Distributed SDN-Based Communication Architecture for the Pods4Rail System
Pith reviewed 2026-06-25 19:15 UTC · model grok-4.3
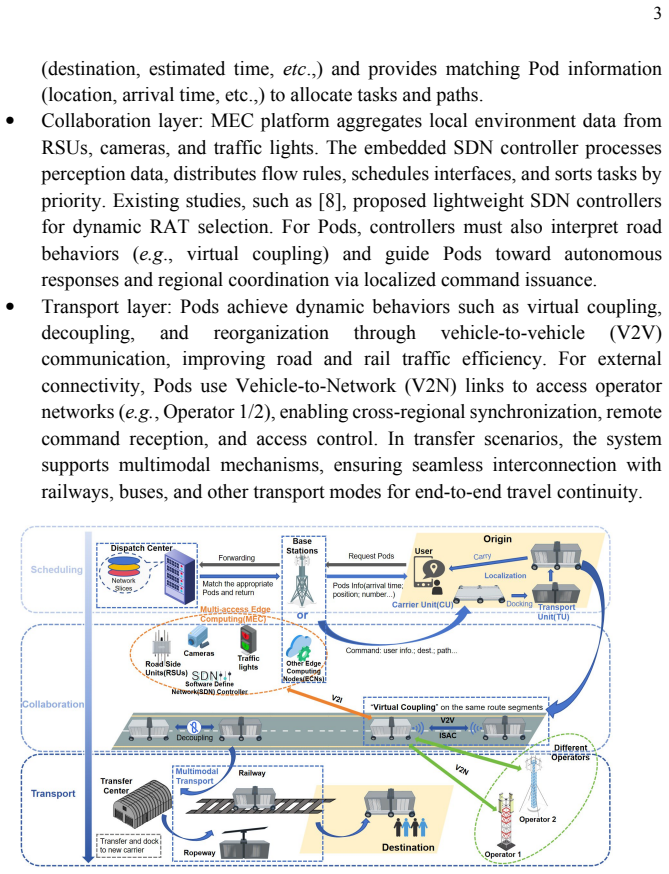
The pith
A distributed SDN architecture with regional and edge controllers achieves lower controller communication and flow setup latency for Pods4Rail than literature reports.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
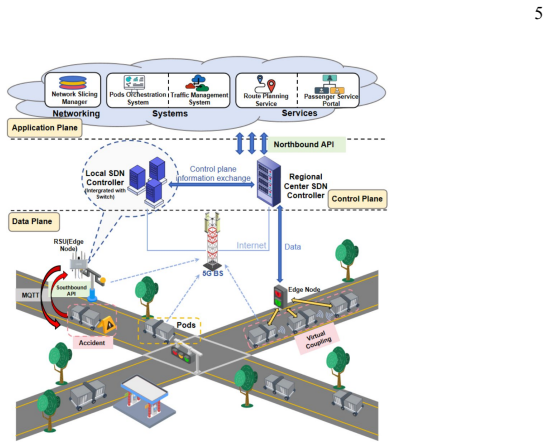
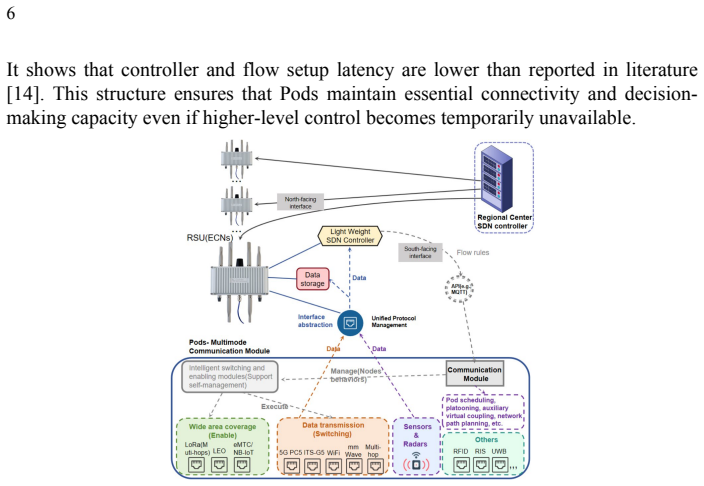
The authors present a distributed communication architecture for the Pods4Rail system that combines regional policy coordination with edge-level autonomy to support low-latency interface management, local failover, and adaptive interface management without central dependency, with measured controller communication and flow setup latencies between edge SDN controllers and Pods lower than those reported in the literature.
What carries the argument
Hierarchical SDN control with regional and edge controllers that enables edge autonomy and local failover.
If this is right
- Local failover becomes possible without reliance on a central controller during network disruptions.
