Importance of Intent-Sharing for V2X-based Maneuver Coordination
Pith reviewed 2026-06-25 22:14 UTC · model grok-4.3
The pith
Direct intent sharing substantially improves successful maneuver coordinations compared to kinematic prediction alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Our analysis demonstrates in two scenarios substantial improvements in maneuver coordination when CAVs have direct access to the nearby vehicles' driving intentions through intent sharing. These findings highlight the importance of including intent-sharing in the maneuver coordination protocol.
What carries the argument
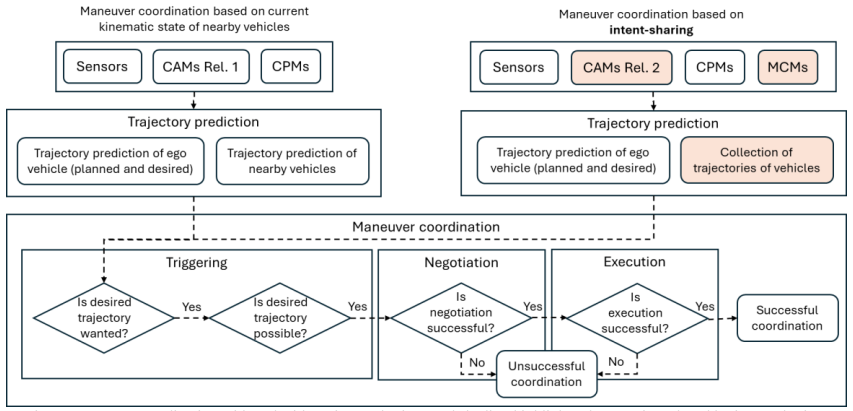
The direct comparison of intent-sharing (remote vehicles communicate their plans) against trajectory prediction based solely on current kinematic data, applied to coordinated lane changes.
If this is right
- Higher percentages of successful lane-change coordinations occur when plans are shared directly.
- Maneuver coordination effectiveness rises in highway scenarios once vehicles know remote driving intentions.
- Protocols for V2X-based coordination must transmit intent information rather than relying on inference alone.
- Accurate knowledge of other vehicles' plans becomes a prerequisite for reliable automated coordination.
Where Pith is reading between the lines
- Standards bodies could prioritize message formats that carry planned trajectories over relying on prediction modules.
- The same intent-sharing advantage may appear in merging, intersection, or platoon maneuvers beyond the lane-change case studied.
- Systems that combine modest prediction with intent sharing could reach coordination reliability with lower communication overhead than either method alone.
Load-bearing premise
A trajectory predictor that uses only current kinematic data serves as a representative baseline for what real-world V2X systems can accomplish without receiving explicit intent messages.
What would settle it
A follow-up simulation or field test that equips the ego vehicle with a more sophisticated kinematic-only predictor yet still records no gain in coordination success when intent messages are added.
Figures
read the original abstract
This paper examines the critical role of intent-sharing in enabling effective maneuver coordination for connected and automated vehicles (CAVs). Successful maneuver coordinations require vehicles to accurately know other vehicles' driving intentions. Intent-sharing can be achieved by the remote vehicles directly communicating their plans with the ego vehicle, as opposed to the ego vehicle predicting the trajectory on the remote vehicles' behalf. In this paper, we investigate the potential of intent-sharing on maneuver coordination effectiveness by quantifying the percentage of successful coordinations. We analyze the potential of intent-sharing by comparing its effectiveness for coordinated lane changes in a highway scenario with the effectiveness of a trajectory prediction method based on current kinematic data. Our analysis demonstrates in two scenarios substantial improvements in maneuver coordination when CAVs have direct access to the nearby vehicles' driving intentions through intent sharing. These findings highlight the importance of including intent-sharing in the maneuver coordination protocol.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper examines the role of intent-sharing in V2X maneuver coordination for CAVs. It compares direct communication of driving intentions against a trajectory-prediction baseline that relies solely on current kinematic data, claiming that intent-sharing yields substantial improvements in the percentage of successful coordinated lane changes in two highway scenarios.
