Beyond a Shadow of a Doubt: Close Proximity Geometry Reconstruction Using FMCW Radar Shadow Effects
Pith reviewed 2026-06-25 20:43 UTC · model grok-4.3
The pith
Vehicle chassis shadows in FMCW radar enable closed-form recovery of nearby objects' 3D inclinations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The object inclination is retrieved without assumptions about the wider scene, but through an analytical, closed-form mapping between its radar return boundaries and the opening angle, made possible by the distinctive and consistent geometric shadow formed when the vehicle chassis occludes radar rays.
What carries the argument
Analytical closed-form mapping from radar return boundaries to object opening angle, using chassis-induced shadow as the fixed geometric reference.
If this is right
- Inclinations of nearby slender vertical objects can be estimated from radar scans under practical conditions.
- Object segmentation in the radar scan is the main practical bottleneck for the method.
- Chassis shadows extend the utility of 2D rotating radar from localisation toward 3D scene reconstruction.
- The approach works without scene-wide assumptions, relying only on the isolated shadow-object interaction.
Where Pith is reading between the lines
- The cue could be fused with existing radar velocity or intensity features to handle objects that are not slender and vertical.
- Autonomous platforms might use this to obtain partial 3D geometry from a single rotating radar unit in weather that disables other sensors.
- Similar occlusion-shadow mappings might apply to other rotating or scanning radar configurations beyond the tested Navtech model.
- Automating the segmentation step would be a direct next step to reach real-time deployment.
Load-bearing premise
The chassis occludes radar rays to form a distinctive and consistent geometric shadow whose interaction with object returns can be isolated and mapped to inclination.
What would settle it
A controlled test with known object inclinations where the measured radar return boundaries, after correct segmentation, fail to produce the correct angle through the closed-form mapping.
Figures


read the original abstract
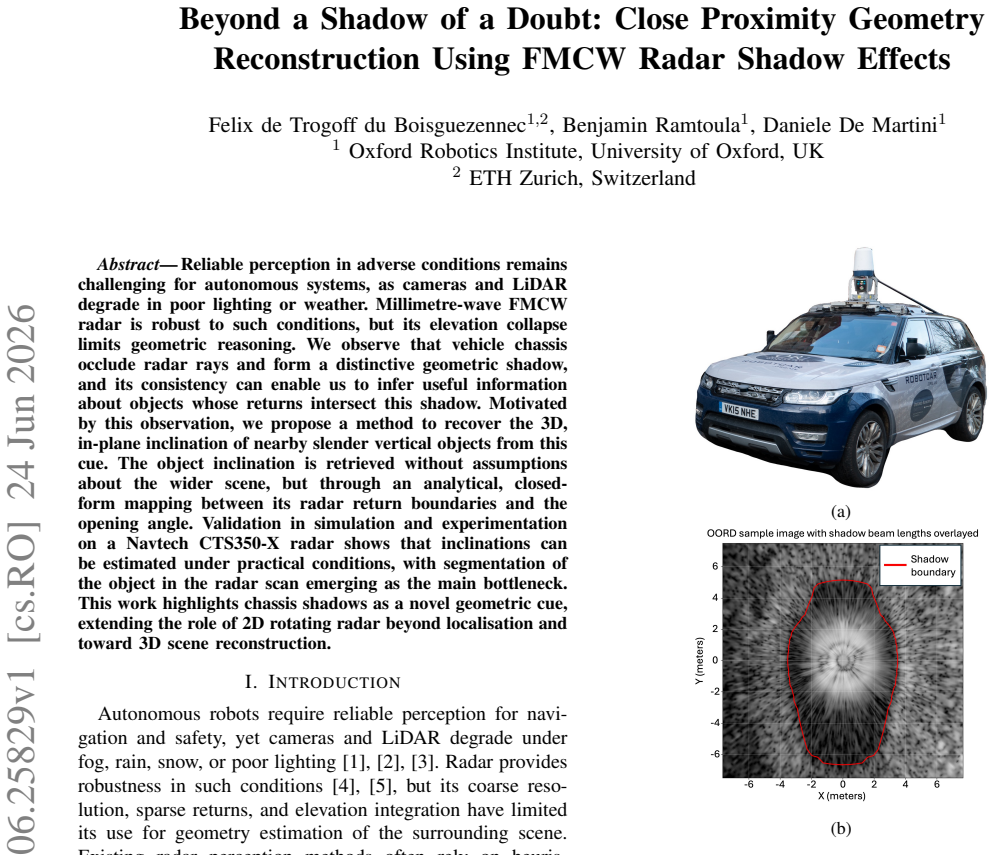
Reliable perception in adverse conditions remains challenging for autonomous systems, as cameras and LiDAR degrade in poor lighting or weather. Millimetre-wave FMCW radar is robust to such conditions, but its elevation collapse limits geometric reasoning. We observe that vehicle chassis occlude radar rays and form a distinctive geometric shadow, and its consistency can enable us to infer useful information about objects whose returns intersect this shadow. Motivated by this observation, we propose a method to recover the 3D, in-plane inclination of nearby slender vertical objects from this cue. The object inclination is retrieved without assumptions about the wider scene, but through an analytical, closed-form mapping