Efficient Continuous Semantic Mapping based on Spatio-Temporal Awareness
Pith reviewed 2026-06-26 10:04 UTC · model grok-4.3
The pith
Incorporating spatial and temporal relationships into semantic inference improves robot mapping accuracy by about 12%.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
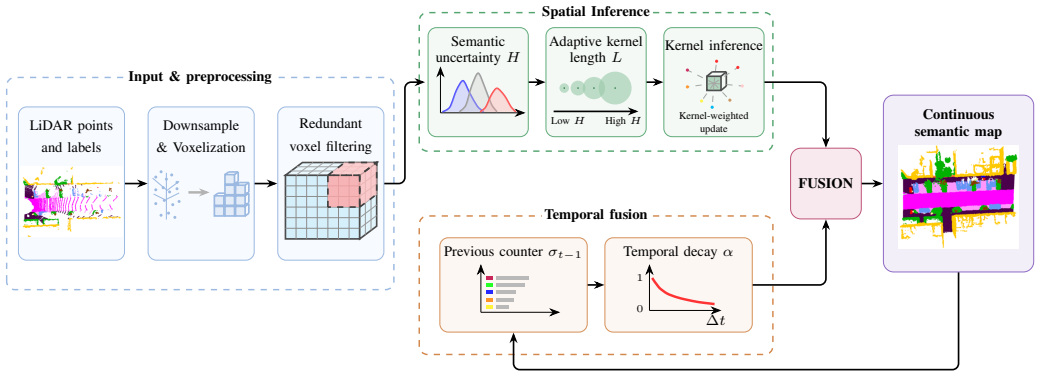
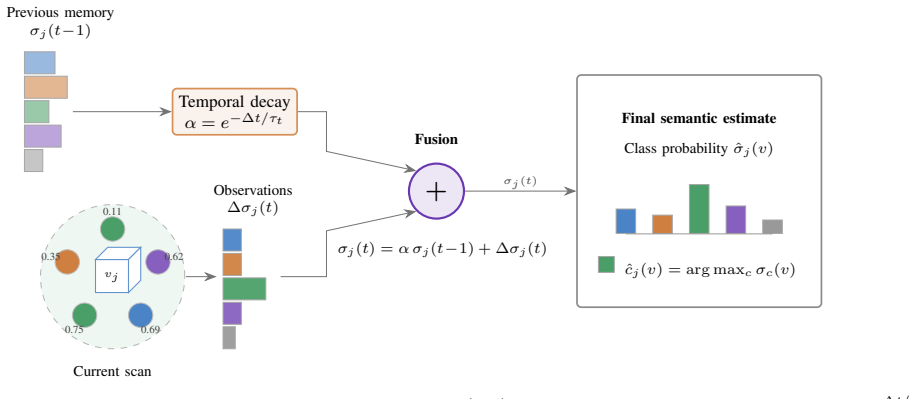
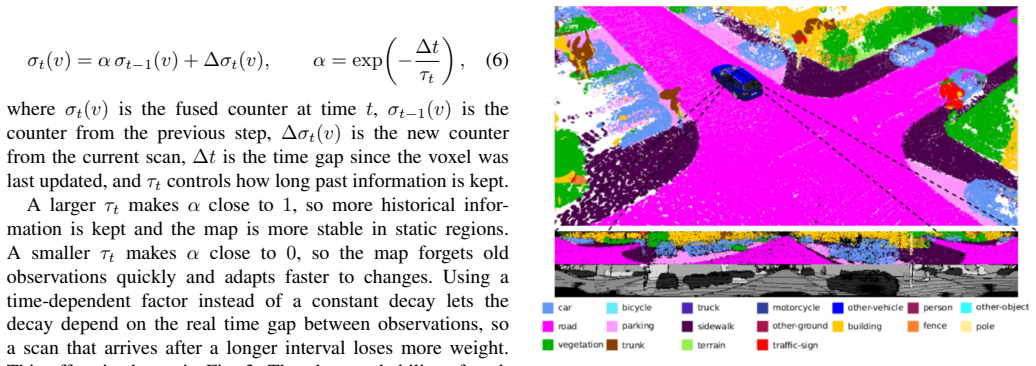
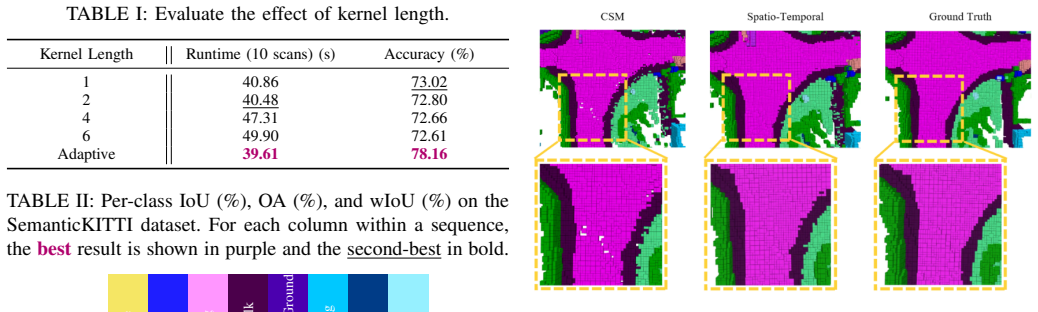
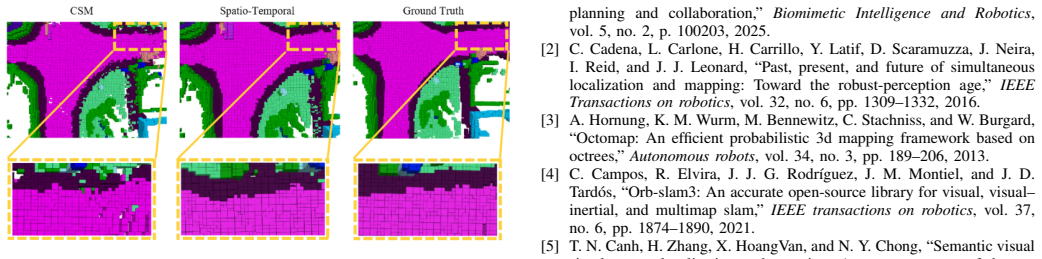
The paper claims that embedding spatial and temporal relationships directly into the semantic inference step produces more accurate and efficient continuous maps. It does so by scaling the spatial inference range to local semantic uncertainty and by fusing successive label predictions to enforce temporal consistency, thereby avoiding exhaustive per-voxel processing and label flicker in dynamic scenes. Experiments on SemanticKITTI confirm an accuracy gain of roughly 12 percent and an mIoU of 54.92 percent, 13.18 points above spatial-only mapping.
What carries the argument
Dynamic adjustment of the spatial inference range according to local semantic uncertainty together with temporal label fusion across observations.
If this is right
