PDS Joint: A Parametric Double-Spiral Joint Tailored for Dexterous Hands
Pith reviewed 2026-06-26 00:05 UTC · model grok-4.3
The pith
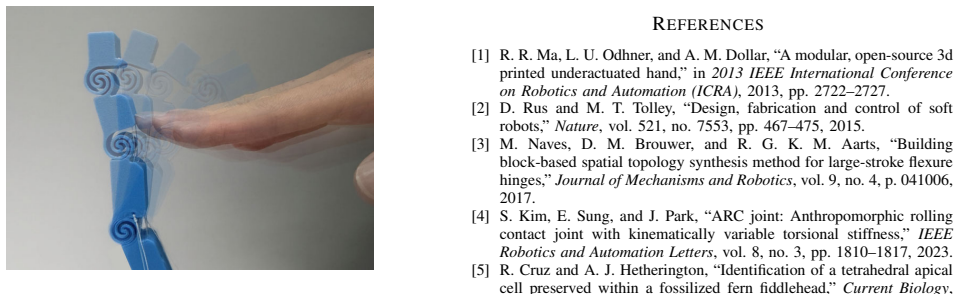
The PDS joint is a parametric double-spiral compliant joint that systematically shapes directional stiffness across flexion, abduction, and pronation modes in dexterous hands while enabling accurate proprioception via learned inductive sens
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
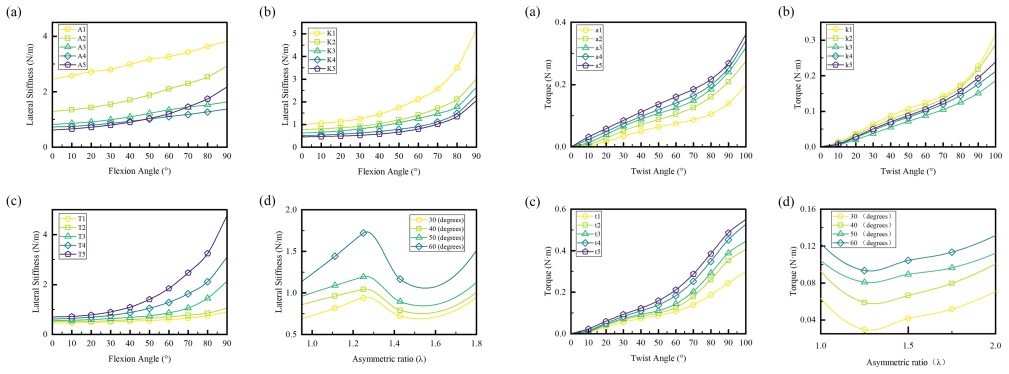
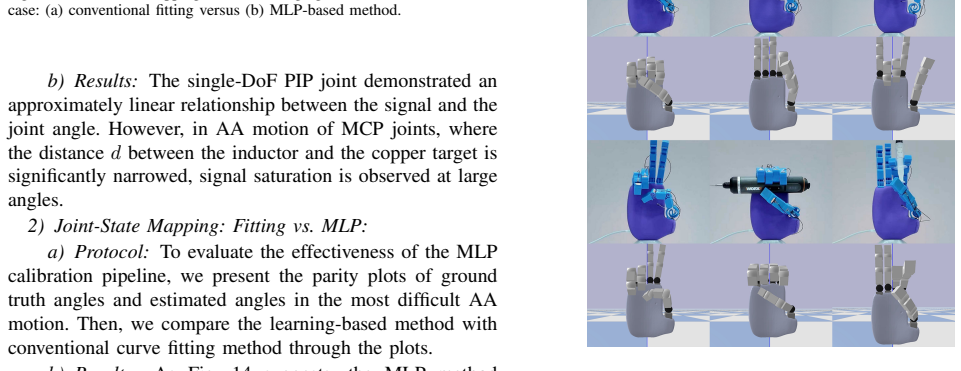
The PDS joint enables systematic shaping of directional stiffness across multiple deformation modes including flexion/extension, abduction/adduction, and pronation/supination through the use of Archimedean and logarithmic spiral templates combined with an asymmetry ratio parameter. Experiments show non-monotonic dependence of lateral support on asymmetry, and a learned MLP mapping for inductive proprioception reduces estimation error by 41.6% versus curve fitting for abduction/adduction motion. The joints are demonstrated in an open-source dexterous hand performing grasps and contact-rich interactions.
What carries the argument
The parametric double-spiral (PDS) joint structure, which uses spiral templates and an asymmetry ratio to control stiffness distributions in multiple deformation modes.
