Real-Time Compliance and Position Control of a Hyper-redundant Soft Robotic Arm
Pith reviewed 2026-06-30 06:39 UTC · model grok-4.3
The pith
A soft robotic arm with a rigid articulated backbone and antagonistic pneumatic muscles achieves simultaneous real-time quantitative control of tip position and compliance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The rigid articulated backbone makes the tip compliance and position of the arm predictable enough to be commanded quantitatively in real time. The robot employs a unified iterative inverse-kinematics and inverse-compliance controller to achieve simultaneous, quantitative control of both compliance and position. The task-space compliance and kinematics models and the control law are derived and verified on both the physical arm and a matched simulation.
What carries the argument
The rigid articulated backbone together with the unified iterative inverse-kinematics and inverse-compliance controller that solves for joint angles and stiffnesses to meet commanded tip position and compliance.
If this is right
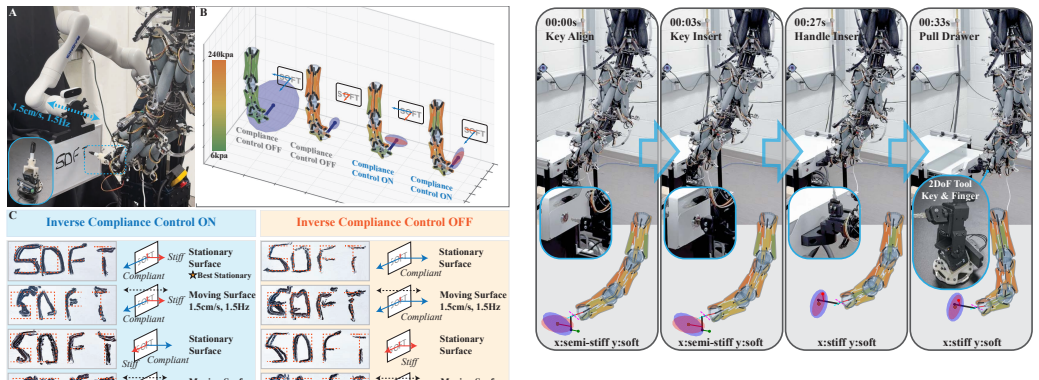
- The arm rejects disturbances while writing on a moving whiteboard.
- The arm passively corrects hidden misalignment during key insertion and drawer opening.
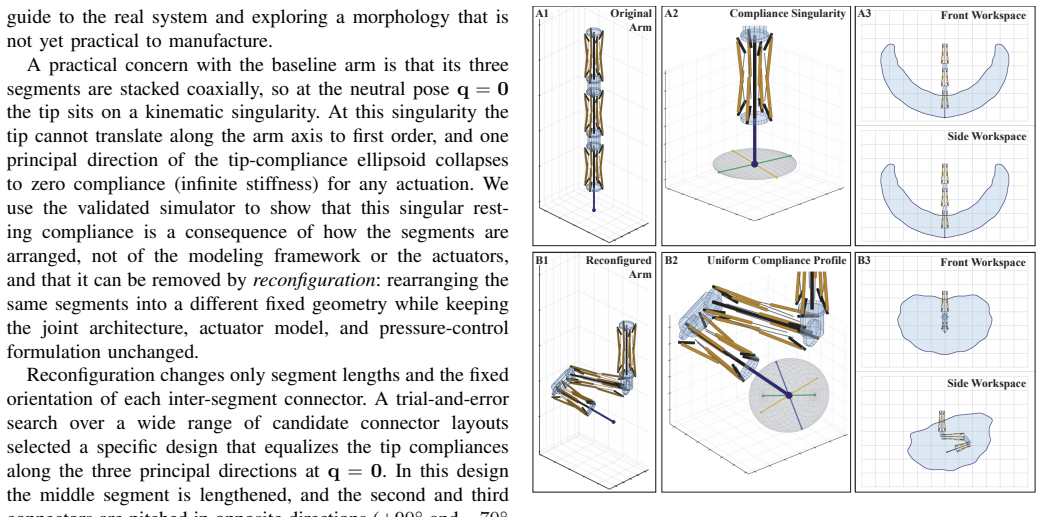
- The same controller and models extend to other arm morphologies, as tested in simulation.
- Quantitative control of both variables occurs without separate compliance and position loops.
Where Pith is reading between the lines
- Designs that embed kinematic predictability in the structure may reduce reliance on high-bandwidth sensing for contact tasks.