Significance. If the quantitative results hold under a stronger baseline, the work would usefully highlight a concrete protocol-level requirement for V2X systems: that maneuver-coordination messages must carry explicit intent rather than relying on inference from kinematics alone. The simulation approach is a direct way to quantify coordination success, which is a strength for an applied networking paper.
major comments (2)
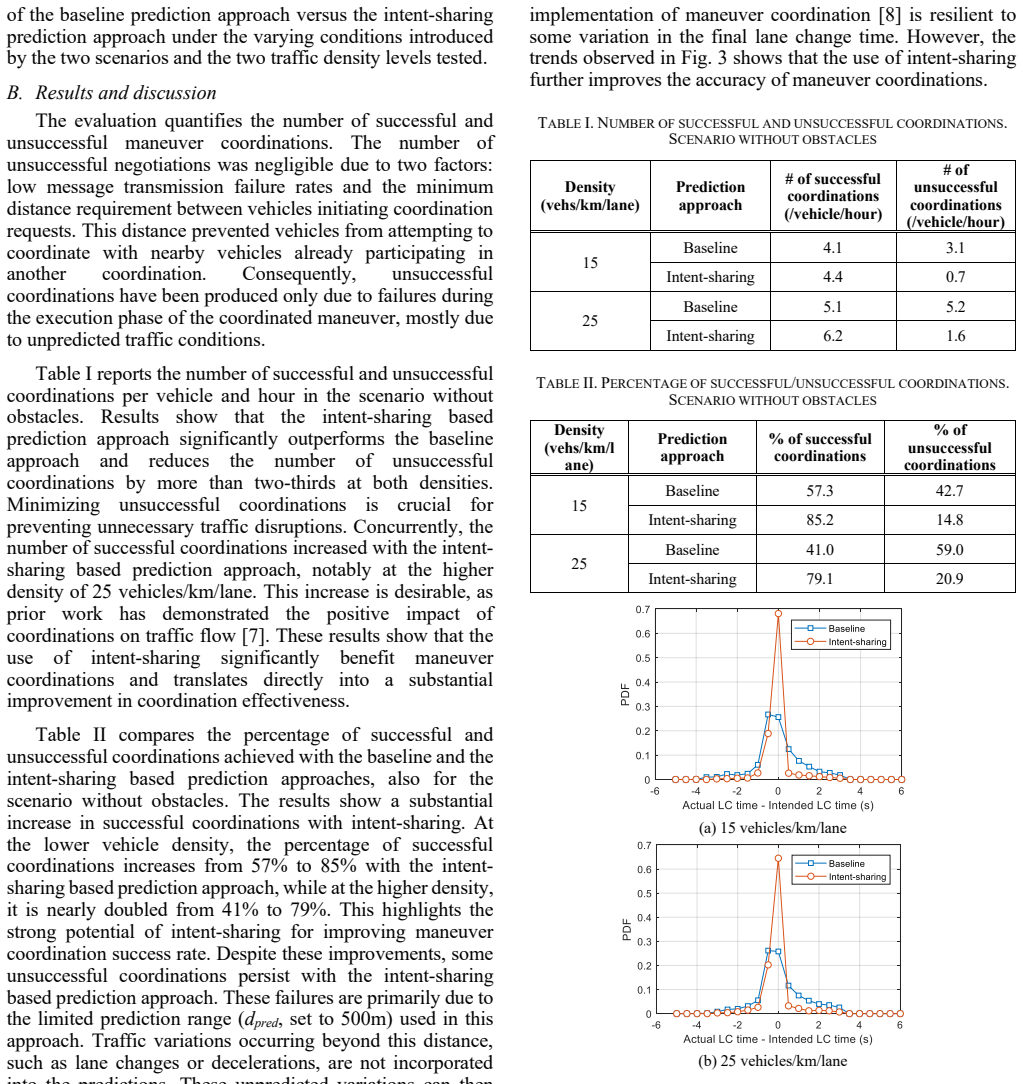
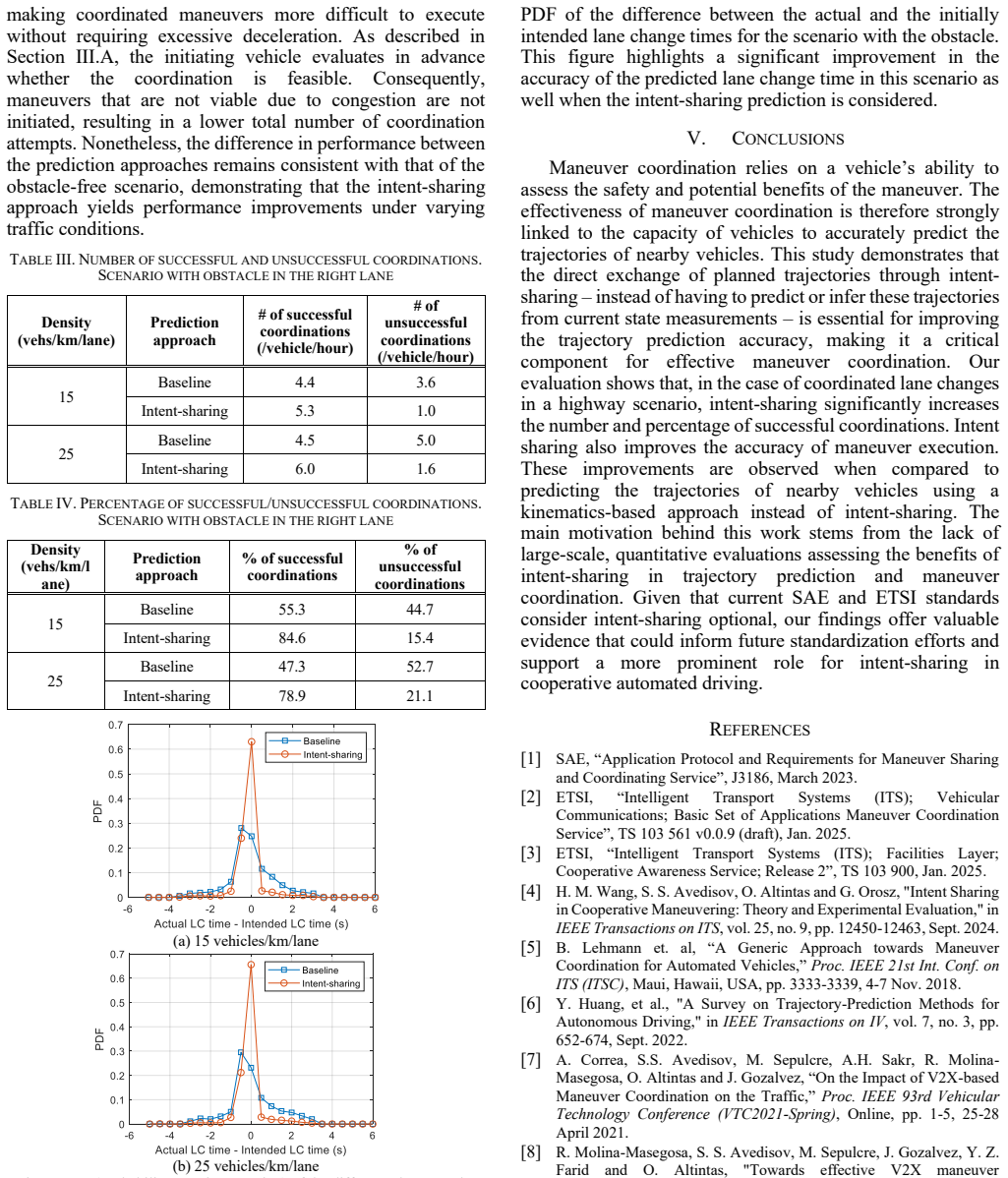
- [Abstract] Abstract and simulation-results section: the central claim of 'substantial improvements' is stated without any success-rate percentages, coordination-success definition, simulation parameters, or error metrics for the kinematic predictor. This prevents verification of the reported delta and directly affects the soundness of the headline result.