between its radar return boundaries and the opening angle. Validation in simulation and experimentation on a Navtech CTS350-X radar shows that inclinations can be estimated under practical conditions, with segmentation of the object in the radar scan emerging as the main bottleneck. This work highlights chassis shadows as a novel geometric cue, extending the role of 2D rotating radar beyond localisation and toward 3D scene reconstruction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that vehicle chassis occlude FMCW radar rays to produce a consistent geometric shadow whose intersection with returns from nearby slender vertical objects permits recovery of the object's 3D in-plane inclination angle. The inclination is obtained via an analytical closed-form mapping from the observed radar return boundaries to the opening angle, without assumptions on the wider scene. The mapping is derived from geometry and validated in both simulation and real experiments on a Navtech CTS350-X radar; object segmentation in the radar scan is identified as the primary practical bottleneck. The work positions chassis shadows as a novel cue for extending 2D rotating radar toward 3D scene reconstruction.
Significance. If the closed-form mapping holds under the stated conditions, the result supplies a parameter-free geometric cue that augments radar's utility in adverse weather and lighting where cameras and LiDAR degrade. The combination of an analytical derivation with both simulated and hardware validation on a commercial rotating radar is a concrete strength; the identification of segmentation as the limiting factor also supplies a clear direction for follow-on work.
Simulated Author's Rebuttal
We thank the referee for the positive summary of our work, the recognition of the closed-form mapping and validation strengths, and the recommendation for minor revision. No specific major comments appear in the provided report.
Circularity Check
No significant circularity detected
full rationale
The paper presents an analytical closed-form mapping derived from geometric principles of chassis-induced radar shadows intersecting object returns, mapping return boundaries directly to inclination angle without fitted parameters, self-referential definitions, or load-bearing self-citations. The derivation is framed as first-principles geometry independent of wider scene assumptions, with validation performed separately via simulation and Navtech CTS350-X experiments. No steps in the provided abstract or description reduce the central claim to its inputs by construction; segmentation is explicitly identified as the practical limit rather than any internal fit. This is a standard non-circular finding for a geometry-based method with external validation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Vehicle chassis occlude radar rays and form a distinctive geometric shadow whose consistency enables inference about intersecting object returns.
