SkyChain Intelligence: A Blockchain-Secured Multi-Agent DRL Framework for Low-Altitude Embodied Artificial Intelligence
Pith reviewed 2026-06-25 22:20 UTC · model grok-4.3
The pith
A blockchain-integrated multi-agent DRL system jointly optimizes offloading, allocation, and trajectories while managing trust in untrusted low-altitude networks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
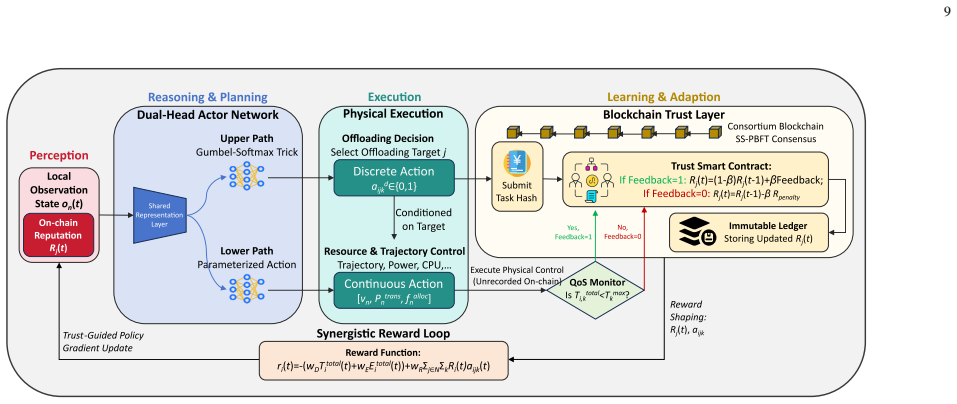
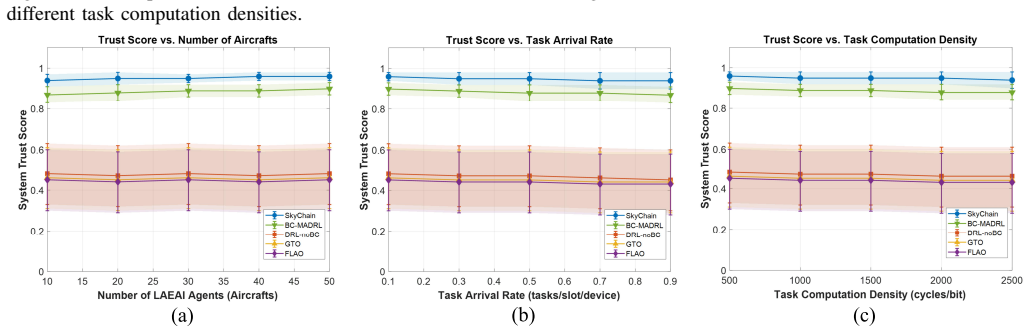
SkyChain Intelligence integrates a lightweight blockchain-based decentralized trust management system that maintains dynamic reputation scores with a hybrid-action-space MADDPG algorithm whose reward function incorporates those scores, enabling agents to optimize offloading decisions, resource allocation, and drone trajectories simultaneously in the presence of malicious participants.
What carries the argument
The hybrid-action-space MADDPG algorithm that embeds on-chain reputation scores into the reward function to guide joint optimization of offloading, allocation, and 3D trajectories.