If this is right
- The joint allows tailoring for grasp stability and hyperextension resistance via the asymmetry parameter.
- Stiffness landscapes vary with geometric parameters, requiring principled tuning due to non-monotonic effects.
- Inductive sensors co-designed with the joint provide reliable state estimation under large deformation when calibrated with MLP.
- The design integrates into full dexterous hands for object grasping and safe human interactions.
Where Pith is reading between the lines
- The spiral-based parametric approach may reduce reliance on iterative physical prototyping for compliant mechanisms.
- Similar asymmetry tuning could be applied to other multi-mode compliant devices beyond hands.
- The learning-based calibration pipeline might be adapted for different sensing modalities or joint geometries.
- Non-monotonic stiffness behavior suggests that optimal parameters may need to be found through systematic search rather than simple scaling.
Load-bearing premise
That combining Archimedean and logarithmic spirals with one asymmetry ratio parameter can produce the desired non-monotonic lateral support and reliable proprioception without needing extra geometric tweaks or accounting for material effects.
What would settle it
An experiment measuring lateral support stiffness at varying asymmetry ratios that fails to show the non-monotonic dependence, or repeated trials where the MLP does not achieve the reported error reduction for abduction/adduction.
Figures


read the original abstract
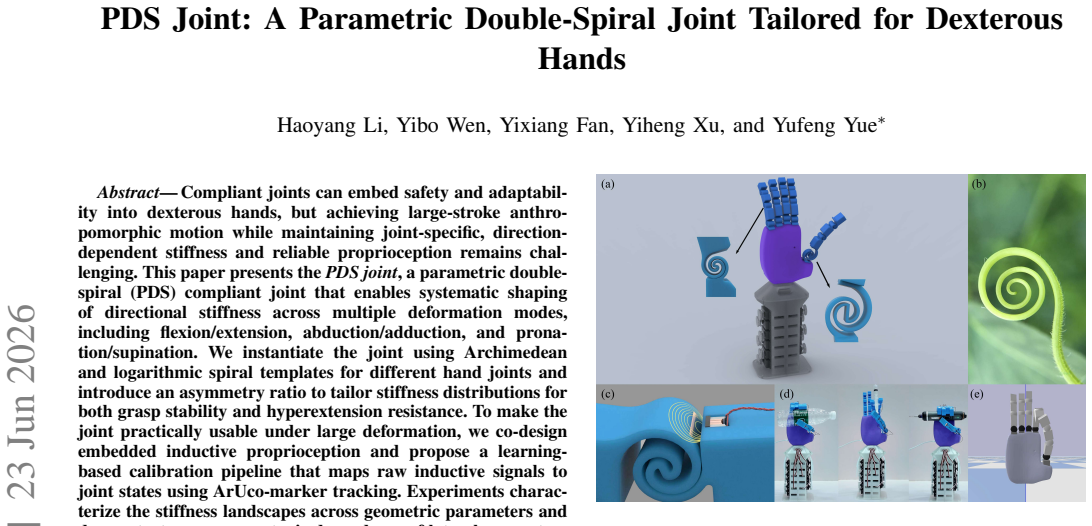
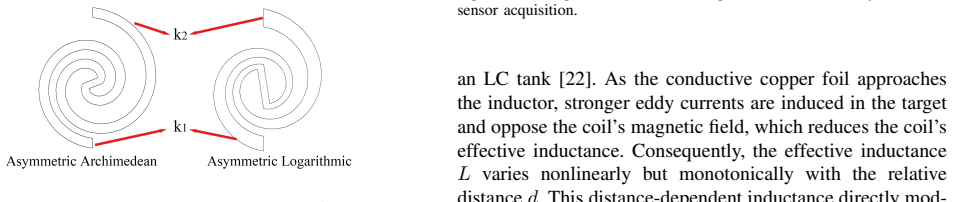
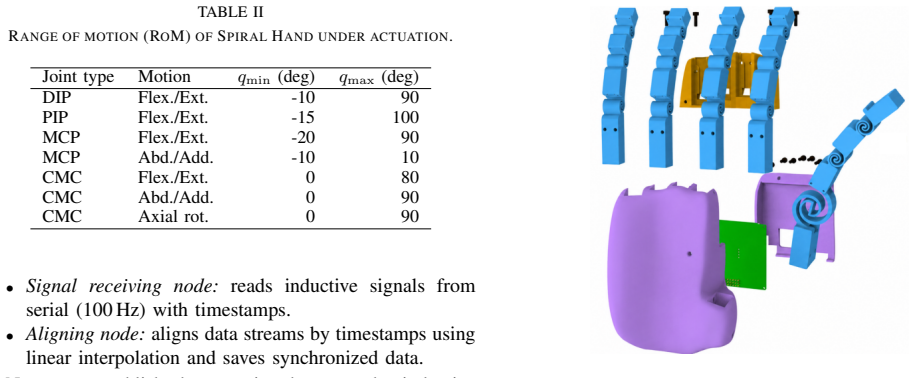
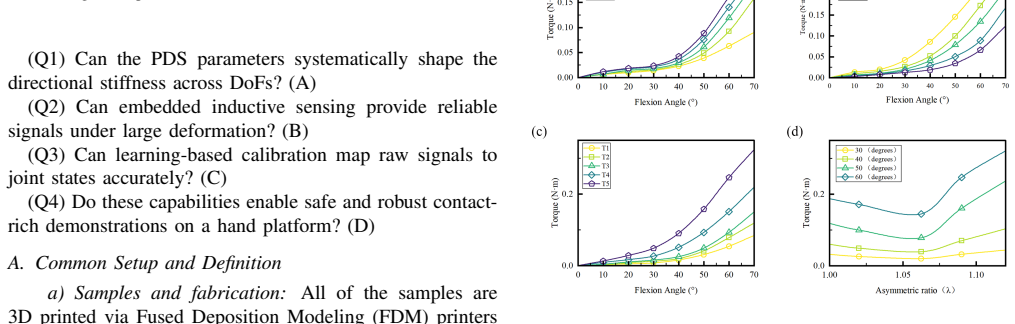
Compliant joints can embed safety and adaptability into dexterous hands, but achieving large-stroke anthropomorphic motion while maintaining joint-specific, directiondependent stiffness and reliable proprioception remains challenging. This paper presents the PDS joint, a parametric doublespiral (PDS) compliant joint that enables systematic shaping of directional stiffness across multiple deformation modes, including flexion/extension, abduction/adduction, and pronation/supination. We instantiate the joint using Archimedean and logarithmic spiral templates for different hand joints and introduce an asymmetry ratio to tailor stiffness distributions for both grasp stability and hyperextension resistance. To make the joint practically usable under large deformation, we co-design embedded inductive proprioception and propose a learningbased