Reference graph
Works this paper leans on
-
[1]
Seeing through fog without seeing fog: Deep multi- modal sensor fusion in unseen adverse weather,
M. Bijeli ´c, T. Gruber, F. Mannan, F. Kraus, W. Ritter, K. Dietmayer, and F. Heide, “Seeing through fog without seeing fog: Deep multi- modal sensor fusion in unseen adverse weather,” inProc. IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2020, pp. 11 682–11 692
2020
-
[2]
Fog simulation on real LiDAR point clouds for 3d object detection in adverse weather,
M. Hahner, C. Sakaridis, D. Dai, and L. Van Gool, “Fog simulation on real LiDAR point clouds for 3d object detection in adverse weather,” inProc. IEEE/CVF Int. Conf. on Computer Vision (ICCV), 2021, pp. 15 283–15 292
2021
-
[3]
LiDAR snowfall simulation for robust 3d object detection,
M. Hahner, C. Sakaridis, M. Bijeli ´c, F. Heide, F. Yu, D. Dai, and L. Van Gool, “LiDAR snowfall simulation for robust 3d object detection,” inProc. IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 16 364–16 374
2022
-
[4]
K-Radar: 4d radar object detection for autonomous driving in various weather conditions,
D.-H. Paek, S.-H. Kong, and K. T. Wijaya, “K-Radar: 4d radar object detection for autonomous driving in various weather conditions,” in NeurIPS Datasets and Benchmarks Track, 2022
2022
-
[5]
nuscenes: A multimodal dataset for autonomous driving,
H. Caesar, V . Bankiti, A. H. Lang, S. V ora, V . E. Liong, Q. Xu, A. Krishnan, Y . Pan, G. Baldan, and O. Beijbom, “nuscenes: A multimodal dataset for autonomous driving,” inProc. IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2020, pp. 11 618–11 628
2020
-
[6]
Interference in automotive radar systems: Characteristics, mitigation techniques, and current and future research,
S. Alland, W. E. Stark, M. Ali, and M. V . Hegde, “Interference in automotive radar systems: Characteristics, mitigation techniques, and current and future research,”IEEE Signal Processing Magazine, vol. 36, no. 5, pp. 45–59, 2019
2019
-
[7]
The radar ghost dataset – an evaluation of ghost objects in automotive radar data,
F. Kraus, N. Scheiner, W. Ritter, and K. Dietmayer, “The radar ghost dataset – an evaluation of ghost objects in automotive radar data,” in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2021, pp. 8570–8577
2021
-
[8]
Radar fields: Frequency-space neural scene representa- tions for fmcw radar,
D. Borts, E. Liang, T. Br ¨odermann, A. Ramazzina, S. Walz, E. Pal- ladin, J. Sun, D. Brueggemann, C. Sakaridis, L. Van Gool, M. Bijeli ´c, and F. Heide, “Radar fields: Frequency-space neural scene representa- tions for fmcw radar,” inACM SIGGRAPH 2024 Conference Papers. New York, NY , USA: Association for Computing Machinery, 2024
2024
-
[9]
RadarSplat: Radar Gaussian Splatting for High-Fidelity Data Syn- thesis and 3D Reconstruction of Autonomous Driving Scenes,
P.-C. Kung, S. Harisha, R. Vasudevan, A. Eid, and K. A. Skinner, “RadarSplat: Radar Gaussian Splatting for High-Fidelity Data Syn- thesis and 3D Reconstruction of Autonomous Driving Scenes,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 27 596–27 606
2025
-
[10]
OORD: The oxford offroad radar dataset,
M. Gadd, D. De Martini, O. Bartlett, P. Murcutt, M. Towlson, M. Widojo, V . Mus ¸at, L. Robinson, E. Panagiotaki, G. Pramatarov, M. A. K ¨uhn, L. Marchegiani, P. Newman, and L. Kunze, “OORD: The oxford offroad radar dataset,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 11, pp. 18 779–18 790, 2024
2024
-
[11]
Radarays: Real-time simulation of rotating fmcw radar for mobile robotics via hardware- accelerated ray tracing,
A. Mock, M. Magnusson, and J. Hertzberg, “Radarays: Real-time simulation of rotating fmcw radar for mobile robotics via hardware- accelerated ray tracing,”IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 2470–2477, 2025
2025
-
[12]
Perception and sensing for autonomous vehicles under adverse weather conditions: A survey,
Y . Zhang, A. Carballo, H. Yang, and K. Takeda, “Perception and sensing for autonomous vehicles under adverse weather conditions: A survey,”ISPRS Journal of Photogrammetry and Remote Sensing, vol. 196, pp. 146–177, 2023
2023
-
[13]
Towards deep radar perception for autonomous driving: Datasets, methods, and challenges,
Y . Zhou, L. Liu, H. Zhao, M. L ´opez-Ben´ıtez, L. Yu, and Y . Yue, “Towards deep radar perception for autonomous driving: Datasets, methods, and challenges,”Sensors, vol. 22, no. 11, p. 4208, 2022
2022
-
[14]
The oxford radar robotcar dataset: A radar extension to the oxford robotcar dataset,