If this is right
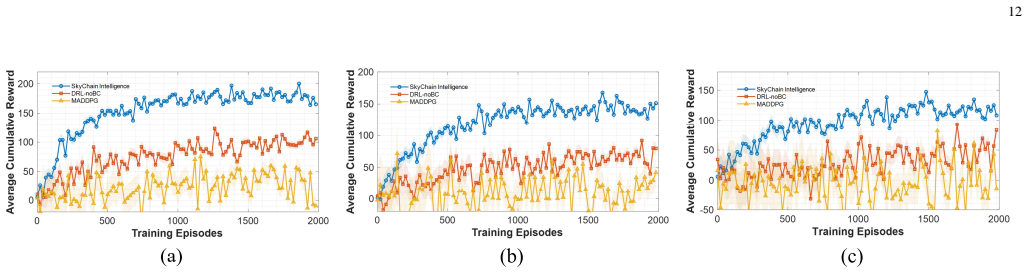
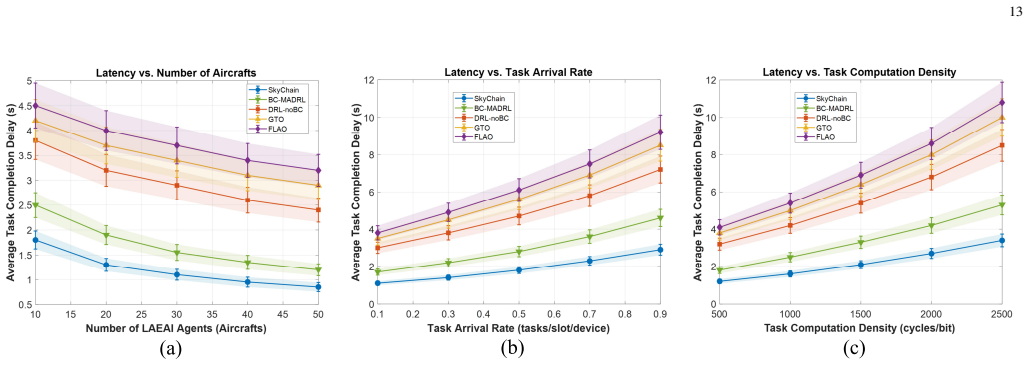
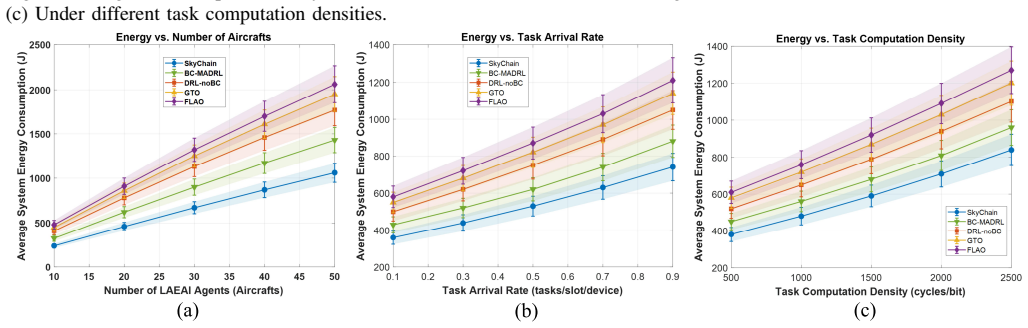
- Task completion latency and energy consumption fall below those of existing baselines.
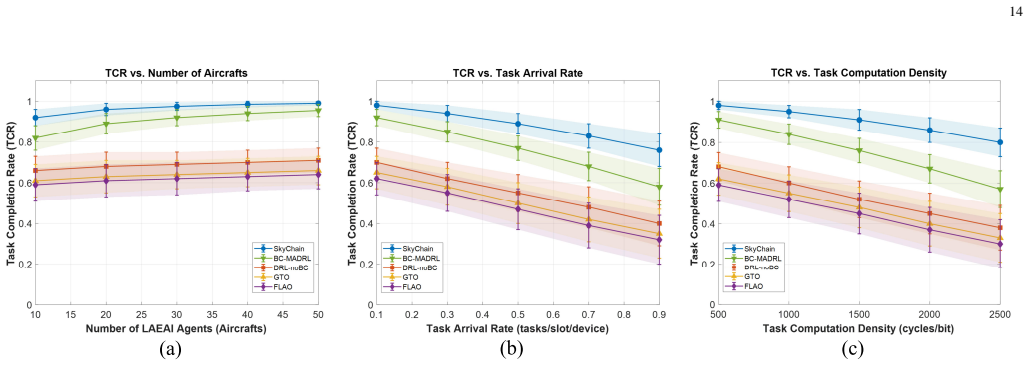
- Task completion rate reaches 94.1 percent under the reported baseline conditions.
- Training reaches stable convergence inside 300 episodes.
- The architecture supplies a workable route to secure, autonomous machine-to-machine computing ecosystems in low-altitude domains.
Where Pith is reading between the lines
- The same reputation embedding technique could be tested in other decentralized settings such as vehicular edge networks where agents also face untrusted peers.
- Hardware-in-the-loop experiments would reveal whether blockchain consensus latency grows too large once the number of agents exceeds the simulated scale.
- Adding explicit physical-layer channel models to the reward function might further tighten the security-performance trade-off beyond what the current abstract reputation score achieves.
- The framework's convergence speed suggests it could support online retraining when new agents join or leave the network.
Load-bearing premise
The simulation environment and chosen baselines accurately represent real-world malicious agent behavior, wireless dynamics, and resource constraints without favoring the proposed method through post-hoc tuning.
What would settle it
Running the identical algorithm on physical drones in an outdoor testbed containing actual malicious jamming or spoofing agents and checking whether measured task completion stays above 90 percent while latency and energy remain lower than the simulated baselines.