- Mapping accuracy rises by approximately 12 percent relative to spatial-only baselines.
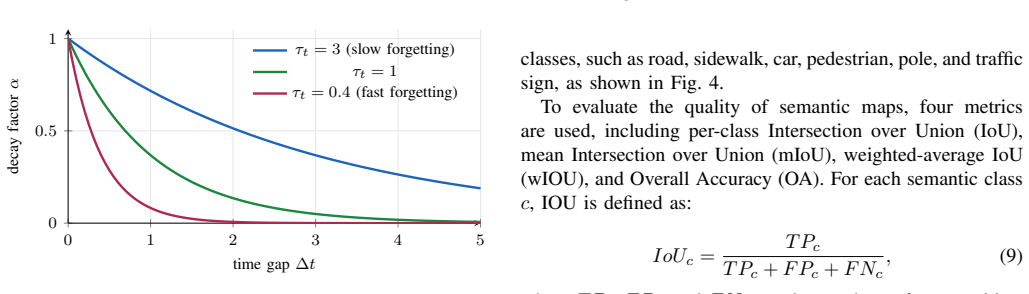
- Mean intersection-over-union reaches 54.92 percent on SemanticKITTI.
- Label stability improves in scenes that change over time.
- Overall computational cost drops because inference is limited to uncertain regions.
- The resulting maps support more robust long-term robot navigation.
Where Pith is reading between the lines
- The same uncertainty-driven range adjustment could be applied to other voxel-based perception tasks such as occupancy or instance segmentation.
- Deployment on physical robots would reveal whether the reported efficiency gains survive real sensor noise and motion blur.
- Extending the temporal fusion window beyond adjacent frames might further reduce label flicker in slowly evolving environments.
- The approach suggests that future mapping pipelines should treat time as a first-class constraint rather than a post-processing step.
Load-bearing premise
The measured accuracy gains come specifically from adding spatio-temporal relationships rather than from other implementation choices or dataset properties.
What would settle it
Re-running the method after removing the temporal fusion step and checking whether the 13-point mIoU advantage over spatial-only mapping disappears.