- The approach could be tested on non-arm morphologies such as legs or grippers to check whether the backbone principle generalizes.
- If model accuracy degrades with scale or payload, the iterative solver might still converge by adding a small number of online corrections.
Load-bearing premise
The task-space compliance and kinematics models derived from the rigid backbone remain sufficiently accurate under real-world contact and actuation nonlinearities to support the iterative controller without post-hoc tuning.
What would settle it
A set of physical trials in which commanded tip position and stiffness are tracked while the arm experiences varying unexpected contacts; failure would appear as large, consistent deviation between commanded and measured compliance or position that the controller cannot reduce.
Figures


read the original abstract
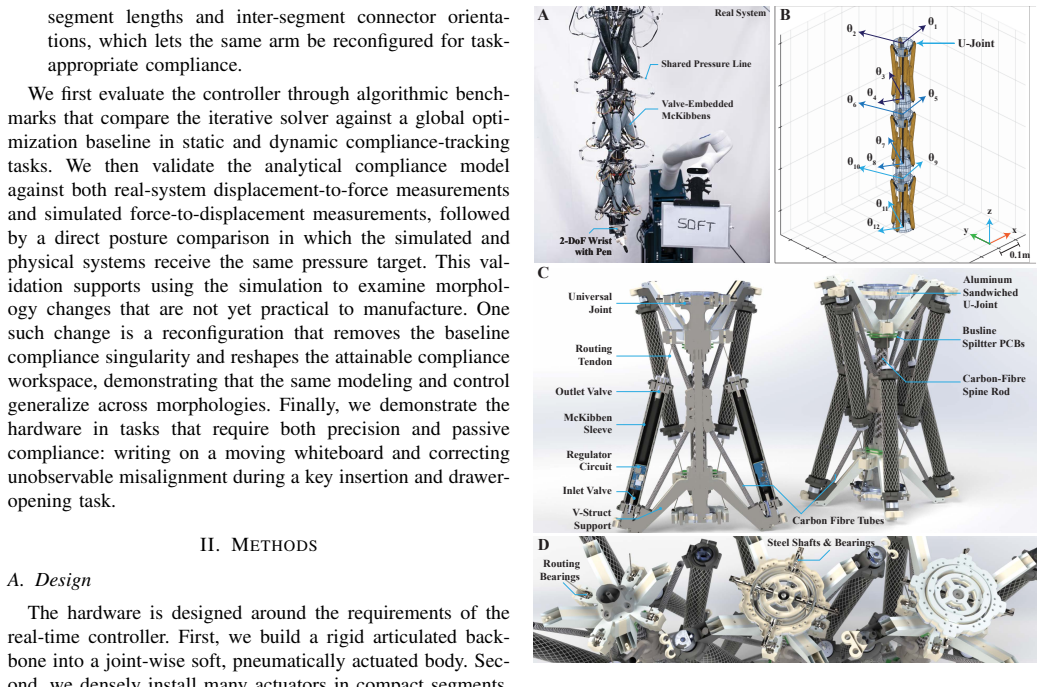
Robots working in unstructured or partially unobservable environments must combine accurate motion with physical compliance that can passively correct contact misalignment. Soft robots provide this compliance but have struggled to precisely control their tip compliance and position. This paper presents a robot architecture designed around that control problem: a 7-link arm whose six articulated joints provide twelve independently driven revolute axes, each actuated by an antagonistic pair of pneumatic muscles, so that every axis can simultaneously change its angle and linearly adjust its stiffness. The rigid articulated backbone makes the tip compliance and position of the arm predictable enough to be commanded quantitatively in real time. The robot employs a unified iterative inverse-kinematics and inverse-compliance controller to achieve simultaneous, quantitative control of both compliance and position. The task-space compliance and kinematics models and the control law are derived and verified on both the physical arm and a matched simulation. Simulation is then used to study how the same framework extends to other arm morphologies. Finally, the arm demonstrates tasks that have been difficult for both rigid and soft arms: rejecting disturbances while writing on a moving whiteboard, and passively correcting hidden misalignment during a key-insertion and drawer-opening task. That these tasks succeed under so straightforward a controller is evidence for the advantage of this algorithm-informed structural design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a 7-link hyper-redundant soft robotic arm whose six joints are each driven by an antagonistic pair of pneumatic muscles, yielding twelve independent actuation axes that permit simultaneous adjustment of joint angle and stiffness. Task-space kinematics and compliance models are derived from the rigid articulated backbone; these models underpin a unified iterative inverse-kinematics / inverse-compliance controller that commands tip position and stiffness in real time. The models and controller are stated to have been verified on both the physical hardware and a matched simulation; simulation is further used to explore other morphologies. Hardware demonstrations include disturbance rejection while writing on a moving whiteboard and passive correction of hidden misalignment during key insertion and drawer opening.