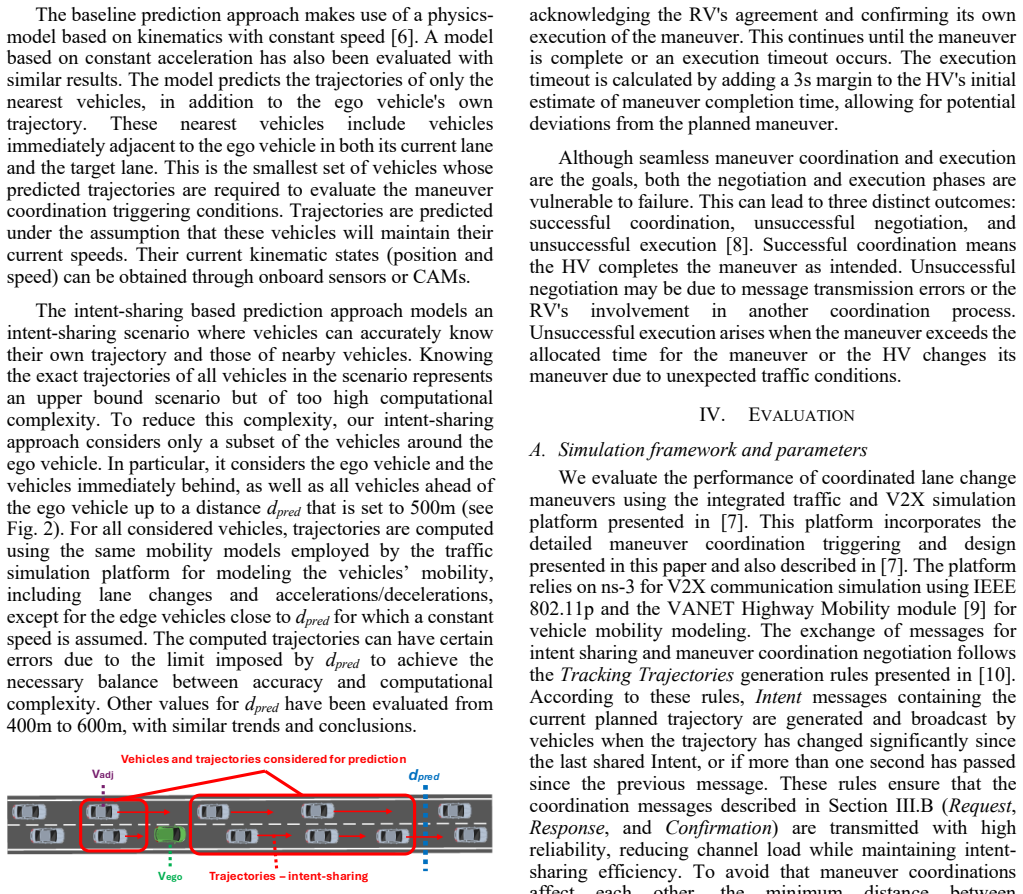
- [Simulation setup] Simulation setup (trajectory-prediction baseline): the comparator is described only as 'based on current kinematic data.' No detail is given on the extrapolation rule (constant velocity, constant acceleration, filtering, or history length), so it is impossible to judge whether the baseline is representative of production V2X predictors; any non-trivial predictor would shrink the measured gain.
minor comments (1)
- The two scenarios are mentioned but not labeled or described; adding a short table or figure caption that distinguishes them would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, indicating revisions where the manuscript will be updated for greater clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract and simulation-results section: the central claim of 'substantial improvements' is stated without any success-rate percentages, coordination-success definition, simulation parameters, or error metrics for the kinematic predictor. This prevents verification of the reported delta and directly affects the soundness of the headline result.
Authors: We agree that the abstract would benefit from explicit quantitative details to allow verification of the improvements. In the revised version, we will update the abstract to report the specific success-rate percentages for coordinated lane changes in the two scenarios, the definition used for a successful coordination, key simulation parameters (e.g., speeds, densities, communication range), and the error metrics applied to the kinematic predictor. Corresponding details will also be emphasized in the simulation-results section. revision: yes
-
Referee: [Simulation setup] Simulation setup (trajectory-prediction baseline): the comparator is described only as 'based on current kinematic data.' No detail is given on the extrapolation rule (constant velocity, constant acceleration, filtering, or history length), so it is impossible to judge whether the baseline is representative of production V2X predictors; any non-trivial predictor would shrink the measured gain.