Figures
read the original abstract
Continuous semantic mapping allows autonomous robots to understand both the spatial structure and the semantic content of complex environments. However, most existing methods process the entire space, treat voxels as independent units, and do not keep the semantic labels consistent over time. This leads to high computational cost and reduced robustness in dynamic scenes. This paper proposes a semantic mapping method that brings spatial and temporal relationships into the semantic inference process. The method adjusts the inference range according to the local semantic uncertainty and fuses labels over time to improve map stability and computational efficiency. Experiments on the SemanticKITTI dataset show that the proposed method improves mapping accuracy by about 12% and reaches an mIoU of 54.92%, which is 13.18 percentage points higher than spatial-only mapping. These results show that spatiotemporal reasoning is effective for continuous semantic mapping in autonomous robotic systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a continuous semantic mapping method for autonomous robots that incorporates spatio-temporal relationships via uncertainty-driven adjustment of the inference range and temporal fusion of semantic labels. This is claimed to reduce computational cost and improve robustness compared to methods that process the entire space with independent voxels. Experiments on SemanticKITTI report an mIoU of 54.92% (13.18 pp above a spatial-only baseline) and an overall accuracy improvement of about 12%.
Significance. If the reported gains can be isolated to the spatio-temporal components, the method would address a practical gap in efficient, consistent semantic mapping for dynamic scenes; the uncertainty-driven range adjustment and label fusion are plausible mechanisms for lowering cost while maintaining accuracy.
major comments (1)
- [Experiments] Experiments (abstract and results): the headline claim that spatio-temporal reasoning produces the +13.18 pp mIoU gain rests on a comparison to “spatial-only mapping,” yet no ablation is described that disables only the temporal label fusion while holding fixed the voxel grid, network, uncertainty-driven range adjustment, and inference pipeline. Without this isolation the observed delta cannot be attributed specifically to the proposed spatio-temporal relationships rather than other unstated implementation differences.
minor comments (1)
- [Abstract] Abstract: quantitative claims are stated without defining the spatial-only baseline, reporting error bars, or specifying the underlying segmentation network and training protocol.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on experimental isolation. We address the concern point-by-point below and will revise the manuscript to improve clarity on the baseline.
read point-by-point responses
-
Referee: [Experiments] Experiments (abstract and results): the headline claim that spatio-temporal reasoning produces the +13.18 pp mIoU gain rests on a comparison to “spatial-only mapping,” yet no ablation is described that disables only the temporal label fusion while holding fixed the voxel grid, network, uncertainty-driven range adjustment, and inference pipeline. Without this isolation the observed delta cannot be attributed specifically to the proposed spatio-temporal relationships rather than other unstated implementation differences.
Authors: The spatial-only mapping baseline is implemented precisely by disabling only the temporal label fusion while keeping the voxel grid, network, uncertainty-driven range adjustment, and full inference pipeline fixed. This directly isolates the contribution of the temporal component, and the reported +13.18 pp mIoU gain is measured against this controlled baseline. We will revise the experiments section to explicitly describe this configuration and confirm that no other implementation differences exist between the two variants. revision: yes
Circularity Check
No circularity: empirical method with no derivation chain
full rationale
The paper describes a semantic mapping algorithm that adjusts inference range by uncertainty and fuses labels temporally, then reports mIoU gains on SemanticKITTI versus a spatial-only baseline. No equations, fitted parameters, uniqueness theorems, or self-citations appear in the provided text that could reduce any claimed result to its inputs by construction. The accuracy numbers are direct experimental outcomes rather than predictions derived from the method itself, so the derivation chain (such as it is) is self-contained and non-circular.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A survey of autonomous robots and multi-robot navigation: Perception, planning and collaboration,
W. Chen, W. Chi, S. Ji, H. Ye, J. Liu, Y . Jia, J. Yu, and J. Cheng, “A survey of autonomous robots and multi-robot navigation: Perception, planning and collaboration,”Biomimetic Intelligence and Robotics, vol. 5, no. 2, p. 100203, 2025
2025
-
[2]
Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,
C. Cadena, L. Carlone, H. Carrillo, Y . Latif, D. Scaramuzza, J. Neira, I. Reid, and J. J. Leonard, “Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,”IEEE Transactions on robotics, vol. 32, no. 6, pp. 1309–1332, 2016