Figures
read the original abstract
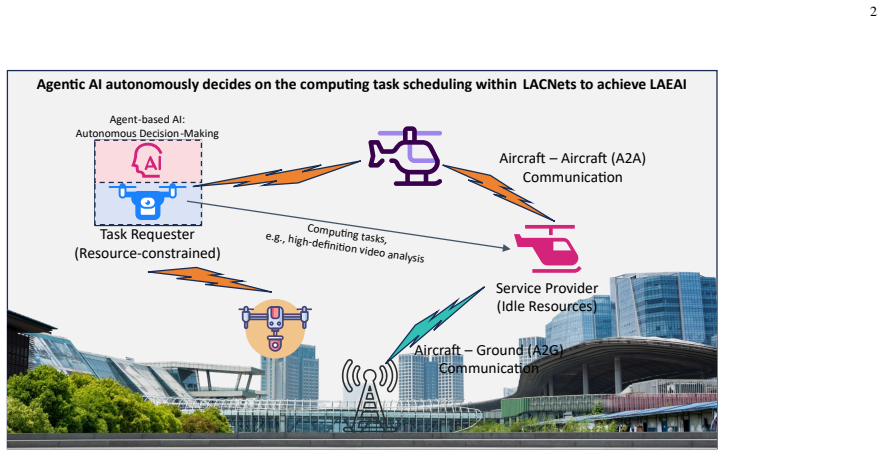
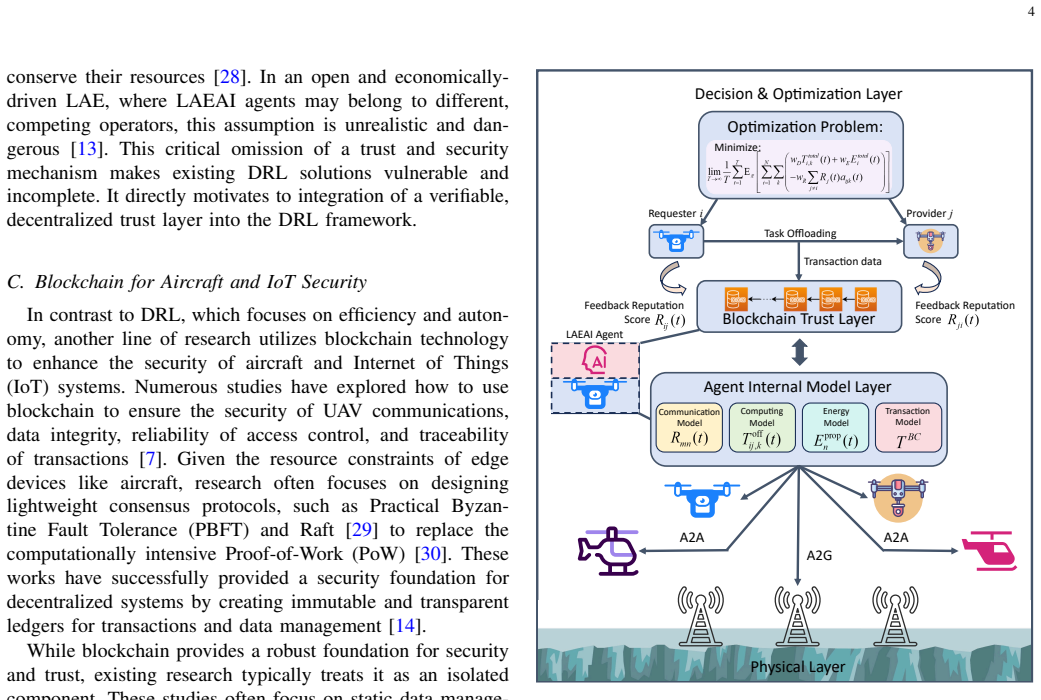
With the rapid development of the Low-Altitude Economy (LAE) ecosystem, Low-Altitude Embodied Artificial Intelligence (LAEAI) agents have become the core carriers of autonomous aerial services, thereby enabling dynamic Low-altitude Computility Networks (LACNets) for distributed computing resource sharing. However, resource-constrained LAEAI agents in decentralized LACNets face a fundamental trilemma of autonomy, security, and efficiency. Existing solutions primarily focus on either optimizing computational performance or enhancing security in isolation, failing to address the inherent trade-offs among trust, performance, and overhead in untrusted dynamic environments with malicious agents. To tackle this challenge, this paper proposes SkyChain Intelligence, a holistic framework that synergistically integrates agentic AI, consortium blockchain, and Multi-Agent Deep Reinforcement Learning (MADRL). We design a lightweight blockchain-based decentralized trust management system with a dynamic reputation mechanism and develop a hybrid-action-space MADDPG algorithm that embeds on-chain reputation scores into the reward function to jointly optimize offloading decisions, resource allocation, and drone 3D trajectories. Extensive simulations demonstrate that our framework outperforms state-of-the-art baselines in task completion latency and energy consumption, while achieving a 94.1% task completion rate in the baseline scenario and stable convergence within 300 training episodes. This work provides a viable path for building secure, autonomous, and efficient machine-to-machine computing ecosystems in the low-altitude domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes SkyChain Intelligence, a framework integrating a lightweight consortium blockchain for dynamic reputation-based trust management with a hybrid-action-space MADDPG algorithm. Reputation scores are embedded in the reward function to jointly optimize task offloading decisions, resource allocation, and 3D drone trajectories in decentralized low-altitude computility networks (LACNets). The central claim is that extensive simulations demonstrate outperformance over state-of-the-art baselines in task completion latency and energy consumption, achieving a 94.1% task completion rate in the baseline scenario with stable convergence within 300 training episodes.