calibration pipeline that maps raw inductive signals to joint states using ArUco-marker tracking. Experiments characterize the stiffness landscapes across geometric parameters and demonstrate a non-monotonic dependence of lateral support on asymmetry, indicating the importance of principled parameter tuning. For joint-state estimation in the most challenging abduction/adduction motion, a learned multilayer-perceptron (MLP) mapping reduces the error compared with conventional curve fitting by 41.6%. Finally, we integrate the proposed joints into an open-source dexterous hand as a demonstration platform, on which the hand grasps a set of nine everyday objects and performs safe, contact-rich human-involved interactions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the PDS joint, a parametric double-spiral compliant joint for dexterous hands that uses Archimedean and logarithmic spiral templates assigned to different joints together with a single asymmetry ratio parameter. The design aims to enable systematic, direction-dependent stiffness shaping across flexion/extension, abduction/adduction, and pronation/supination while embedding inductive proprioception. A learning-based MLP calibration is proposed to map raw signals to joint states, reported to reduce error by 41.6% versus curve fitting in abduction/adduction. Stiffness landscapes are characterized experimentally, showing non-monotonic lateral support versus asymmetry, and the joints are integrated into an open-source hand for grasping and contact-rich tasks.
Significance. If the central claims hold, the work supplies a concrete parametric template for embedding tunable, multi-axis stiffness into compliant joints without additional actuators, which would be a useful addition to the soft-robotics and dexterous-hand literature. The co-design of inductive sensing with an MLP pipeline and the open-source hand platform are practical strengths that could support reproducibility and follow-on work. The reported non-monotonic dependence on the asymmetry ratio, if statistically robust, would also highlight the value of principled geometric tuning over ad-hoc adjustment.
major comments (2)
- [Abstract] Abstract and experimental results: the 41.6% error reduction for the MLP in abduction/adduction is presented without error bars, sample sizes, details on data exclusion criteria, or cross-validation procedure; these omissions are load-bearing for the claim that the learned mapping reliably outperforms conventional fitting under large deformation.
