Active Learning for Channel Knowledge Map Construction via Bayesian Inference Diffusion Models
Pith reviewed 2026-06-30 05:29 UTC · model grok-4.3
The pith
An active learning diffusion framework selects sampling points for channel gain maps using epistemic uncertainty estimates from the reverse diffusion process.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
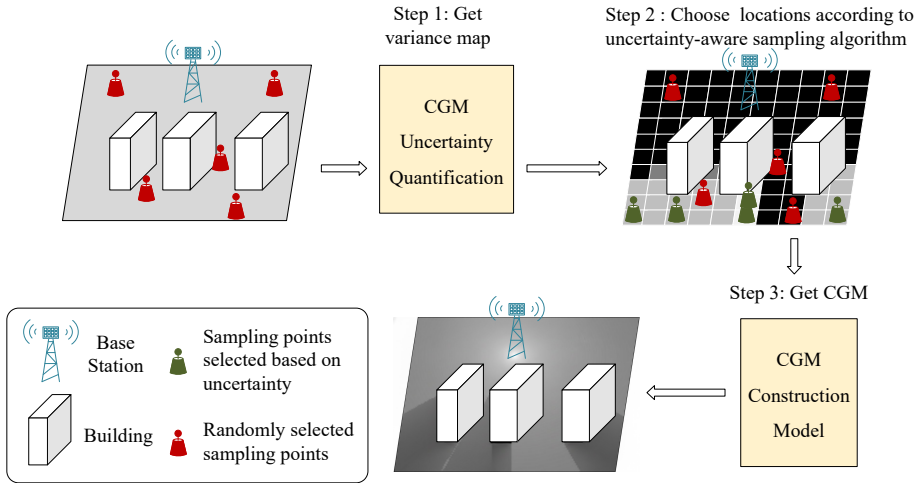
By embedding Bayesian inference inside the diffusion model, the framework generates reliable element-wise epistemic uncertainty maps along the reverse process and uses these maps inside an uncertainty-aware sampling strategy that jointly accounts for uncertainty magnitude and spatial distribution uniformity to choose the next sampling points.
What carries the argument
Bayesian-inference diffusion model that supplies element-wise epistemic uncertainty along the reverse diffusion process, feeding an uncertainty-aware sampling strategy.
If this is right
- Limited sampling budgets are allocated away from spatially redundant regions.
- CGM accuracy improves in both static and time-varying wireless settings.
- Environment-aware network functions receive higher-fidelity location-specific channel data.
Where Pith is reading between the lines
- The same uncertainty-guided selection could be applied to other channel knowledge map types such as delay or angle maps.
- Real deployments could reduce the density of measurement campaigns while maintaining target reconstruction quality.
- The framework might be combined with online adaptation when new propagation statistics appear.
Load-bearing premise
The diffusion model yields trustworthy element-wise epistemic uncertainty estimates during the reverse process without retraining, and combining that uncertainty with spatial uniformity correctly identifies the most informative new locations.
What would settle it
A controlled test in which the method is applied to propagation environments whose statistical structure differs markedly from the training data and reconstruction error fails to improve over non-uncertainty baselines.