Significance. If the simulation results prove robust under proper experimental controls, the integration of on-chain reputation into multi-agent DRL rewards could offer a practical approach to balancing security and efficiency in untrusted dynamic networks. However, the absence of any methodological details prevents assessment of whether this constitutes a genuine advance or merely an incremental simulation study.
major comments (2)
- [Abstract / Simulation results] Abstract and simulation results section: The manuscript asserts specific quantitative superiority (94.1% task completion rate, outperformance on latency/energy, convergence within 300 episodes) but supplies no experimental design, number of independent runs, statistical tests, baseline definitions, or error bars; the data-to-claim link cannot be evaluated.
- [Method / Reward function] Reward function and MADDPG description: Reputation scores are embedded in the reward function; without the explicit equations, training details, or ablation studies, it is impossible to determine whether the reported performance reduces to fitting of those scores or rests on independent external benchmarks.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The comments highlight important gaps in methodological transparency that we will address in the revision to allow proper evaluation of the claims.
read point-by-point responses
-
Referee: [Abstract / Simulation results] Abstract and simulation results section: The manuscript asserts specific quantitative superiority (94.1% task completion rate, outperformance on latency/energy, convergence within 300 episodes) but supplies no experimental design, number of independent runs, statistical tests, baseline definitions, or error bars; the data-to-claim link cannot be evaluated.
Authors: We agree that the simulation methodology requires substantially more detail. In the revised manuscript we will add a dedicated experimental setup subsection specifying: 10 independent runs with distinct random seeds, use of paired t-tests for significance testing against baselines, explicit parameter settings and source references for each baseline algorithm, and error bars showing mean ± standard deviation. The 94.1% figure is the mean task completion rate across those runs under the baseline scenario; we will also report the corresponding standard deviation. revision: yes
-
Referee: [Method / Reward function] Reward function and MADDPG description: Reputation scores are embedded in the reward function; without the explicit equations, training details, or ablation studies, it is impossible to determine whether the reported performance reduces to fitting of those scores or rests on independent external benchmarks.
Authors: We concur that the absence of explicit equations and training details limits assessment. The revised version will include: (i) the complete mathematical definition of the reward function r = f(performance, reputation_score, penalties), (ii) the full MADDPG architecture description (actor-critic networks, hybrid discrete-continuous action handling, centralized training with decentralized execution), (iii) all hyperparameters and training procedure, and (iv) ablation studies that isolate the reputation component from the base MADDPG and from the blockchain overhead. These additions will demonstrate that performance gains arise from the joint optimization rather than from the reputation term alone. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided abstract and context describe a proposed framework combining blockchain trust management with a MADDPG algorithm that incorporates reputation scores into rewards, with performance evaluated via simulations. No equations, derivation steps, or self-citations are quoted that reduce any claimed result (e.g., 94.1% completion rate or convergence) to its own inputs by construction. The simulation-based claims do not exhibit fitted-input-called-prediction or self-definitional patterns, and the central premise rests on external simulation benchmarks rather than internal redefinition. This is the expected honest non-finding for a methods-and-simulation paper without load-bearing circular reductions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Unauthorized uav countermeasure for low-altitude economy: Joint communications and jamming based on mimo cellular systems,