- [Design] Design and characterization sections: the central claim that a single asymmetry ratio plus the two spiral templates produces independent, systematic stiffness control across the three rotational modes rests on experimental observation of non-monotonic lateral support; no derivation or stiffness-tensor analysis is supplied showing how the geometry decouples the axes a priori, leaving open the possibility that observed independence is joint-specific rather than a general parametric principle.
minor comments (1)
- [Abstract] The abstract contains the compound word "doublespiral" without a hyphen or space; consistent terminology would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract and experimental results: the 41.6% error reduction for the MLP in abduction/adduction is presented without error bars, sample sizes, details on data exclusion criteria, or cross-validation procedure; these omissions are load-bearing for the claim that the learned mapping reliably outperforms conventional fitting under large deformation.
Authors: We agree that the presentation of the 41.6% error reduction lacks necessary statistical details. In the revised version we will report error bars, sample sizes, data exclusion criteria, and the cross-validation procedure for the MLP calibration to substantiate the claim. revision: yes
-
Referee: [Design] Design and characterization sections: the central claim that a single asymmetry ratio plus the two spiral templates produces independent, systematic stiffness control across the three rotational modes rests on experimental observation of non-monotonic lateral support; no derivation or stiffness-tensor analysis is supplied showing how the geometry decouples the axes a priori, leaving open the possibility that observed independence is joint-specific rather than a general parametric principle.
Authors: The manuscript relies on experimental characterization to demonstrate the effects of the parametric choices. We acknowledge that an a priori stiffness-tensor derivation is absent. We will add a concise geometric explanation in the design section describing how the spiral templates and asymmetry ratio influence directional stiffness, while clarifying that the observed decoupling is supported by the multi-parameter experiments rather than claimed as fully general without further analysis. revision: partial
Circularity Check
No significant circularity; design and empirical validation are self-contained.
full rationale
The paper introduces a parametric double-spiral joint geometry using Archimedean and logarithmic templates plus an asymmetry ratio, then reports experimental stiffness measurements and an MLP calibration for proprioception. No load-bearing equations, derivations, or predictions are presented that reduce reported stiffness landscapes, non-monotonic behaviors, or the 41.6% error reduction to quantities defined by the asymmetry ratio or other fitted inputs. The central claims rest on geometric instantiation, fabrication, and direct measurement rather than self-definition, fitted-input predictions, or self-citation chains. This is the expected outcome for a primarily design-plus-experiment robotics paper.
Axiom & Free-Parameter Ledger
free parameters (1)
- asymmetry ratio
axioms (1)
- domain assumption Archimedean and logarithmic spiral templates can be used to instantiate joints with controllable directional stiffness across flexion, abduction, and pronation modes
Reference graph
Works this paper leans on
-
[1]
A modular, open-source 3d printed underactuated hand,
R. R. Ma, L. U. Odhner, and A. M. Dollar, “A modular, open-source 3d printed underactuated hand,” in2013 IEEE International Conference on Robotics and Automation (ICRA), 2013, pp. 2722–2727
2013
-
[2]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,”Nature, vol. 521, no. 7553, pp. 467–475, 2015
2015
-
[3]
Building block-based spatial topology synthesis method for large-stroke flexure hinges,
M. Naves, D. M. Brouwer, and R. G. K. M. Aarts, “Building block-based spatial topology synthesis method for large-stroke flexure hinges,”Journal of Mechanisms and Robotics, vol. 9, no. 4, p. 041006, 2017
2017
-
[4]
ARC joint: Anthropomorphic rolling contact joint with kinematically variable torsional stiffness,
S. Kim, E. Sung, and J. Park, “ARC joint: Anthropomorphic rolling contact joint with kinematically variable torsional stiffness,”IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1810–1817, 2023
2023
-
[5]
Identification of a tetrahedral apical cell preserved within a fossilized fern fiddlehead,
R. Cruz and A. J. Hetherington, “Identification of a tetrahedral apical cell preserved within a fossilized fern fiddlehead,”Current Biology, vol. 35, no. 2, pp. 383–390.e2, 2025
2025
-
[6]
