Hardware Design for Table Tennis Robot Capable of Beating Professional Players
Pith reviewed 2026-06-26 05:22 UTC · model grok-4.3
The pith
An 8-DoF robot built from elite player motion specs defeats multiple professional table tennis players.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that hardware specifications taken directly from elite human motion analysis, when realized in an 8-DoF arm with optimized mechanics and dynamics-aware reinforcement learning control, produce a robot capable of defeating professional table tennis players.
What carries the argument
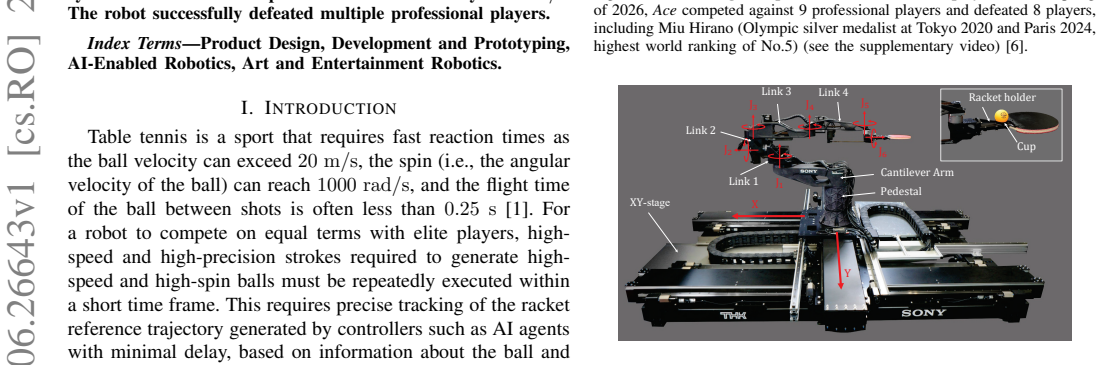
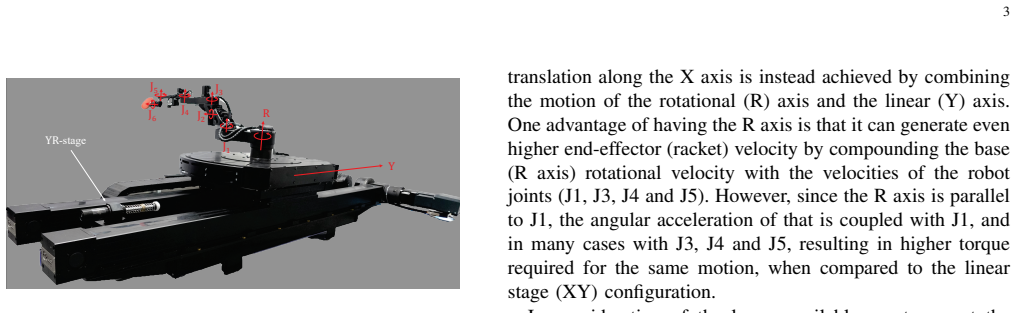
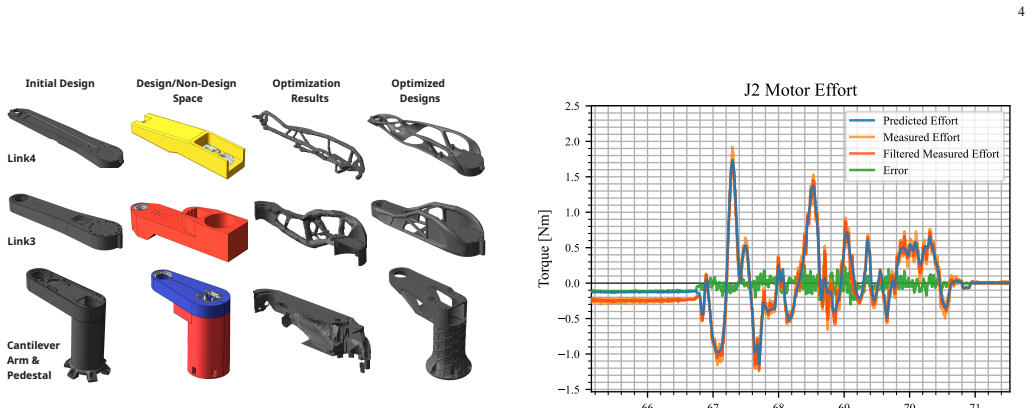
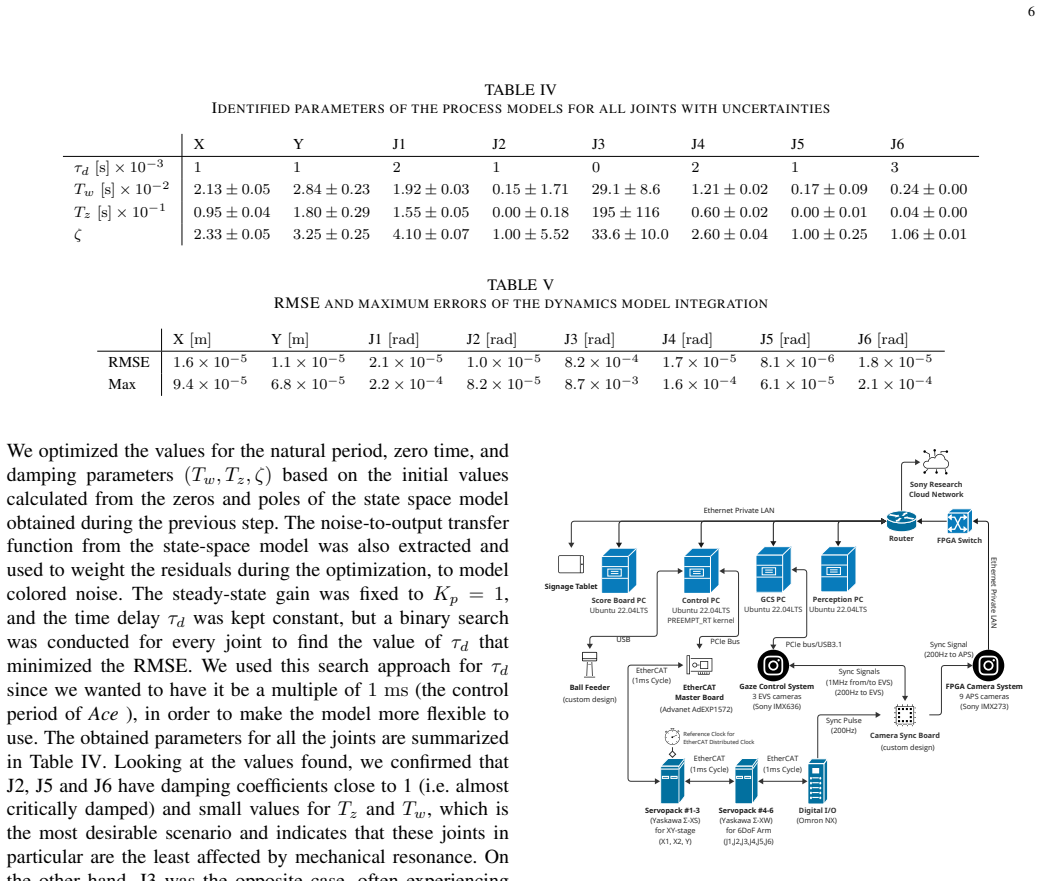
The 8-DoF robot Ace, whose mechanical links were refined by topology optimization, motors selected via inverse-dynamics torque modeling, and joints modeled with low-order dynamics plus delay compensation to enable reinforcement learning control.
If this is right
- Robots can now reach the physical performance envelope of professional table tennis players.
- The same motion-analysis-to-specs workflow can be repeated for other fast-action sports.
- Reinforcement learning becomes practical for high-speed manipulation once per-joint dynamics models with delay compensation are available.
- Hardware performance limits, rather than control algorithms, had been the main barrier to competitive robotic table tennis.
Where Pith is reading between the lines
- Earlier table tennis robots were likely limited by hardware that fell short of professional motion demands.
- The same robot could function as a consistent training partner for human players seeking to improve.
- Extending the method to other racket sports requires fresh motion capture for each sport's distinct movement patterns.
Load-bearing premise
The target specifications taken from analysis of elite players' motions are sufficient to produce a robot that wins real matches against professionals.
What would settle it
A sequence of matches in which the robot loses to the same professional players or fails to maintain the reported 0.8 s cycle time and 22 m/s peak velocity.