Z. Li, Z. Gao, K. Wang, Y . Mei, C. Zhu, L. Chen, X. Wu, and D. Niyato, “Unauthorized uav countermeasure for low-altitude economy: Joint communications and jamming based on mimo cellular systems,” IEEE Internet of Things Journal, vol. 12, no. 6, pp. 6659–6672, 2025
2025
-
[2]
Large language model-enhanced reinforcement learning for low-altitude economy networking,
L. Cai, R. Zhang, C. Zhao, Y . Zhang, J. Kang, D. Niyato, T. Jiang, and X. Shen, “Large language model-enhanced reinforcement learning for low-altitude economy networking,”arXiv preprint arXiv:2505.21045, 2025
arXiv 2025
-
[3]
Y . Yang, Y . Chen, J. Wang, G. Sun, and D. Niyato, “Embodied ai- empowered low altitude economy: Integrated sensing, communications, computation, and control (isc3),”arXiv preprint arXiv:2412.19996, 2024
arXiv 2024
-
[4]
Generative ai agents with large language model for satellite networks via a mixture of experts transmission,
R. Zhang, H. Du, Y . Liu, D. Niyato, J. Kang, Z. Xiong, A. Jamalipour, and D. I. Kim, “Generative ai agents with large language model for satellite networks via a mixture of experts transmission,”IEEE Journal on Selected Areas in Communications, vol. 42, no. 12, pp. 3581–3596, 2024
2024
-
[5]
Joint task offloading and resource allocation in low-altitude mec via graph attention diffusion,
Y . Xue, R. Liang, B. Yang, X. Cao, Z. Yu, M. Debbah, and C. Yuen, “Joint task offloading and resource allocation in low-altitude mec via graph attention diffusion,”IEEE Transactions on Cognitive Communi- cations and Networking, 2026
2026
-
[6]
Toward edge general intelligence with multiple-large language model (multi-llm): Architecture, trust, and orchestration,
H. Luo, Y . Liu, R. Zhang, J. Wang, G. Sun, D. Niyato, H. Yu, Z. Xiong, X. Wang, and X. Shen, “Toward edge general intelligence with multiple-large language model (multi-llm): Architecture, trust, and orchestration,”IEEE Transactions on Cognitive Communications and Networking, 2025
2025
-
[7]
Real world assets on-chain assistance low-altitude computility networks: Architecture, methodology, and challenges,
H. Luo, R. Zhang, Y . Liu, G. Sun, H. Yu, and Z. Han, “Real world assets on-chain assistance low-altitude computility networks: Architecture, methodology, and challenges,”IEEE Internet of Things Magazine, 2026
2026
-
[8]
Multi- uav enabled mec networks: Optimizing delay through intelligent 3- d trajectory planning and resource allocation,
Z. Wang, T. Wei, G. Sun, X. Liu, H. Yu, and D. Niyato, “Multi- uav enabled mec networks: Optimizing delay through intelligent 3- d trajectory planning and resource allocation,”IEEE Transactions on Intelligent Transportation Systems, 2025
2025
-
[9]
Multi-tier hybrid offload- ing for computation-aware iot applications in civil aircraft-augmented sagin,
Q. Chen, W. Meng, T. Q. Quek, and S. Chen, “Multi-tier hybrid offload- ing for computation-aware iot applications in civil aircraft-augmented sagin,”IEEE Journal on Selected Areas in Communications, vol. 41, no. 2, pp. 399–417, 2022
2022
-
[10]
Cluster-based multi- agent task scheduling for space-air-ground integrated networks,
Z. Wang, G. Sun, Y . Wang, D. Niyatoet al., “Cluster-based multi- agent task scheduling for space-air-ground integrated networks,”IEEE Transactions on Cognitive Communications and Networking, 2025
2025
-
[11]
Lameta: Intent-aware agentic network optimization via a large ai model-empowered two-stage approach,
Y . Liu, G. Liu, J. Wang, R. Zhang, D. Niyato, G. Sun, Z. Xiong, and Z. Han, “Lameta: Intent-aware agentic network optimization via a large ai model-empowered two-stage approach,”IEEE Journal on Selected Areas in Communications, 2026
2026
-
[12]
Edge large ai model agent-empowered cognitive multimodal semantic communication,
Y . Sun, Y . Liu, S. Guo, X. Qiu, J. Chen, J. Hao, and D. Niyato, 16 “Edge large ai model agent-empowered cognitive multimodal semantic communication,”IEEE Transactions on Mobile Computing, 2025
2025
-
[13]
Convergence of sym- biotic communications and blockchain for sustainable and trustworthy 6g wireless networks,
