A. P . Dempster, N. M. Laird, and D. B. Rubin, “Maximum likelihood from incomplete data via the em algorithm,” Journal of the royal statistical society: series B (methodological) , vol. 39, no. 1, pp. 1–22, 1977
1977
-
[18]
Complex elliptically symmetric distributions: Survey, new results and applications,
E. Ollila, D. E. Tyler, V . Koivunen, and H. V . Poor, “Complex elliptically symmetric distributions: Survey, new results and applications,” IEEE Transactions on signal processing, vol. 60, no. 11, pp. 5597–5625, 2012
2012
-
[19]
A generalization of Tyler’s M-estimators to the case of incomplete data,
G. Frahm and U. Jaekel, “A generalization of Tyler’s M-estimators to the case of incomplete data,” Comput. Statist. Data Anal. , vol. 54, pp. 374–393, 2010
2010
-
[20]
Regularized tyler’s scatter esti- mator: Existence, uniqueness, and algorithms,
Y . Sun, P . Babu, and D. P . Palomar, “Regularized tyler’s scatter esti- mator: Existence, uniqueness, and algorithms,” IEEE Transactions on Signal Processing , vol. 62, no. 19, pp. 5143–5156, 2014
2014
-
[21]
Kotz and S
S. Kotz and S. Nadarajah, Multivariate t-distributions and their appli- cations. Cambridge university press, 2004
2004
-
[22]
Handling missing values in exploratory mul- tivariate data analysis methods,
J. Josse and F. Husson, “Handling missing values in exploratory mul- tivariate data analysis methods,” Journal de la société française de statistique, vol. 153, no. 2, pp. 79–99, 2012
2012
-
[23]
Synthetic aperture radar interferometry,
R. Bamler and P . Hartl, “Synthetic aperture radar interferometry,”Inverse problems, vol. 14, no. 4, pp. R1–R54, 1998
1998
-
[24]
Decorrelation in interferometric radar echoes,
H. Zebker, J. Villasenor et al. , “Decorrelation in interferometric radar echoes,” IEEE Transactions on geoscience and remote sensing , vol. 30, no. 5, pp. 950–959, 1992
1992
-
[25]
European Space Agency (ESA), “SNAP,” https://step.esa.int/main/ toolboxes/snap
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.