- Edge controllers can perform adaptive interface management in response to changing conditions.
- The architecture supports programmable and flexible network behavior across rail and road segments.
- Regional controllers maintain policy coordination while allowing edge independence.
Where Pith is reading between the lines
- Similar hierarchical SDN setups might apply to other dynamic environments like urban drone coordination where low-latency local decisions matter.
- Extending the defined workflows to include explicit failure injection tests could strengthen validation of the latency claims.
- Deployment alongside existing edge computing infrastructure in transport could reduce integration barriers for autonomous systems.
Load-bearing premise
The representative scenarios and operational workflows defined in the paper accurately capture the dynamic conditions and failure modes of real multimodal rail-road environments.
What would settle it
A direct measurement of controller communication and flow setup latency in an actual multimodal rail-road deployment that exceeds the literature benchmarks cited in the paper.
Figures
read the original abstract
Future multimodal transportation systems require reliable, low-latency communication infrastructures to coordinate autonomous vehicles and moving infrastructure across rail and road networks. Traditional centralized control architectures struggle to meet these requirements in highly dynamic environments due to increased latency, limited scalability, and poor adaptability to changing network conditions. To address this, we propose a distributed communication architecture integrating Software-Defined Networking (SDN) and Multi-Access Edge Computing (MEC), that can create a flexible, programmable and lowlatency network. Results show controller communication and flow setup latency between edge SDN controllers and Pods are lower than reported in literature. The framework uses hierarchical control with regional and edge controllers to support low-latency interface management and edge autonomy. Operational workflows and control logic are defined as representative scenarios. The architecture combines regional policy coordination with edge-level autonomy, enabling local failover and adaptive interface management without central dependency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a distributed SDN-MEC communication architecture for the Pods4Rail multimodal rail-road system. It uses hierarchical regional and edge controllers to enable low-latency interface management, edge autonomy, and local failover. Operational workflows are defined as representative scenarios. The central claim is that controller communication and flow setup latency between edge SDN controllers and Pods is lower than values reported in the literature.
Significance. If the quantitative latency advantage is demonstrated under conditions that match real rail-road dynamics, the architecture could support more scalable and resilient control in dynamic transportation environments where centralized SDN is known to introduce bottlenecks.
major comments (2)
- [Abstract] Abstract: the claim that 'controller communication and flow setup latency between edge SDN controllers and Pods are lower than reported in literature' is presented without any numerical values, baselines, measurement methodology, or error bars. This absence prevents assessment of whether the reported advantage is statistically meaningful or reproducible.
- [Operational workflows / representative scenarios] The section defining operational workflows and control logic states that these are 'representative scenarios' supporting edge autonomy and failover, yet provides no cross-validation against empirical rail-road traces, mobility models, packet-loss statistics, or failure data. Without this, the latency results cannot be extrapolated to the target environment.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our results. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'controller communication and flow setup latency between edge SDN controllers and Pods are lower than reported in literature' is presented without any numerical values, baselines, measurement methodology, or error bars. This absence prevents assessment of whether the reported advantage is statistically meaningful or reproducible.
Authors: We agree the abstract should be more self-contained. The manuscript body reports simulation results for controller communication and flow setup latencies that are lower than the values in the cited literature, including the evaluation setup. We will revise the abstract to include the key numerical comparisons, baselines, and a brief description of the simulation methodology. revision: yes
-
Referee: [Operational workflows / representative scenarios] The section defining operational workflows and control logic states that these are 'representative scenarios' supporting edge autonomy and failover, yet provides no cross-validation against empirical rail-road traces, mobility models, packet-loss statistics, or failure data. Without this, the latency results cannot be extrapolated to the target environment.