H. Luo, G. Sun, C. Chi, H. Yu, and M. Guizani, “Convergence of sym- biotic communications and blockchain for sustainable and trustworthy 6g wireless networks,”IEEE Wireless Communications, vol. 32, no. 2, pp. 18–25, 2025
2025
-
[14]
A weighted byzantine fault tolerance consensus driven trusted multi- ple large language models network,
H. Luo, G. Sun, Y . Liu, D. Zhao, D. Niyato, H. Yu, and S. Dustdar, “A weighted byzantine fault tolerance consensus driven trusted multi- ple large language models network,”IEEE Transactions on Cognitive Communications and Networking, 2025
2025
-
[15]
Real-time mixed-integer quadratic programming for vehicle decision-making and motion plan- ning,
R. Quirynen, S. Safaoui, and S. Di Cairano, “Real-time mixed-integer quadratic programming for vehicle decision-making and motion plan- ning,”IEEE Transactions on Control Systems Technology, vol. 33, no. 1, pp. 77–91, 2025
2025
-
[16]
3d placement for multi-uav relaying: An iterative gibbs-sampling and block coordinate descent optimization approach,
Z. Kang, C. You, and R. Zhang, “3d placement for multi-uav relaying: An iterative gibbs-sampling and block coordinate descent optimization approach,”IEEE Transactions on Communications, vol. 69, no. 3, pp. 2047–2062, 2020
2047
-
[17]
Federated learning via unmanned aerial vehicle,
M. Fu, Y . Shi, and Y . Zhou, “Federated learning via unmanned aerial vehicle,”IEEE Transactions on Wireless Communications, vol. 23, no. 4, pp. 2884–2900, 2023
2023
-
[18]
Maddpg-m&l: Uav-assisted joint user association and slicing resource allocation in hetnets,
G. Chen, F. Sun, H. Liang, Q. Zeng, and Y .-D. Zhang, “Maddpg-m&l: Uav-assisted joint user association and slicing resource allocation in hetnets,”IEEE Transactions on Network Science and Engineering, 2025
2025
-
[19]
Joint energy- efficient task scheduling and trajectory optimization for multi-uav mec networks in low-altitude economy,
Z. Wang, J. Chen, G. Sun, H. Yu, and M. Guizani, “Joint energy- efficient task scheduling and trajectory optimization for multi-uav mec networks in low-altitude economy,”IEEE Transactions on Cognitive Communications and Networking, 2025
2025
-
[20]
Efficient task offloading through federated learning in uav-assisted edge net- works,
V . M. R. Tummala, A. Hazra, A. Kalita, and M. Gurusamy, “Efficient task offloading through federated learning in uav-assisted edge net- works,” in2024 IEEE 99th Vehicular Technology Conference (VTC2024- Spring). IEEE, 2024, pp. 1–5
2024
-
[21]
Multi-user task offloading in uav-assisted leo satellite edge computing: A game-theoretic approach,
Y . Chen, J. Zhao, Y . Wu, J. Huang, and X. Shen, “Multi-user task offloading in uav-assisted leo satellite edge computing: A game-theoretic approach,”IEEE Transactions on Mobile Computing, vol. 24, no. 1, pp. 363–378, 2024
2024
-
[22]
Blockchain-enabled routing for zero-trust low-altitude intelligent net- works,
Z. Jia, S. He, L. Yuan, F. Zhou, Q. Wu, Z. Han, and D. Niyato, “Blockchain-enabled routing for zero-trust low-altitude intelligent net- works,”IEEE Journal on Selected Areas in Communications, 2026
2026
-
[23]
A survey of game theory in unmanned aerial vehicles communications,
M. E. Mkiramweni, C. Yang, J. Li, and W. Zhang, “A survey of game theory in unmanned aerial vehicles communications,”IEEE Communi- cations Surveys & Tutorials, vol. 21, no. 4, pp. 3386–3416, 2019
2019
-
[24]
R. Zheng, Y . Zheng, Z. Cheng, L. Luo, H. Luo, G. Sun, H. Yu, and D. Niyato, “Agentvne: Llm-augmented graph reinforcement learning for affinity-aware multi-agent placement in edge agentic ai,”arXiv preprint arXiv:2601.02021, 2026
arXiv 2026
-
[25]
Secure physical layer communications for low-altitude economy networking: A survey,
L. Cai, J. Wang, R. Zhang, Y . Zhang, T. Jiang, D. Niyato, X. Wang, A. Jamalipour, and X. Shen, “Secure physical layer communications for low-altitude economy networking: A survey,”IEEE Communications Surveys & Tutorials, 2025
2025
-
[26]
Scalable and cooperative deep reinforcement learning approaches for multi-uav systems: A systematic review,
F. Frattolillo, D. Brunori, and L. Iocchi, “Scalable and cooperative deep reinforcement learning approaches for multi-uav systems: A systematic review,”Drones, vol. 7, no. 4, p. 236, 2023