Figures
read the original abstract
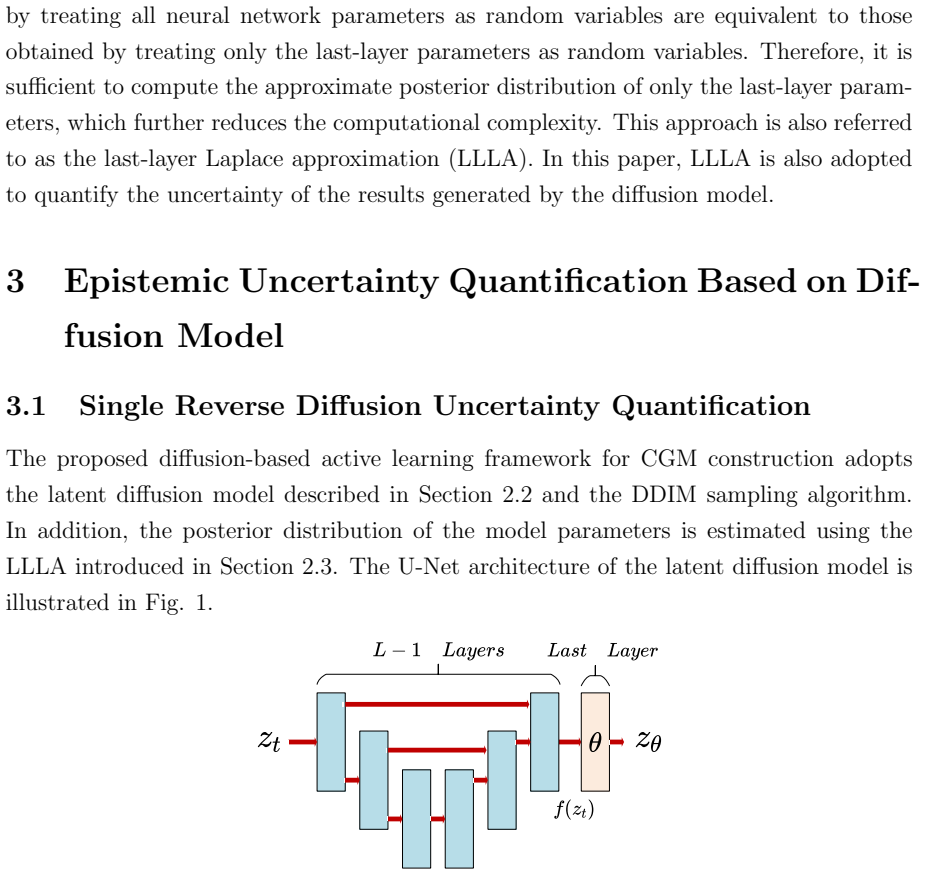
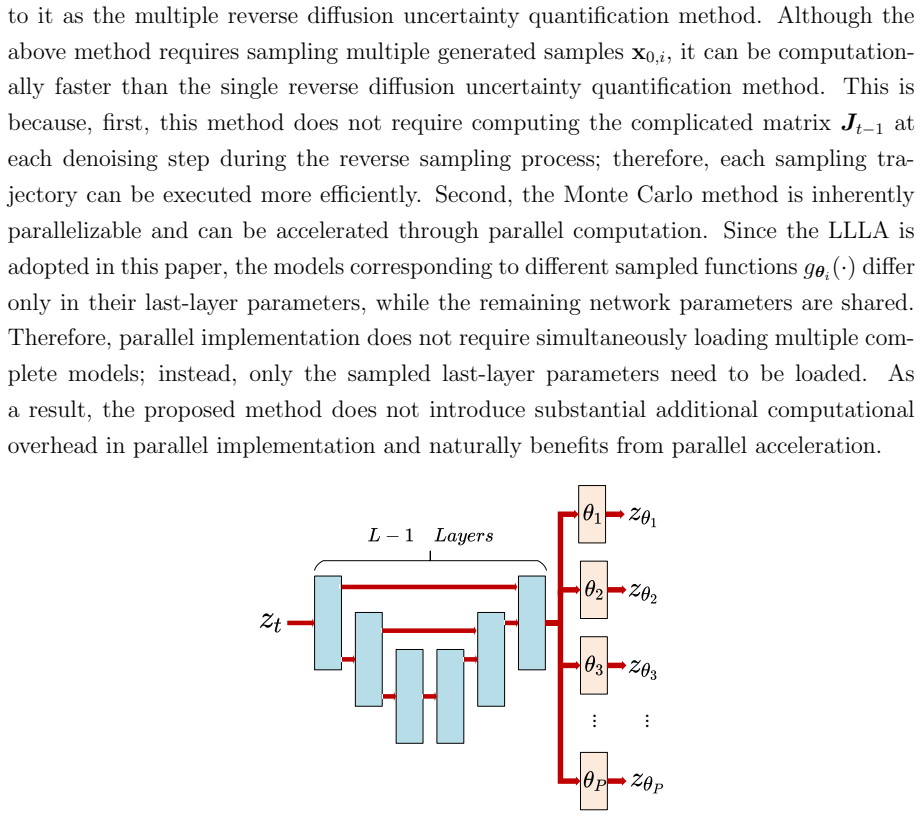
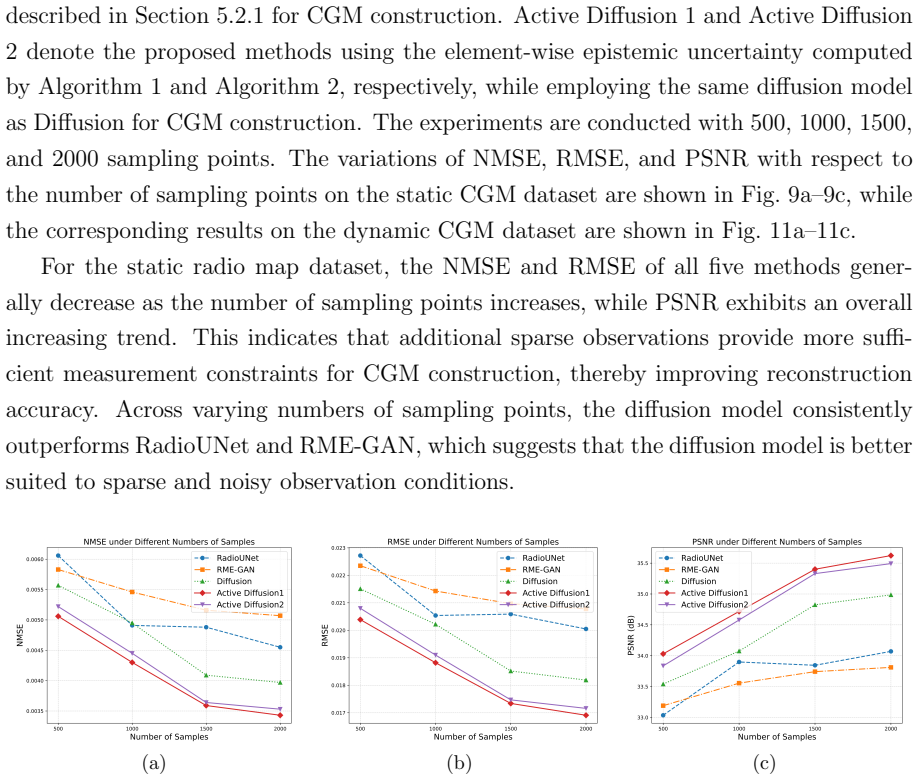
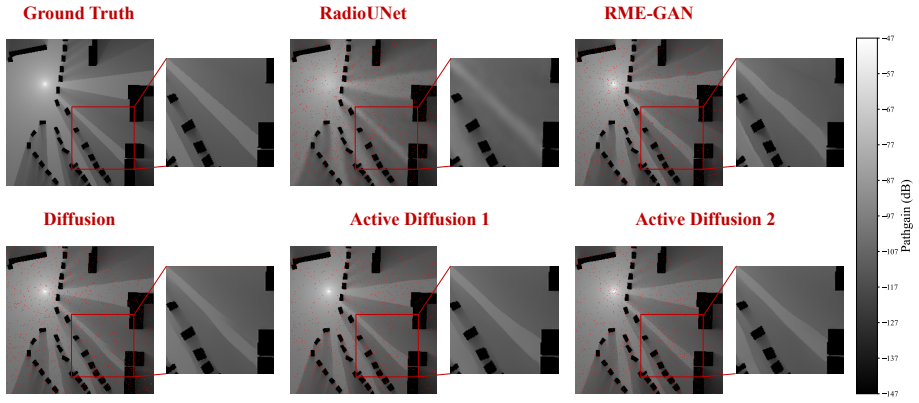
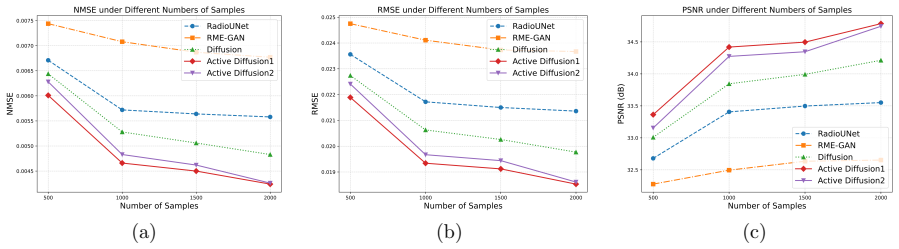
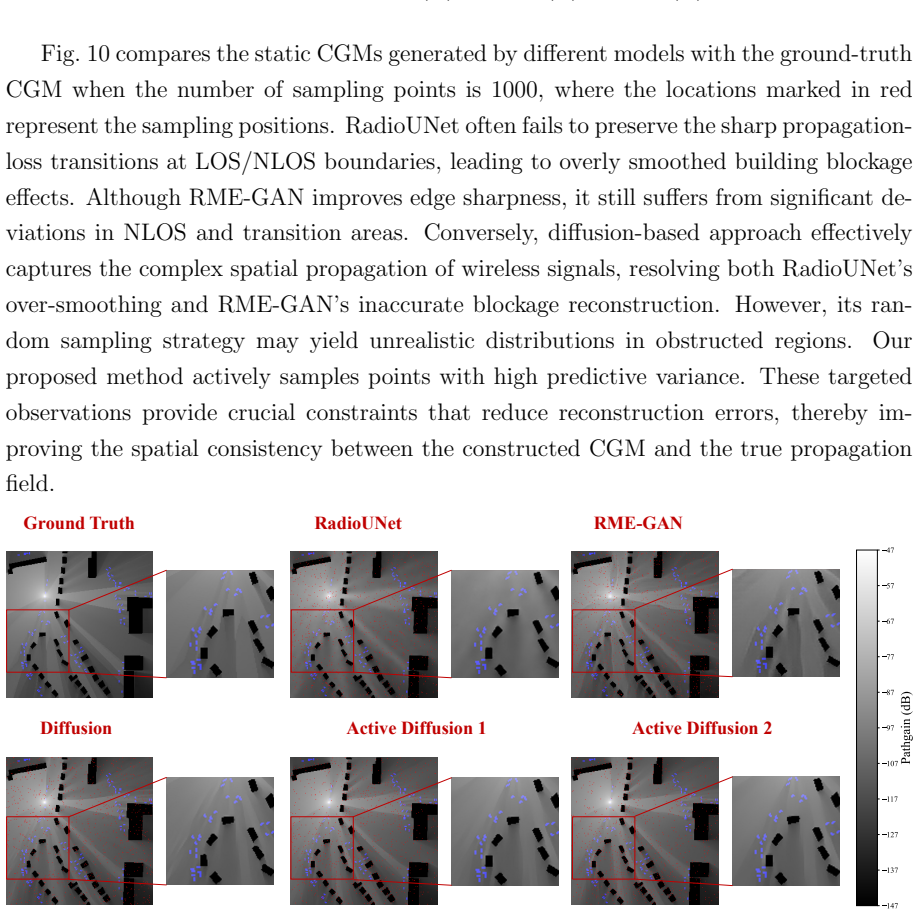
Channel knowledge maps (CKMs) are regarded as key enablers of environment-aware communications in future wireless networks, as they provide location-specific channel information by establishing an explicit connection between wireless devices and the physical propagation environment. As a representative CKM, the channel gain map (CGM) characterizes the spatial distributions of large-scale fading to support wireless environment awareness and network optimization. Existing CGM construction methods generally lack a well-defined sampling-point acquisition strategy, which may result in a limited number of sampling points being allocated to spatially redundant or highly predictable regions, thereby degrading CGM reconstruction performance in complex propagation environments. In this paper, we propose an active-learning-based diffusion framework for efficient CGM construction. By combining Bayesian inference with the diffusion model, the proposed method estimates epistemic uncertainty without retraining the model. Two uncertainty quantification algorithms are further developed along the reverse diffusion process to generate element-wise epistemic uncertainty maps. Furthermore, an uncertainty-aware sampling strategy is designed to determine new observation locations by jointly considering epistemic uncertainty and spatial distribution uniformity. Experimental results on both static and dynamic CGM datasets demonstrate that the proposed method achieves better reconstruction performance than baseline methods. These results indicate that the proposed method can effectively improve the utilization efficiency of limited sampling points and enhance the accuracy of CGM construction in complex wireless propagation environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an active-learning framework for channel gain map (CGM) construction that combines Bayesian inference with diffusion models. It claims to estimate element-wise epistemic uncertainty along the reverse diffusion process without retraining, develops two uncertainty quantification algorithms, designs an uncertainty-aware sampling strategy that jointly considers epistemic uncertainty and spatial uniformity, and reports superior reconstruction performance versus baselines on both static and dynamic CGM datasets.