2016
-
[3]
Octomap: An efficient probabilistic 3d mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “Octomap: An efficient probabilistic 3d mapping framework based on octrees,”Autonomous robots, vol. 34, no. 3, pp. 189–206, 2013
2013
-
[4]
Orb-slam3: An accurate open-source library for visual, visual– inertial, and multimap slam,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. Montiel, and J. D. Tard´os, “Orb-slam3: An accurate open-source library for visual, visual– inertial, and multimap slam,”IEEE transactions on robotics, vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[5]
Semantic visual simultaneous localization and mapping: A survey on state of the art, challenges, and future directions,
T. N. Canh, H. Zhang, X. HoangVan, and N. Y . Chong, “Semantic visual simultaneous localization and mapping: A survey on state of the art, challenges, and future directions,”Robotics and Autonomous Systems, vol. 203, p. 105535, 2026
2026
-
[6]
Object-oriented semantic mapping for reliable uavs navigation,
T. N. Canh, A. Elibol, N. Y . Chong, and X. HoangVan, “Object-oriented semantic mapping for reliable uavs navigation,” in2023 12th Inter- national Conference on Control, Automation and Information Sciences (ICCAIS). IEEE, 2023, pp. 139–144
2023
-
[7]
See-csom: Sharp- edged and efficient continuous semantic occupancy mapping for mobile robots,
Y . Deng, M. Wang, Y . Yang, D. Wang, and Y . Yue, “See-csom: Sharp- edged and efficient continuous semantic occupancy mapping for mobile robots,”IEEE Transactions on Industrial Electronics, vol. 71, no. 2, pp. 1718–1728, 2024
2024
-
[8]
S3m: Semantic segmentation sparse mapping for uavs with rgb-d cam- era,
T. N. Canh, V .-T. Nguyen, X. HoangVan, A. Elibol, and N. Y . Chong, “S3m: Semantic segmentation sparse mapping for uavs with rgb-d cam- era,” in2024 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2024, pp. 899–905
2024
-
[9]
Bayesian generalized kernel inference for occupancy map prediction,
K. Doherty, J. Wang, and B. Englot, “Bayesian generalized kernel inference for occupancy map prediction,” in2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017, pp. 3118–3124
2017
-
[10]
Continuous occupancy map fusion with fast bayesian hilbert maps,
W. Zhi, L. Ott, R. Senanayake, and F. Ramos, “Continuous occupancy map fusion with fast bayesian hilbert maps,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 4111–4117
2019
-
[11]
Bayesian spatial kernel smoothing for scalable dense semantic map- ping,
L. Gan, R. Zhang, J. W. Grizzle, R. M. Eustice, and M. Ghaffari, “Bayesian spatial kernel smoothing for scalable dense semantic map- ping,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 790–797, 2020
2020
-
[12]
Convbki: Real-time probabilistic semantic mapping network with quantifiable uncertainty,
J. Wilson, Y . Fu, J. Friesen, P. Ewen, A. Capodieci, P. Jayakumar, K. Barton, and M. Ghaffari, “Convbki: Real-time probabilistic semantic mapping network with quantifiable uncertainty,”IEEE Transactions on Robotics, vol. 40, pp. 4648–4667, 2024
2024
-
[13]
Semantickitti: A dataset for semantic scene understanding of lidar sequences,
J. Behley, M. Garbade, A. Milioto, J. Quenzel, S. Behnke, C. Stachniss, and J. Gall, “Semantickitti: A dataset for semantic scene understanding of lidar sequences,” inProceedings of the IEEE/CVF international conference on computer vision, 2019, pp. 9297–9307
2019
-
[14]
Semantic mapping with simultaneous object detection and localization,
Z. Zeng, Y . Zhou, O. C. Jenkins, and K. Desingh, “Semantic mapping with simultaneous object detection and localization,” in2018 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2018, pp. 911–918
2018
-
[15]
Stamics: Splat, track and map with integrated consistency and semantics for dense rgb-d slam,
W. Yi, Y . Wang, X. Cao, and Z. Fan, “Stamics: Splat, track and map with integrated consistency and semantics for dense rgb-d slam,” in2026 6th International Symposium on Intelligent Robotics and Systems (ISoIRS). IEEE, 2026, pp. 1–7
2026
-
[16]
Khronos: A unified approach for spatio-temporal metric-semantic SLAM in dynamic envi- ronments,
L. Schmid, M. Abate, Y . Chang, and L. Carlone, “Khronos: A unified approach for spatio-temporal metric-semantic SLAM in dynamic envi- ronments,” inRobotics: Science and Systems (RSS), 2024
2024
-
[17]
Sni-slam: Semantic neural implicit slam,
S. Zhu, G. Wang, H. Blum, J. Liu, L. Song, M. Pollefeys, and H. Wang, “Sni-slam: Semantic neural implicit slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 21 167–21 177
2024
-
[18]
Sgs- slam: Semantic gaussian splatting for neural dense slam,
M. Li, S. Liu, H. Zhou, G. Zhu, N. Cheng, T. Deng, and H. Wang, “Sgs- slam: Semantic gaussian splatting for neural dense slam,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 163–179
2024
-
[19]
A sparse covariance function for exact gaussian process inference in large datasets
A. Melkumyan and F. Ramos, “A sparse covariance function for exact gaussian process inference in large datasets.” inIJCAI, vol. 9, 2009, pp. 1936–1942
2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.