D. Barnes, M. Gadd, P. Murcutt, P. Newman, and I. Posner, “The oxford radar robotcar dataset: A radar extension to the oxford robotcar dataset,” inProc. IEEE Int. Conf. on Robotics and Automation (ICRA), 2020, pp. 6433–6438
2020
-
[15]
Precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions,
S. H. Cen and P. Newman, “Precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions,” in Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), 2018, pp. 6045–6052
2018
-
[16]
Masking by moving: Learning distraction-free radar odometry from pose information,
D. Barnes, R. Weston, and I. Posner, “Masking by moving: Learning distraction-free radar odometry from pose information,” inProc. Conf. on Robot Learning (CoRL), 2020
2020
-
[17]
Radar odometry combining probabilistic estimation and unsupervised feature learning,
K. Burnett, D. J. Yoon, A. P. Schoellig, and T. D. Barfoot, “Radar odometry combining probabilistic estimation and unsupervised feature learning,” inProceedings of Robotics: Science and Systems (RSS), 2021
2021
-
[18]
Radar teach and repeat: Architecture and initial field testing,
X. Qiao, A. Krawciw, S. Lilge, and T. D. Barfoot, “Radar teach and repeat: Architecture and initial field testing,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2025
2025
-
[19]
Cfear radarodometry - conservative filtering for efficient and accurate radar odometry,
D. Adolfsson, M. Magnusson, A. Alhashimi, A. J. Lilienthal, and H. Andreasson, “Cfear radarodometry - conservative filtering for efficient and accurate radar odometry,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 5462– 5469
2021
-
[20]
Point-based metric and topological localisation between lidar and overhead imagery,
T. Y . Tang, D. De Martini, and P. Newman, “Point-based metric and topological localisation between lidar and overhead imagery,” Autonomous Robots, vol. 47, no. 5, pp. 595–615, 2023
2023
-
[21]
Radarslam: Radar based large-scale slam in all weathers,
Z. Hong, Y . Petillot, and S. Wang, “Radarslam: Radar based large-scale slam in all weathers,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 5164–5170
2020
-
[22]
Radar-only ego-motion estimation in dif- ficult settings via graph matching,
S. H. Cen and P. Newman, “Radar-only ego-motion estimation in dif- ficult settings via graph matching,” in2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 298–304
2019
-
[23]
Radar odometry combining probabilistic estimation and unsupervised feature learning,
K. Burnett, D. J. Yoon, A. P. Schoellig, and T. D. Barfoot, “Radar odometry combining probabilistic estimation and unsupervised feature learning,”arXiv preprint arXiv:2105.14152, 2021
arXiv 2021
-
[24]
Self-supervised learning for using overhead imagery as maps in outdoor range sensor localization,
T. Y . Tang, D. De Martini, S. Wu, and P. Newman, “Self-supervised learning for using overhead imagery as maps in outdoor range sensor localization,”The International Journal of Robotics Research, vol. 40, no. 12-14, pp. 1488–1509, 2021
2021
-
[25]
Automotive Radar Missing Dimension Reconstruction from Motion,
C.-Y . Hou, C.-C. Wang, and W.-C. Lin, “Automotive Radar Missing Dimension Reconstruction from Motion,” in2023 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), 2023, pp. 11 226–11 232
2023
-
[26]
Ground moving target tracking and refocusing using shadow in video- SAR,
X. Yang, J. Shi, Y . Zhou, C. Wang, Y . Hu, X. Zhang, and S. Wei, “Ground moving target tracking and refocusing using shadow in video- SAR,”Remote Sensing, vol. 12, no. 18, p. 3083, 2020
2020
-
[27]
Large-scale building height retrieval from single SAR imagery based on bounding box regression networks,
Y . Sun, L. Mou, Y . Wang, S. Montazeri, and X. X. Zhu, “Large-scale building height retrieval from single SAR imagery based on bounding box regression networks,”ISPRS Journal of Photogrammetry and Remote Sensing, vol. 184, pp. 79–95, 2022
2022
-
[28]
Multi-scene building height estimation method based on shadow in high resolution im- agery,
Y . Xie, D. Feng, S. Xiong, J. Zhu, and Y . Liu, “Multi-scene building height estimation method based on shadow in high resolution im- agery,”Remote Sensing, vol. 13, no. 15, p. 2862, 2021
2021
-
[29]
CARLA: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “CARLA: An open urban driving simulator,” inProceedings of the 1st Annual Conference on Robot Learning (CoRL), ser. Proceedings of Machine Learning Research (PMLR), vol. 78, 2017, pp. 1–16
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.