Significance. If the task-space models remain sufficiently accurate, the work supplies a concrete structural and algorithmic route to quantitative, simultaneous control of position and compliance in soft robots—an area where prior systems have typically traded one for the other. Explicit hardware verification together with simulation-based morphology studies constitute reproducible evidence that strengthens the central claim. The approach could inform design of future soft manipulators intended for contact-rich, partially observable environments.
major comments (2)
- [Abstract] Abstract: the claim that 'the task-space compliance and kinematics models and the control law are derived and verified on both the physical arm and a matched simulation' and that the demonstrated tasks succeeded is not accompanied by any quantitative residual-error metrics (position RMSE, stiffness error, or convergence statistics of the iterative solver) or by any description of how model mismatch arising from pneumatic hysteresis or contact compliance was quantified or mitigated. Because the central claim is that the rigid-backbone-derived models suffice for quantitative real-time control, the absence of these numbers leaves the load-bearing assumption untested in the reported evidence.
- [Verification and Experiments] The iterative controller's convergence relies on the forward models staying inside the basin of attraction under real actuation nonlinearities and contact; no section reports measured model deviation, sensitivity analysis, or exclusion criteria for data regimes in which the models deviate, which directly bears on whether the quantitative guarantee holds without post-hoc tuning.
minor comments (1)
- [Abstract] The abstract would be strengthened by a single sentence stating the achieved position and compliance errors on hardware.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback emphasizing the need for explicit quantitative support of the central modeling and control claims. We address each major comment below and will revise the manuscript to strengthen the evidence.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'the task-space compliance and kinematics models and the control law are derived and verified on both the physical arm and a matched simulation' and that the demonstrated tasks succeeded is not accompanied by any quantitative residual-error metrics (position RMSE, stiffness error, or convergence statistics of the iterative solver) or by any description of how model mismatch arising from pneumatic hysteresis or contact compliance was quantified or mitigated. Because the central claim is that the rigid-backbone-derived models suffice for quantitative real-time control, the absence of these numbers leaves the load-bearing assumption untested in the reported evidence.
Authors: We agree that the abstract would be strengthened by explicit metrics. The manuscript body demonstrates verification via task success on hardware and simulation, but does not foreground numerical residuals in the abstract. In revision we will update the abstract to cite key measured values (position RMSE, stiffness error, and solver iterations) obtained from the physical experiments and add one sentence on mitigation of hysteresis and contact effects through the iterative formulation and per-axis calibration. revision: yes
-
Referee: [Verification and Experiments] The iterative controller's convergence relies on the forward models staying inside the basin of attraction under real actuation nonlinearities and contact; no section reports measured model deviation, sensitivity analysis, or exclusion criteria for data regimes in which the models deviate, which directly bears on whether the quantitative guarantee holds without post-hoc tuning.
Authors: The observation is correct: the present manuscript does not contain an explicit section on measured model deviation or sensitivity. Task-level demonstrations are used to indicate that the models remain sufficiently accurate for the reported controllers. We will add a dedicated subsection (or appendix) reporting quantitative model-to-hardware deviation under varying loads and contact, a sensitivity study on key parameters (e.g., muscle hysteresis coefficients), and explicit exclusion criteria for operating regimes. revision: yes
Circularity Check
No circularity: task-space models derived from rigid backbone geometry, controller verified independently on hardware.
full rationale
The paper derives task-space kinematics and compliance models directly from the rigid articulated backbone geometry and antagonistic actuation, then presents a unified iterative IK/IC controller based on those models. Verification occurs on physical hardware and matched simulation, with no indication that any reported performance metric or control law reduces by construction to parameters fitted from the same experimental runs. No self-citation chains, ansatzes smuggled via prior work, or renaming of known results appear in the provided text. The central claim rests on the accuracy of the first-principles rigid-backbone models under real actuation, which is an external assumption rather than a definitional loop. This is the normal case of a self-contained derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Task-space kinematics and compliance models derived from the rigid-link geometry remain accurate enough for real-time iterative control under contact.