Significance. If the uncertainty estimates prove calibrated and transferable, the framework could improve sampling efficiency for environment-aware wireless systems by directing limited measurements toward high-uncertainty regions. The integration of diffusion-based generative models with active learning for spatial channel maps is a timely direction, though its practical impact hinges on validation of the uncertainty-error relationship.
major comments (2)
- [Abstract] Abstract: the central experimental claim that the method 'achieves better reconstruction performance than baseline methods' is stated without any quantitative metrics, baseline descriptions, dataset sizes, or error values, rendering it impossible to assess whether the data support the performance assertion.
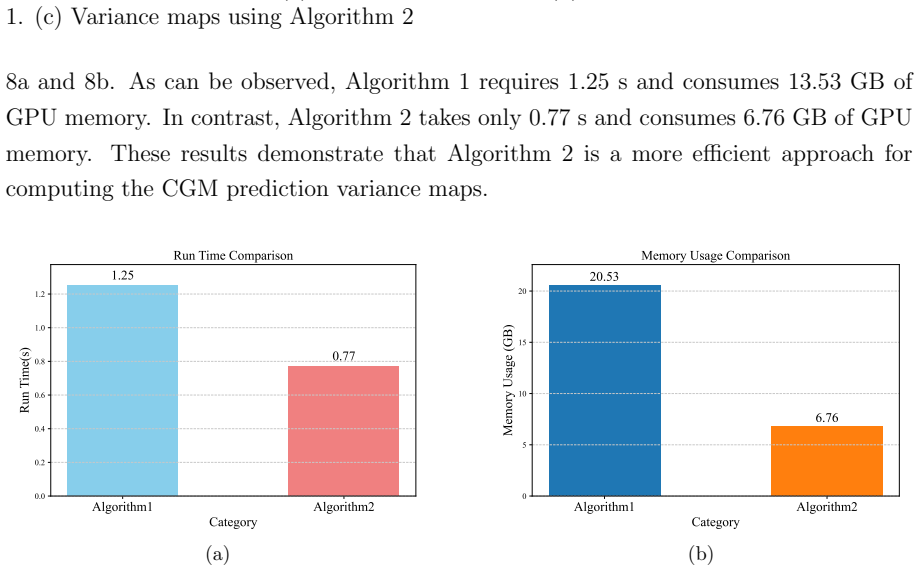
- [Method] Method section (uncertainty quantification along reverse process): the load-bearing assumption that the Bayesian-inference diffusion procedure produces reliable element-wise epistemic uncertainty maps that correlate with actual reconstruction error on unseen propagation environments receives no quantitative check (e.g., Spearman correlation, calibration plot, or ablation removing the uncertainty term), so the justification for the uncertainty-aware sampling strategy remains unverified.
minor comments (1)
- [Abstract] Abstract: the two uncertainty quantification algorithms are mentioned but neither named nor distinguished, leaving their relationship to the reverse diffusion process unclear.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments below and will revise the manuscript to strengthen the presentation of quantitative results and the validation of uncertainty estimates.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central experimental claim that the method 'achieves better reconstruction performance than baseline methods' is stated without any quantitative metrics, baseline descriptions, dataset sizes, or error values, rendering it impossible to assess whether the data support the performance assertion.
Authors: We agree that the abstract would be strengthened by including specific quantitative metrics. In the revised manuscript we will expand the abstract to report concrete reconstruction error values (e.g., NMSE), the names and brief descriptions of the baselines, and the sizes of the static and dynamic CGM datasets used in the experiments. revision: yes
-
Referee: [Method] Method section (uncertainty quantification along reverse process): the load-bearing assumption that the Bayesian-inference diffusion procedure produces reliable element-wise epistemic uncertainty maps that correlate with actual reconstruction error on unseen propagation environments receives no quantitative check (e.g., Spearman correlation, calibration plot, or ablation removing the uncertainty term), so the justification for the uncertainty-aware sampling strategy remains unverified.