The adaptive value of young leaves being tightly folded or rolled on monocotyledons in tropical lowland rain forest: an hypothesis in two parts,
P. J. Grubb and R. V . Jackson, “The adaptive value of young leaves being tightly folded or rolled on monocotyledons in tropical lowland rain forest: an hypothesis in two parts,”Plant Ecology, vol. 192, pp. 317–327, 2007
2007
-
[7]
Double-spiral: a bioinspired pre-programmable compliant joint with multiple degrees of freedom,
M. Jafarpour, S. Gorb, and H. Rajabi, “Double-spiral: a bioinspired pre-programmable compliant joint with multiple degrees of freedom,” Journal of the Royal Society Interface, vol. 20, p. 20220757, 2023
2023
-
[8]
Double-spiral as a bio-inspired functional element in engineering design,
M. Jafarpour, M. Aryayi, S. N. Gorb, and H. Rajabi, “Double-spiral as a bio-inspired functional element in engineering design,”Scientific Reports, vol. 14, p. 29225, 2024
2024
-
[9]
Spatially distributed biomimetic compliance enables robust anthropomorphic robotic manipulation,
K. Junge and J. Hughes, “Spatially distributed biomimetic compliance enables robust anthropomorphic robotic manipulation,”Communica- tions Engineering, vol. 4, no. 1, p. 76, 2025
2025
-
[10]
Review of flexible/stretchable sensors for soft robot,
K. Suzumori and H. Nabae, “Review of flexible/stretchable sensors for soft robot,”Journal of Robotics and Mechatronics, vol. 37, no. 1, pp. 8–12, 2025
2025
-
[11]
Hybrid magnetic–inductive angular sensor with 360 ◦ range and stray-field immunity,
B. Brajon, L. Lugani, and G. Close, “Hybrid magnetic–inductive angular sensor with 360 ◦ range and stray-field immunity,”Sensors, vol. 22, no. 6, p. 2153, 2022
2022
-
[12]
Inductive sensing design guide (an219207),
Infineon Technologies, “Inductive sensing design guide (an219207),” Infineon Technologies, Tech. Rep., 2024, application note
2024
-
[13]
High-resolution low latency and low-power absolute inductive angle encoder reference design (TIDA-010961),
Texas Instruments, “High-resolution low latency and low-power absolute inductive angle encoder reference design (TIDA-010961),” Texas Instruments, Tech. Rep., 2025, Design Guide, released Sep 23,
2025
-
[14]
Available: https://www.ti.com/tool/TIDA-010961
[Online]. Available: https://www.ti.com/tool/TIDA-010961
-
[15]
3d- printed flexure-based finger joints for anthropomorphic hands,
L. A. Garcia Rodriguez, M. Naves, and D. M. Brouwer, “3d- printed flexure-based finger joints for anthropomorphic hands,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 1437–1442
2018
-
[16]
Compliant joint actuator with dual spiral springs,
Y . Kim, J. Lee, and J. Park, “Compliant joint actuator with dual spiral springs,”IEEE/ASME Transactions on Mechatronics, vol. 18, no. 6, pp. 1839–1844, 2013
2013
-
[17]
Study on the large-displacement behaviour of a spiral spring with variations of cross-section, orthotropy and prestress,
G. Radaelli and J. L. Herder, “Study on the large-displacement behaviour of a spiral spring with variations of cross-section, orthotropy and prestress,”Mechanical Sciences, vol. 9, pp. 337–348, 2018
2018
-
[18]
Minimal sensing approach of an underactuated flexure based gripper for agri-food applications,
J. Korenblik, “Minimal sensing approach of an underactuated flexure based gripper for agri-food applications,” M.Sc. Thesis, University of Twente, Aug. 2021
2021
-
[19]
Shielded soft force sensors,
B. Aksoy, Y . Hao, G. Grasso, K. M. Digumarti, V . Cacucciolo, and H. Shea, “Shielded soft force sensors,”Nature Communications, vol. 13, no. 1, p. 4649, 2022
2022
-
[20]
Inductive position sensors,
Renesas Electronics, “Inductive position sensors,” Product page, 2026, accessed 2026-03-06. [Online]. Available: https://www.renesas. com/en/products/sensor-products/inductive-position-sensors
2026
-
[21]
Automatic generation and detection of highly reliable fiducial markers under occlusion,
S. Garrido-Jurado, R. Mu ˜noz-Salinas, F. J. Madrid-Cuevas, and M. J. Mar´ın-Jim´enez, “Automatic generation and detection of highly reliable fiducial markers under occlusion,”Pattern Recognition, vol. 47, no. 6, pp. 2280–2292, 2014
2014
-
[22]
LDC1612, LDC1614: Multi-channel 28-bit induc- tance to digital converter (ldc) for inductive sensing, datasheet (rev. a),
Texas Instruments, “LDC1612, LDC1614: Multi-channel 28-bit induc- tance to digital converter (ldc) for inductive sensing, datasheet (rev. a),” https://www.ti.com/product/LDC1614, 2018, accessed 2026-03-03
2018
-
[23]
A soft inductive bi- modal sensor for proprioception and tactile sensing of soft machines,
Y . Peng, H. Wu, Z. Wang, Y . Wang, and H. Wang, “A soft inductive bi- modal sensor for proprioception and tactile sensing of soft machines,” Soft Robotics, vol. 11, no. 6, pp. 1055–1067, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.