2023
-
[27]
Safe multi-agent reinforcement learning with bilevel optimization in autonomous driving,
Z. Zheng and S. Gu, “Safe multi-agent reinforcement learning with bilevel optimization in autonomous driving,”IEEE Transactions on Artificial Intelligence, vol. 6, no. 4, pp. 829–842, 2025
2025
-
[28]
Drl-based adaptive sharding for blockchain-based federated learning,
Y . Lin, Z. Gao, H. Du, J. Kang, D. Niyato, Q. Wang, J. Ruan, and S. Wan, “Drl-based adaptive sharding for blockchain-based federated learning,”IEEE Transactions on Communications, vol. 71, no. 10, pp. 5992–6004, 2023
2023
-
[29]
Symbiotic blockchain consensus: Cognitive backscatter communications-enabled wireless blockchain consensus,
H. Luo, Q. Zhang, G. Sun, H. Yu, and D. Niyato, “Symbiotic blockchain consensus: Cognitive backscatter communications-enabled wireless blockchain consensus,”IEEE/ACM Transactions on Network- ing, vol. 32, no. 6, pp. 5372–5387, 2024
2024
-
[30]
Wireless blockchain meets 6g: The future trustworthy and ubiquitous connectivity,
H. Luo, G. Sun, J. Wang, H. Yu, D. Niyato, S. Dustdar, and Z. Han, “Wireless blockchain meets 6g: The future trustworthy and ubiquitous connectivity,”IEEE Communications Surveys and Tutorials, 2025
2025
-
[31]
Blockchain-empowered lifecycle management for ai- generated content products in edge networks,
Y . Liu, H. Du, D. Niyato, J. Kang, Z. Xiong, C. Miao, X. Shen, and A. Jamalipour, “Blockchain-empowered lifecycle management for ai- generated content products in edge networks,”IEEE Wireless Commu- nications, vol. 31, no. 3, pp. 286–294, 2024
2024
-
[32]
Leveraging foundation models for multi-modal federated learning with incomplete modality,
L. Che, J. Wang, X. Liu, and F. Ma, “Leveraging foundation models for multi-modal federated learning with incomplete modality,” inJoint European Conference on Machine Learning and Knowledge Discovery in Databases. Springer, 2024, pp. 401–417
2024
-
[33]
Multimodal federated learning: A survey,
L. Che, J. Wang, Y . Zhou, and F. Ma, “Multimodal federated learning: A survey,”Sensors, vol. 23, no. 15, p. 6986, 2023
2023
-
[34]
Digital twin-driven madrl approaches for communication-computing- control co-optimization,
X. Yuan, H. Tian, X. Zhang, H. Du, N. Zhang, K. Huang, and L. Cai, “Digital twin-driven madrl approaches for communication-computing- control co-optimization,”IEEE Journal on Selected Areas in Communi- cations, 2025
2025
-
[35]
Line-of- sight probability for mmwave-based uav communications in 3d urban grid deployments,
M. Gapeyenko, D. Moltchanov, S. Andreev, and R. W. Heath, “Line-of- sight probability for mmwave-based uav communications in 3d urban grid deployments,”IEEE Transactions on Wireless Communications, vol. 20, no. 10, pp. 6566–6579, 2021
2021
-
[36]
Optimal lap altitude for maximum coverage,
A. Al-Houraniet al., “Optimal lap altitude for maximum coverage,” IEEE Wireless Communications Letters, vol. 3, no. 6, pp. 569–572, 2014
2014
-
[37]
Accurate performance analysis of reconfigurable intelligent surfaces over rician fading channels,
A. M. Salhab and M. H. Samuh, “Accurate performance analysis of reconfigurable intelligent surfaces over rician fading channels,”IEEE Wireless Communications Letters, vol. 10, no. 5, pp. 1051–1055, 2021
2021
-
[38]
Measurement-based modeling of air-to-air channels for small UA Vs in urban environments,
B. Liet al., “Measurement-based modeling of air-to-air channels for small UA Vs in urban environments,”IEEE Internet of Things Journal, vol. 9, no. 17, pp. 16 321–16 332, 2022
2022
-
[39]
Wireless communications with unmanned aerial vehicles: Opportunities and challenges,
Y . Zenget al., “Wireless communications with unmanned aerial vehicles: Opportunities and challenges,”IEEE Communications magazine, vol. 54, no. 5, pp. 36–42, 2016
2016
-
[40]
Deep rein- forcement learning based 3d-trajectory design and task offloading in uav-enabled mec system,
C. Liu, Y . Zhong, R. Wu, S. Ren, S. Du, and B. Guo, “Deep rein- forcement learning based 3d-trajectory design and task offloading in uav-enabled mec system,”IEEE Transactions on Vehicular Technology, vol. 74, no. 2, pp. 3185–3195, 2025