Figures
read the original abstract
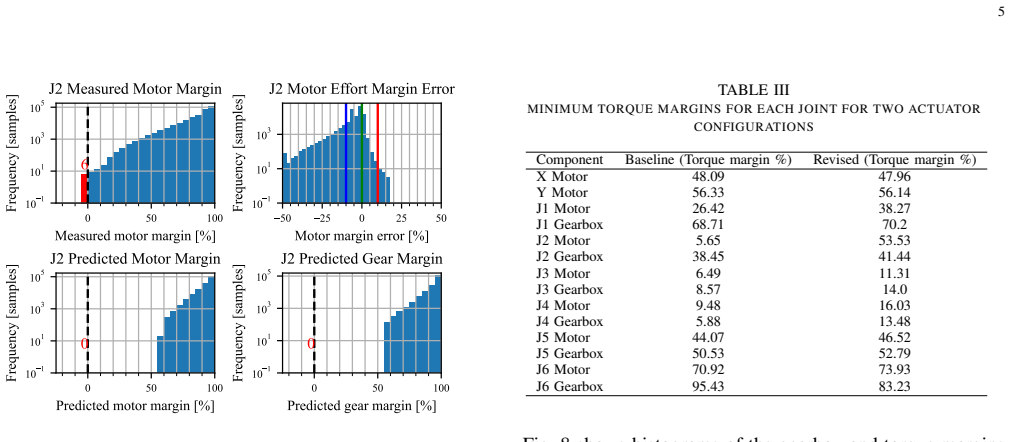
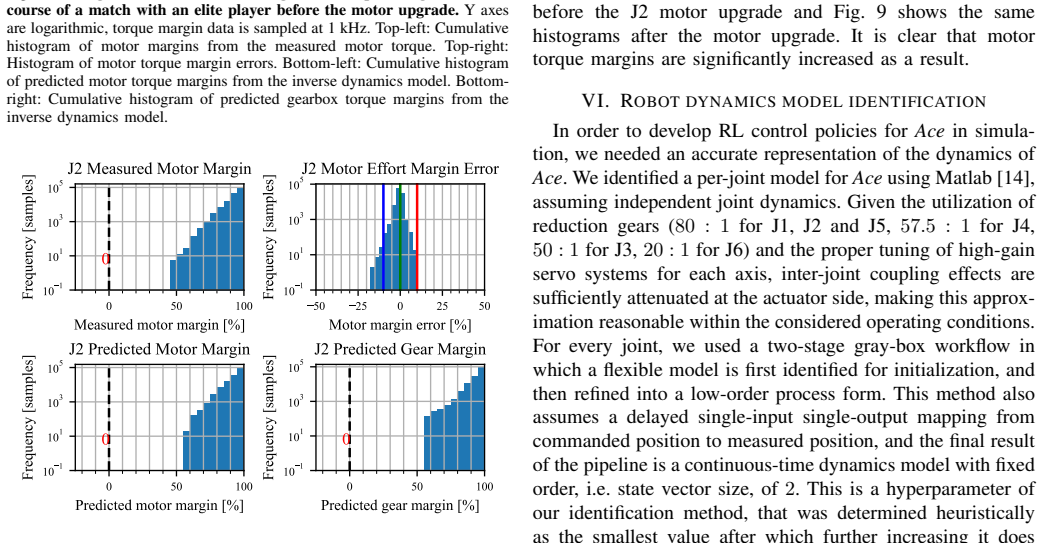
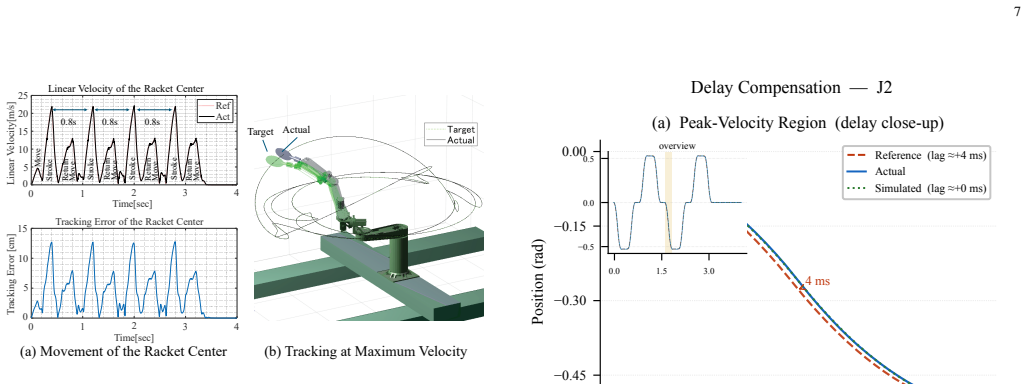
This paper focuses on the hardware specifications required for a table tennis robot to beat professional players. After analyzing the motions of elite players, we defined target specifications for the workspace, payload, external-force resistance, physical performance, serve capability, and end-effector accuracy. Based on these specifications, we developed "Ace", a custom 8-DoF robot. The mechanical structure was improved through topology optimization to minimize mass while preserving stiffness. Motor and gearbox selection was optimized using an inverse-dynamics torque model. Low-order per-joint dynamics models with delay compensation were identified and integrated into simulation to enable the use of an RL control policy. Experiments demonstrated repeated full-stroke swings with a cycle time of 0.8 s and a peak racket-center velocity of 22 m/s. The robot successfully defeated multiple professional players.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper derives target hardware specifications for a table tennis robot from analysis of elite players' motions (workspace, payload, external-force resistance, physical performance, serve capability, end-effector accuracy), presents the design of the resulting 8-DoF robot 'Ace' with topology-optimized structure, inverse-dynamics motor selection, and low-order per-joint dynamics models with delay compensation for RL control, and reports experimental results of 0.8 s full-stroke cycles at 22 m/s racket velocity together with the claim that the robot defeated multiple professional players.