Authors: We acknowledge that a direct quantitative check of the uncertainty-error relationship (e.g., Spearman rank correlation between the generated epistemic uncertainty maps and per-element reconstruction error, or an ablation that disables the uncertainty term) is currently absent and would provide stronger justification for the sampling strategy. While the overall superior reconstruction performance reported in the experiments offers indirect support, we will add the requested calibration analysis and ablation study in the revised manuscript. revision: yes
Circularity Check
No significant circularity; derivation relies on standard diffusion + Bayesian components with external experimental validation
full rationale
The provided abstract and description outline a method that combines Bayesian inference with diffusion models to produce epistemic uncertainty estimates along the reverse process, then uses those for an uncertainty-aware sampling strategy. No equations, definitions, or steps are exhibited that reduce a claimed prediction to a fitted input by construction, nor any self-citation that serves as the sole justification for a uniqueness theorem or ansatz. The central performance claim is tied to experimental results on static and dynamic datasets compared against baselines, which constitutes independent validation rather than a self-referential reduction. This matches the default expectation that most papers are non-circular; the derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Radial basis functions
Christopher M Bishop. Radial basis functions. InNeural Networks for Pattern Recognition. Oxford University Press, 11 1995
1995
-
[2]
Weight uncertainty in neural network
Charles Blundell, Julien Cornebise, Koray Kavukcuoglu, and Daan Wierstra. Weight uncertainty in neural network. InInternational conference on machine learning, pages 1613–1622. PMLR, 2015
2015
-
[3]
Estimating epistemic and aleatoric uncertainty with a single model.Advances in Neural Information Pro- cessing Systems, 37:109845–109870, 2024
Matthew A Chan, Maria J Molina, and Christopher A Metzler. Estimating epistemic and aleatoric uncertainty with a single model.Advances in Neural Information Pro- cessing Systems, 37:109845–109870, 2024
2024
-
[4]
A graph neural network based radio map construction method for urban environment
Guokai Chen, Yongxiang Liu, Tao Zhang, Jianzhao Zhang, Xiye Guo, and Jun Yang. A graph neural network based radio map construction method for urban environment. IEEE Communications Letters, 27(5):1327–1331, 2023
2023
-
[5]
Stochastic gradient hamiltonian monte carlo
Tianqi Chen, Emily Fox, and Carlos Guestrin. Stochastic gradient hamiltonian monte carlo. InInternational conference on machine learning, pages 1683–1691. PMLR, 2014
2014
-
[6]
A method to reconstruct coverage loss maps based on matrix completion and adaptive sampling
Symeon Chouvardas, Stefan Valentin, Moez Draief, and Mathieu Leconte. A method to reconstruct coverage loss maps based on matrix completion and adaptive sampling. In2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 6390–6394, 2016
2016
-
[7]
Generating ckm using others’ data: Cross-ap ckm inference with deep learning.IEEE Transactions on Vehicular Technology, 75(2):3360–3365, 2026
Zhuoyin Dai, Di Wu, Xiaoli Xu, and Yong Zeng. Generating ckm using others’ data: Cross-ap ckm inference with deep learning.IEEE Transactions on Vehicular Technology, 75(2):3360–3365, 2026
2026
-
[8]
Laplace redux-effortless bayesian deep learning
Erik Daxberger, Agustinus Kristiadi, Alexander Immer, Runa Eschenhagen, Matthias Bauer, and Philipp Hennig. Laplace redux-effortless bayesian deep learning. Advances in neural information processing systems, 34:20089–20103, 2021. 30
2021
-
[9]
Learning to communicate in uav-aided wireless networks: Map-based approaches.IEEE Internet of Things Journal, 6(2):1791–1802, 2019