Reference graph
Works this paper leans on
-
[1]
Quasi-static assembly of compliantly supported rigid parts,
D. E. Whitney, “Quasi-static assembly of compliantly supported rigid parts,”Journal of Dynamic Systems, Measurement, and Control, vol. 104, no. 1, pp. 65–77, 1982
1982
-
[2]
Impedance control: An approach to manipulation,
N. Hogan, “Impedance control: An approach to manipulation,” in1984 American control conference. IEEE, 1984, pp. 304–313
1984
-
[3]
Variable impedance actuators: A review,
B. Vanderborght, A. Albu-Sch ¨affer, A. Bicchi, E. Burdet, D. G. Cald- well, R. Carloni, M. Catalano, O. Eiberger, W. Friedl, G. Ganeshet al., “Variable impedance actuators: A review,”Robotics and autonomous systems, vol. 61, no. 12, pp. 1601–1614, 2013
2013
-
[4]
Design, fabrication and control of soft robots,
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, vol. 521, no. 7553, pp. 467–475, 2015
2015
-
[5]
Control strategies for soft robotic manipulators: A survey,
T. G. Thuruthel, Y . Ansari, E. Falotico, and C. Laschi, “Control strategies for soft robotic manipulators: A survey,”Soft Robotics, vol. 5, no. 2, pp. 149–163, 2018
2018
-
[6]
Passive compliance control of redun- dant serial manipulators,
J. J. Rice and J. M. Schimmels, “Passive compliance control of redun- dant serial manipulators,”Journal of Mechanisms and Robotics, vol. 10, no. 4, p. 044507, 2018
2018
-
[7]
A reduced- complexity description of arm endpoint stiffness with applications to teleimpedance control,
A. Ajoudani, C. Fang, N. G. Tsagarakis, and A. Bicchi, “A reduced- complexity description of arm endpoint stiffness with applications to teleimpedance control,” in2015 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2015, pp. 1017–1023
2015
-
[8]
Cartesian stiffness shaping of compliant robots—incremental learning and optimization based on sequential quadratic programming,
N. Kne ˇzevi´c, M. Petrovi´c, and K. Jovanovi´c, “Cartesian stiffness shaping of compliant robots—incremental learning and optimization based on sequential quadratic programming,”Actuators, vol. 13, no. 1, p. 32, 2024
2024
-
[9]
Constraint-based equilib- rium and stiffness control of variable stiffness actuators,
M. Howard, D. J. Braun, and S. Vijayakumar, “Constraint-based equilib- rium and stiffness control of variable stiffness actuators,” in2011 IEEE International Conference on Robotics and Automation. IEEE, 2011, pp. 5554–5560
2011
-
[10]
Variable stiffness actuators: Review on design and components,
S. Wolf, G. Grioli, O. Eiberger, W. Friedl, M. Grebenstein, H. H ¨oppner, E. Burdet, D. G. Caldwell, R. Carloni, M. G. Catalano, D. Lefeber, S. Stramigioli, N. Tsagarakis, M. Van Damme, R. Van Ham, B. Vander- borght, L. C. Visser, A. Bicchi, and A. Albu-Sch¨affer, “Variable stiffness actuators: Review on design and components,”IEEE/ASME Transactions on Me...