Significance. If the defeat claim is substantiated with match data, the work would establish concrete, experimentally validated hardware benchmarks for professional-level table-tennis performance and demonstrate a viable path from motion analysis through optimized mechanics and identified dynamics to RL-based control in a high-speed interactive task.
major comments (2)
- [Abstract / Experiments] Abstract and experimental results: the central claim that the robot 'successfully defeated multiple professional players' is unsupported by any quantitative match data (win rates, rally counts, opponent rankings or ratings, rules followed, or sensing/control performance during actual play), rendering the leap from isolated swing metrics to interactive match outcomes unverifiable.
- [Specification derivation] Target-specification derivation (early sections): the claim that the listed workspace, payload, force-resistance, and accuracy targets are sufficient to beat professionals rests on the untested assumption that matching elite motion statistics produces winning hardware; no sensitivity analysis or comparison against lower-spec baselines is provided to support this sufficiency.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point by point below, indicating the revisions that will be made to the manuscript.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and experimental results: the central claim that the robot 'successfully defeated multiple professional players' is unsupported by any quantitative match data (win rates, rally counts, opponent rankings or ratings, rules followed, or sensing/control performance during actual play), rendering the leap from isolated swing metrics to interactive match outcomes unverifiable.
Authors: We agree that the claim is unsupported by quantitative match data. The experimental results section reports only isolated swing metrics (cycle time and velocity), with no recorded match statistics or opponent details. We will revise the abstract, introduction, and conclusion to remove the claim of defeating professional players. The revised text will focus exclusively on the achieved hardware performance benchmarks. revision: yes
-
Referee: [Specification derivation] Target-specification derivation (early sections): the claim that the listed workspace, payload, force-resistance, and accuracy targets are sufficient to beat professionals rests on the untested assumption that matching elite motion statistics produces winning hardware; no sensitivity analysis or comparison against lower-spec baselines is provided to support this sufficiency.
Authors: The specifications were derived by extracting workspace, velocity, force, and accuracy requirements directly from motion capture of elite players. The manuscript demonstrates that these targets can be met through the described design process. We acknowledge that no sensitivity analysis or baseline comparisons are included to prove sufficiency for winning matches. We will add a short limitations paragraph in the discussion section noting that the specs represent necessary conditions based on player analysis but that sufficiency for consistent match outcomes would require additional validation. revision: yes
Circularity Check
No circularity: specs from external motion analysis, performance from physical experiments
full rationale
The paper analyzes elite players' motions to set target specifications for workspace, payload, velocity, etc., then builds an 8-DoF robot to those specs and reports experimental swing metrics (0.8 s cycle, 22 m/s) plus match outcomes. No equations, fitted parameters, or predictions are shown to reduce by construction to the inputs. No self-citations, uniqueness theorems, or ansatzes are invoked in a load-bearing way. The derivation chain is self-contained against external benchmarks (player motion data and hardware tests), so the central claim does not collapse into a renaming or fit.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Japan’s 1000 players (table tennis statistics),
I. Ogimura, “Japan’s 1000 players (table tennis statistics),” 1994. [Online]. Available: https://ogi-museum.com/1994-nihonnosennin-2
1994
-
[2]
The ping pong robot to return a ball precisely
K. Asai, M. Nakayama, and S. Yase, “The ping pong robot to return a ball precisely.”Omron Technics, vol. 51, pp. 1–6, 2020