Authors: The referee is correct that the baseline description lacks necessary specifics. Our implementation uses instantaneous constant-velocity extrapolation from the latest position and velocity values, with no filtering, acceleration model, or history window. We will expand the simulation-setup section to document this rule fully, including all parameters and assumptions. We will also note that while a more advanced predictor could narrow the gap, the chosen baseline serves to isolate the value of explicit intent over minimal kinematic inference; we will discuss this as a limitation and potential direction for future work. revision: yes
Circularity Check
No circularity; simulation comparison with no derivations or fitted predictions
full rationale
The paper is a comparative simulation study that quantifies successful maneuver coordination percentages under intent-sharing versus a kinematic-data baseline. No equations, parameter fits, uniqueness theorems, or self-citations are invoked to derive results; the central claim is an empirical delta from two simulation scenarios. This matches the default non-circular case for simulation work whose inputs (scenarios, coordination rules) are not redefined by the outputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Application Protocol and Requirements for Maneuver Sharing and Coordinating Service
SAE, “Application Protocol and Requirements for Maneuver Sharing and Coordinating Service”, J3186, March 2023
2023
-
[2]
Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications Maneuver Coordination Service
ETSI, “ Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications Maneuver Coordination Service”, TS 103 561 v0.0.9 (draft), Jan. 2025
2025
-
[3]
Intelligent Transport Systems (ITS); Facilities Layer; Cooperative Awareness Service; Release 2
ETSI, “Intelligent Transport Systems (ITS); Facilities Layer; Cooperative Awareness Service; Release 2”, TS 103 900, Jan. 2025
2025
-
[4]
Intent Sharing in Cooperative Maneuvering: Theory and Experimental Evaluation,
H. M. Wang, S. S. Avedisov, O. Altintas and G. Orosz, "Intent Sharing in Cooperative Maneuvering: Theory and Experimental Evaluation," in IEEE Transactions on ITS, vol. 25, no. 9, pp. 12450-12463, Sept. 2024
2024
-
[5]
A Generic Approach towards Maneuver Coordination for Automated Vehicles,
B. Lehmann et. al , “A Generic Approach towards Maneuver Coordination for Automated Vehicles,” Proc. IEEE 21st Int. Conf. on ITS (ITSC), Maui, Hawaii, USA, pp. 3333-3339, 4-7 Nov. 2018
2018
-
[6]
A Survey on Trajectory -Prediction Methods for Autonomous Driving,
Y. Huang, et al. , "A Survey on Trajectory -Prediction Methods for Autonomous Driving," in IEEE Transactions on IV, vol. 7, no. 3, pp. 652-674, Sept. 2022
2022
-
[7]
On the Impact of V2X -based Maneuver Coordination on the Traffic,
A. Correa, S.S. Avedisov, M. Sepulcre, A.H. Sakr, R. Molina - Masegosa, O. Altintas and J. Gozalvez, “On the Impact of V2X -based Maneuver Coordination on the Traffic,” Proc. IEEE 93rd Vehicular Technology Conference (VTC2021 -Spring), Online, pp. 1 -5, 25 -28 April 2021
2021
-
[8]
Towards effective V2X maneuver coordinations: state machine, challenges and countermeasures,
R. Molina-Masegosa, S. S. Avedisov, M. Sepulcre, J. Gozalvez , Y. Z. Farid and O. Altintas, "Towards effective V2X maneuver coordinations: state machine, challenges and countermeasures," 2024 IEEE 100th Vehicular Technology Conference (VTC2024 -Fall), Washington, DC, USA, 2024
2024
-
[9]
Highway Mobility and Vehicular Ad-Hoc Networks in ns-3,
H. Arbabi and Michele C. Weigle, “Highway Mobility and Vehicular Ad-Hoc Networks in ns-3,” Proc. of the Winter Simulation Conference. Baltimore, MD, USA, pp. 2991-3003, 5-8 Dec. 2010
2010
-
[10]
V2X Communications for Maneuver Coordination in Connected Automated Driving: Message Generation Rules,
R. Molina-Masegosa, S. S. Avedisov, M. Sepulcre, Y. Z. Farid, J. Gozalvez and O. Altintas, "V2X Communications for Maneuver Coordination in Connected Automated Driving: Message Generation Rules," in IEEE Vehicular Technology Magazine, vol. 18, no. 3, pp. 91-100, Sept. 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.