2025
-
[41]
Goldsmith,Wireless Communications
A. Goldsmith,Wireless Communications. Cambridge University Press, 2005
2005
-
[42]
A cross-layer defense method for blockchain empowered cbtc systems against data tampering attacks,
H. Liang, L. Zhu, F. R. Yu, and X. Wang, “A cross-layer defense method for blockchain empowered cbtc systems against data tampering attacks,” IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 1, pp. 501–515, 2022
2022
-
[43]
Bcmaster: A compatible framework for comprehensively analyzing and monitoring blockchain systems in iot,
Y . Liu, K. Qian, K. Wang, and L. He, “Bcmaster: A compatible framework for comprehensively analyzing and monitoring blockchain systems in iot,”IEEE Internet of Things Journal, vol. 9, no. 22, pp. 22 529–22 546, 2022
2022
-
[44]
Flet: Game- theoretic free-riding mitigation via test tasks in federated learning,
S. Guo, Y . Wang, Z. Su, Y . Pan, T. H. Luan, and X. Luo, “Flet: Game- theoretic free-riding mitigation via test tasks in federated learning,”IEEE Transactions on Networking, 2026
2026
-
[45]
Hybrid event-triggeredH∞ control for networked control systems under denial of service attacks,
Y .-L. Zhi, Z. Nie, X. Liu, and S. He, “Hybrid event-triggeredH∞ control for networked control systems under denial of service attacks,” IEEE Transactions on Network Science and Engineering, 2025
2025
-
[46]
X. Gao, Y . Wang, B. Liu, X. Zhou, R. Zhang, J. Wang, D. Niyato, D. I. Kim, A. Jamalipour, C. Yuenet al., “Agentic satellite-augmented low-altitude economy and terrestrial networks: A survey on generative approaches,”arXiv preprint arXiv:2507.14633, 2025
arXiv 2025
-
[47]
Toward agentic ai: generative information retrieval inspired intelligent communications and networking,
R. Zhang, S. Tang, Y . Liu, D. Niyato, Z. Xiong, S. Sun, S. Mao, and Z. Han, “Toward agentic ai: generative information retrieval inspired intelligent communications and networking,”IEEE Communications Magazine, 2026
2026
-
[48]
A collaborative multi-agent deep reinforcement learning-based wireless power allocation with centralized training and decentralized execution,
A. Kopic, E. Perenda, and H. Gacanin, “A collaborative multi-agent deep reinforcement learning-based wireless power allocation with centralized training and decentralized execution,”IEEE Transactions on Communi- cations, vol. 72, no. 11, pp. 7006–7016, 2024
2024
-
[49]
Parameter identification algorithm for fir systems with quantized inputs and binary outputs under data tampering attacks,
R. Jia, P. Yu, F.-W. Jing, and J. Guo, “Parameter identification algorithm for fir systems with quantized inputs and binary outputs under data tampering attacks,”IEEE Transactions on Instrumentation and Mea- surement, vol. 73, pp. 1–12, 2024
2024
-
[50]
Toward free-riding attack on cross-silo federated learning through evolutionary game,
T. Chen, F. Wang, W. Qiu, Q. Zhang, Z. Xiong, and Z. Zheng, “Toward free-riding attack on cross-silo federated learning through evolutionary game,” in2024 IEEE 44th International Conference on Distributed Computing Systems (ICDCS). IEEE, 2024, pp. 869–880
2024
-
[51]
Denial of service attacks in edge computing layers: Taxonomy, vulnerabilities, threats and solutions,
R. Uddin, S. A. Kumar, and V . Chamola, “Denial of service attacks in edge computing layers: Taxonomy, vulnerabilities, threats and solutions,” Ad Hoc Networks, vol. 152, p. 103322, 2024
2024
-
[52]
Task assignment and exploration optimization for low altitude uav rescue via generative ai enhanced multi-agent reinforcement learning,
X. Tang, Q. Chen, W. Weng, C. Jin, Z. Liu, J. Wang, G. Sun, X. Li, and D. Niyato, “Task assignment and exploration optimization for low altitude uav rescue via generative ai enhanced multi-agent reinforcement learning,”IEEE Transactions on Mobile Computing, vol. 25, no. 1, pp. 627–643, 2026
2026
-
[53]
Trusted routing for blockchain-empowered uav networks via multi-agent deep reinforcement learning,
Z. Jia, S. He, Q. Zhu, W. Wang, Q. Wu, and Z. Han, “Trusted routing for blockchain-empowered uav networks via multi-agent deep reinforcement learning,”IEEE Transactions on Communications, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.