Authors: The workflows are presented as representative scenarios constructed from standard multimodal rail-road operational requirements to illustrate edge autonomy and failover. Latency results come from network simulations exercising these scenarios. We will add a dedicated limitations paragraph relating the simulation assumptions to typical rail-road conditions and citing relevant mobility models. Full empirical cross-validation against rail-road packet traces lies outside the scope of this architecture-focused paper. revision: partial
Circularity Check
No circularity; architecture and latency claims rest on external literature comparison
full rationale
The paper presents a distributed SDN/MEC architecture for rail-road systems and reports simulation-based latency results that are lower than values in the external literature. No equations, fitted parameters, derivations, or self-citations appear in the abstract or described content. Operational workflows are labeled 'representative scenarios' by author definition, but the quantitative latency claim is obtained under those scenarios and then compared to independent external baselines rather than being forced by construction or reduced to the input definitions. The representativeness assumption affects external validity but does not create a self-referential loop in the reported result. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
SNCF Group, Flexy: Une solution de mobilité flexible pour les petites lignes, https://www.groupe-sncf.com/fr/innovation/mobilite-territoires/flexy last accessed: 2025/10/13
2025
-
[2]
Flexmove - Service flexible de transport rail-route électrique, autonome et partagé, https://librairie.ademe.fr/mobilite-et-transports/6077-flexmove-service-flexible-de- transport-rail-route-electrique-autonome-et-partage.html, last accessed: 2025/10/13
2025
-
[3]
pods4rail Homepage, https://pods4rail.eu/ last accessed 2025/10/13
2025
-
[4]
IEEE Communications Surveys & Tutorials, 19(3), pp.1657-1681 (2017)
Taleb, T., Samdanis, K., Mada, B., Flinck, H., Dutta, S., Sabella, D.: On multi-access edge computing: A survey of the emerging 5G network edge cloud architecture and orchestration. IEEE Communications Surveys & Tutorials, 19(3), pp.1657-1681 (2017). doi: 10.1109/COMST.2017.2705720
-
[5]
TELKOMNIKA (Telecommunication Computing Electronics and Control), 17(6), pp.3168-3174 (2019)
Assegie, T.A., Nair, P.S.: A review on software defined network security risks and challenges. TELKOMNIKA (Telecommunication Computing Electronics and Control), 17(6), pp.3168-3174 (2019). http://doi.org/10.12928/telkomnika.v17i6.13119
-
[6]
Mobile networks and applications, 26(3), pp.1145-1168 (2021)
Liu, L., Chen, C., Pei, Q., Maharjan, S., Zhang, Y.: Vehicular edge computing and networking: A survey. Mobile networks and applications, 26(3), pp.1145-1168 (2021). https://doi.org/10.1007/s11036-020-01624-1
-
[7]
EURASIP Journal on Wireless Communications and Networking, 2021(1), p.102 (2021)
Subedi, P., et al.: Network slicing: A next generation 5G perspective. EURASIP Journal on Wireless Communications and Networking, 2021(1), p.102 (2021). https://doi.org/10.1186/s13638-021-01983-7
-
[8]
Novel Pathways ink-Contact Geometry
Liu, D., Molla, D.M., Mendiboure, L., Maaloul, S., Berbineau, M., Badis, H.: Design and Evaluation of a Lightweight SDN Controller for Integrated Road and Rail Networks. In: Hacène, F., Selma, B., Éric, R. (eds) Machine Learning for Networking. MLN 2024. LNCS, vol. 15540, pp. 133-148. Springer, Switzerland (2024). https://doi.org/10.1007/978-3-032- 00552-6_10
-
[9]
In: 2018 International Conference on Computer and Applications (ICCA) (pp
Mouawad, N., Naja, R., Tohme, S.: Optimal and dynamic SDN controller placement. In: 2018 International Conference on Computer and Applications (ICCA) (pp. 1-9). IEEE (2018). doi: 10.1109/COMAPP.2018.8460361
-
[10]
IEEE Transactions on Vehicular Technology, 69(12), pp.14523-14536 (2020)
Oubbati, O.S., Atiquzzaman, M., Lorenz, P., Baz, A., Alhakami, H.: SEARCH: An SDN- enabled approach for vehicle path-planning. IEEE Transactions on Vehicular Technology, 69(12), pp.14523-14536 (2020). doi: 10.1109/TVT.2020.3043306
-
[11]
International Journal of Advanced Computer Science and Applications, 11(3) (2020)
Adbeb, T., Wu, D., Ibrar, M.: Software-defined networking (SDN) based VANET architecture: Mitigation of traffic congestion. International Journal of Advanced Computer Science and Applications, 11(3) (2020). doi: 10.14569/IJACSA.2020.0110388 9
-
[12]
Future Internet, 6(2), pp.302-336 (2014)
Braun, W., Menth, M.: Software-defined networking using OpenFlow: Protocols, applications and architectural design choices. Future Internet, 6(2), pp.302-336 (2014). https://doi.org/10.3390/fi6020302
-
[13]
IEEE access, 5, pp.1872-1899 (2017)
Kobo, H.I., Abu-Mahfouz, A.M., Hancke, G.P.: A survey on software-defined wireless sensor networks: Challenges and design requirements. IEEE access, 5, pp.1872-1899 (2017). doi: 10.1109/ACCESS.2017.2666200
-
[14]
Khalili, R., Despotovic, Z., Hecker, A.: Flow setup latency in SDN networks. IEEE Journal on Selected Areas in Communications, 36(12), pp.2631-2639 (2018) doi: 10.1109/JSAC.2018.2871291
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.