2016
-
[11]
A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery,
Y .-J. Kim, S. Cheng, S. Kim, and K. Iagnemma, “A novel layer jamming mechanism with tunable stiffness capability for minimally invasive surgery,”IEEE Transactions on Robotics, vol. 29, no. 4, pp. 1031–1042, 2013
2013
-
[12]
Universal robotic gripper based on the jamming of granular material,
E. Brown, N. Rodenberg, J. Amend, A. Mozeika, E. Steltz, M. R. Zakin, H. Lipson, and H. M. Jaeger, “Universal robotic gripper based on the jamming of granular material,”Proceedings of the National Academy of Sciences, vol. 107, no. 44, pp. 18 809–18 814, 2010
2010
-
[13]
A variable-stiffness robotic link based on rotating- rectangle auxetic structures for safe human-robot interaction,
Y . Ma and D. Bruder, “A variable-stiffness robotic link based on rotating- rectangle auxetic structures for safe human-robot interaction,”IEEE Robotics and Automation Letters, vol. 10, no. 11, pp. 11 554–11 561, 2025
2025
-
[14]
A programmably compliant origami mechanism for dynamically dexterous robots,
W.-H. Chen, S. Misra, Y . Gao, Y .-J. Lee, D. E. Koditschek, S. Yang, and C. R. Sung, “A programmably compliant origami mechanism for dynamically dexterous robots,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2131–2137, 2020
2020
-
[15]
The fluid jacobian: Modeling force-motion relationships in fluid-driven soft robots,
C. D. Remy, Z. Brei, D. Bruder, J. Remy, K. Buffinton, and R. B. Gillespie, “The fluid jacobian: Modeling force-motion relationships in fluid-driven soft robots,”The International Journal of Robotics Research, p. 02783649231210592, 2023
2023
-
[16]
Increasing the payload capacity of soft robot arms by localized stiffening,
D. Bruder, M. A. Graule, C. B. Teeple, and R. J. Wood, “Increasing the payload capacity of soft robot arms by localized stiffening,”Science Robotics, vol. 8, no. 81, p. eadf9001, 2023
2023
-
[17]
Prescribing cartesian stiffness of soft robots by co-optimization of shape and segment-level stiffness,
F. Stella, J. Hughes, D. Rus, and C. Della Santina, “Prescribing cartesian stiffness of soft robots by co-optimization of shape and segment-level stiffness,”Soft Robotics, vol. 10, no. 4, pp. 701–712, 2023
2023
-
[18]
Design and kinematic modeling of constant curvature continuum robots: A review,
R. J. Webster III and B. A. Jones, “Design and kinematic modeling of constant curvature continuum robots: A review,”The International Journal of Robotics Research, vol. 29, no. 13, pp. 1661–1683, 2010
2010
-
[19]
Continuum robot stiffness under external loads and prescribed tendon displacements,
K. Oliver-Butler, J. Till, and C. Rucker, “Continuum robot stiffness under external loads and prescribed tendon displacements,”IEEE Transactions on Robotics, vol. 35, no. 2, pp. 403–419, 2019
2019
-
[20]
UMArm: Untethered, modular, portable, soft pneumatic arm,
R. Zuo, D. H. Han, R. Li, S. Jamal, and D. Bruder, “UMArm: Untethered, modular, portable, soft pneumatic arm,”arXiv preprint arXiv:2505.11476, 2025
-
[21]
A modal approach to hyper- redundant manipulator kinematics,
G. S. Chirikjian and J. W. Burdick, “A modal approach to hyper- redundant manipulator kinematics,”IEEE Transactions on Robotics and Automation, vol. 10, no. 3, pp. 343–354, 1994
1994
-
[22]
Modelling of the mckibben artificial muscle: A review,
B. Tondu, “Modelling of the mckibben artificial muscle: A review,” Journal of Intelligent Material Systems and Structures, vol. 23, no. 3, pp. 225–253, 2012
2012
-
[23]
Force generation by parallel combinations of fiber-reinforced fluid-driven actuators,
D. Bruder, A. Sedal, R. Vasudevan, and C. D. Remy, “Force generation by parallel combinations of fiber-reinforced fluid-driven actuators,”IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3999–4006, 2018
2018
-
[24]
Embedded valves for distributed control of soft pneumatic actuators,
R. Zuo, M. Mehta, D. H. Han, and D. Bruder, “Embedded valves for distributed control of soft pneumatic actuators,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 8286–8292
2024
-
[25]
K. M. Lynch and F. C. Park,Modern Robotics: Mechanics, Planning, and Control. Cambridge, UK: Cambridge University Press, 2017
2017
-
[26]
Introduction to inverse kinematics with Jacobian transpose, pseudoinverse and damped least squares methods,
S. R. Buss, “Introduction to inverse kinematics with Jacobian transpose, pseudoinverse and damped least squares methods,” Department of Math- ematics, University of California, San Diego, Tech. Rep., 2004
2004
-
[27]
The matrix cookbook,
K. B. Petersen and M. S. Pedersen, “The matrix cookbook,” 2012, technical University of Denmark, Version 20121115
2012
-
[28]
Boyd and L
S. Boyd and L. Vandenberghe,Convex Optimization. Cambridge, UK: Cambridge University Press, 2004
2004
-
[29]
Multi-homotopy class optimal path planning for manipulation with one degree of redundancy,
J. J. Rice and J. M. Schimmels, “Multi-homotopy class optimal path planning for manipulation with one degree of redundancy,”Mechanism and Machine Theory, vol. 149, p. 103834, 2020. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0094114X20300550
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.