2020
-
[3]
Achieving human level competitive robot table tennis,
D. B. D’Ambrosio, S. W. Abeyruwan, L. Graesser, A. Iscen, H. B. Amor, A. Bewley, B. Reed, K. Reymann, L. Takayama, Y . Tassa,et al., “Achieving human level competitive robot table tennis,” in7th Robot Learning Workshop: Towards Robots with Human-Level Abilities, 2025
2025
-
[4]
Outplaying elite table tennis players with an autonomous robot,
P. D. et al., “Outplaying elite table tennis players with an autonomous robot,”Nature, vol. 652, pp. 886–891, 2026
2026
-
[5]
International table tennis feder- ation (ittf),
International Table Tennis Federation, “International table tennis feder- ation (ittf),” At: https://www.ittf.com, 2025
2025
-
[6]
What happened after the nature paper: Ace vs. professional players,
SonyAI, “What happened after the nature paper: Ace vs. professional players,” 2026. [Online]. Available: https://ai.sony/blog/ what-happened-after-the-nature-paper-ace-vs.-professional-players
2026
-
[7]
Analysis of a movement of a top table tennis player using a direct linear transformation (dlt) method,
K. Yoshida, Y . Iimoto, Y . Ushiyama, M. Kaga, and K. Suzuki, “Analysis of a movement of a top table tennis player using a direct linear transformation (dlt) method,”Japanese Journal of Sport Education Studies, vol. 11, no. 2, pp. 91–102, 1991
1991
-
[8]
Topology optimization for multi-component robotic arms under time-varying loads,
C. Wu, Y . Xu, J. Fang, G. Sun, G. P. Steven, and Q. Li, “Topology optimization for multi-component robotic arms under time-varying loads,”Structural and Multidisciplinary Optimization, vol. 68, no. 9, p. 188, 2025. [Online]. Available: https://doi.org/10. 1007/s00158-025-04129-1
2025
-
[9]
M. Alshihabi, M. Ozkahraman, and M. Y . Kayacan, “Enhancing the reliability of a robotic arm through lightweighting and vibration control with modal analysis and topology optimization,”Mechanics Based Design of Structures and Machines, vol. 53, no. 3, pp. 1950–1974, 2025. [Online]. Available: https://doi.org/10.1080/15397734.2024.2400207
-
[10]
L. Sha, A. Lin, X. Zhao, and S. Kuang, “A topology optimization method of robot lightweight design based on the finite element model of assembly and its applications,”Science Progress, vol. 103, no. 3, p. 0036850420936482, 2020, pMID: 32609583. [Online]. Available: https://doi.org/10.1177/0036850420936482
-
[11]
[Online]
Altair Engineering Inc.,Altair OptiStruct, Altair Engineering Inc., Troy, MI, USA, 2025, version 2025, accessed April 22, 2026. [Online]. Available: https://altair.com/optistruct
2025
-
[12]
The pinocchio c++ library – a fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives,
J. Carpentier, G. Saurel, G. Buondonno, J. Mirabel, F. Lamiraux, O. Stasse, and N. Mansard, “The pinocchio c++ library – a fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives,” inIEEE International Symposium on System Integrations (SII), 2019
2019
-
[13]
Pinocchio: fast forward and inverse dynamics for poly-articulated systems,
J. Carpentier, F. Valenza, N. Mansard,et al., “Pinocchio: fast forward and inverse dynamics for poly-articulated systems,” https://stack-of- tasks.github.io/pinocchio, 2015–2021
2015
-
[14]
[Online]
The MathWorks Inc.,System Identification Toolbox version: 25.1 (R2025a), Natick, MA, USA, 2025. [Online]. Available: https: //www.mathworks.com
2025
-
[15]
Event-based gaze control system for accurate real-time spin estimation in professional ball games,
Y . Hu, F. Schiling, V . Cavinato, A. Aydin, A. Politis, R. T. Morales, K. Yannick, W. Scheper, P. D ¨urr, and N. Takahashi, “Event-based gaze control system for accurate real-time spin estimation in professional ball games,” inEuropean Conference on Computer Vision (ECCV) 2026, 2026
2026
-
[16]
Sigma-X Servopacks
Y ASKAW A Electoric Corp., “Sigma-X Servopacks.” [On- line]. Available: https://www.yaskawa.eu.com/motion-control/sigma-x/ sx-servopacks
-
[17]
EtherCAT Specification
EtherCAT Technology Group, “EtherCAT Specification.” [Online]. Available: https://ethercat.org
-
[18]
AdEXP1572 PCI Express EtherCAT master board
Advanet Inc., “AdEXP1572 PCI Express EtherCAT master board.” [Online]. Available: https://www.advanet.co.jp/products/ industrial-network/ethercat/adexp1572/
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.