Omid Esrafilian, Rajeev Gangula, and David Gesbert. Learning to communicate in uav-aided wireless networks: Map-based approaches.IEEE Internet of Things Journal, 6(2):1791–1802, 2019
2019
-
[10]
Shen Fu, Yong Zeng, Zijian Wu, Di Wu, Shi Jin, Cheng-Xiang Wang, and Xiqi Gao. Ckmdiff: A generative diffusion model for ckm construction via inverse problems with learned priors.arXiv preprint arXiv:2504.17323, 2025
-
[11]
Dropout as a bayesian approximation: Repre- senting model uncertainty in deep learning
Yarin Gal and Zoubin Ghahramani. Dropout as a bayesian approximation: Repre- senting model uncertainty in deep learning. Ininternational conference on machine learning, pages 1050–1059. PMLR, 2016
2016
-
[12]
Probabilistic backpropagation for scalable learning of bayesian neural networks
Jos´ e Miguel Hern´ andez-Lobato and Ryan Adams. Probabilistic backpropagation for scalable learning of bayesian neural networks. InInternational conference on machine learning, pages 1861–1869. PMLR, 2015
2015
-
[13]
Denoising diffusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models. Advances in neural information processing systems, 33:6840–6851, 2020
2020
-
[14]
Channel knowledge map construction via guided flow matching.arXiv preprint arXiv:2601.06156, 2026
Ziyu Huang, Yong Zeng, Shen Fu, Xiaoli Xu, and Hongyang Du. Channel knowledge map construction via guided flow matching.arXiv preprint arXiv:2601.06156, 2026
-
[15]
Being bayesian, even just a bit, fixes overconfidence in relu networks
Agustinus Kristiadi, Matthias Hein, and Philipp Hennig. Being bayesian, even just a bit, fixes overconfidence in relu networks. InInternational conference on machine learning, pages 5436–5446. PMLR, 2020
2020
-
[16]
Simple and scal- able predictive uncertainty estimation using deep ensembles.Advances in neural information processing systems, 30, 2017
Balaji Lakshminarayanan, Alexander Pritzel, and Charles Blundell. Simple and scal- able predictive uncertainty estimation using deep ensembles.Advances in neural information processing systems, 30, 2017
2017
-
[17]
Ju-Hyung Lee and Andreas F. Molisch. A scalable and generalizable pathloss map prediction.IEEE Transactions on Wireless Communications, 23(11):17793–17806, 2024
2024
-
[18]
Pathloss prediction using deep learning with applications to cellular optimization and efficient d2d link scheduling
Ron Levie, Cagkan Yapar, Gitta Kutyniok, and Giuseppe Caire. Pathloss prediction using deep learning with applications to cellular optimization and efficient d2d link scheduling. InICASSP 2020 - 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 8678–8682, 2020
2020
-
[19]
Radiounet: Fast radio map estimation with convolutional neural networks.IEEE Transactions on Wireless Communications, 20(6):4001–4015, 2021
Ron Levie, Cagkan Yapar, Gitta Kutyniok, and Giuseppe Caire. Radiounet: Fast radio map estimation with convolutional neural networks.IEEE Transactions on Wireless Communications, 20(6):4001–4015, 2021. 31
2021
-
[20]
Automatic indoor radio map construction and localization via multipath fingerprint extrapolation.IEEE Trans- actions on Wireless Communications, 22(9):5814–5827, 2023
Qiao Li, Xuewen Liao, Ang Li, and Shahrokh Valaee. Automatic indoor radio map construction and localization via multipath fingerprint extrapolation.IEEE Trans- actions on Wireless Communications, 22(9):5814–5827, 2023
2023
-
[21]
Xiaojie Li, Songyang Zhang, Hang Li, Xiaoyang Li, Lexi Xu, Haigao Xu, Hui Mei, Guangxu Zhu, Nan Qi, and Ming Xiao. Radiogat: A joint model-based and data- driven framework for multi-band radiomap reconstruction via graph attention net- works.IEEE Transactions on Wireless Communications, 23(11):17777–17792, 2024
2024
-
[22]
Rmtransformer: Accu- rate radio map construction and coverage prediction
Yuxuan Li, Cheng Zhang, Wen Wang, and Yongming Huang. Rmtransformer: Accu- rate radio map construction and coverage prediction. In2025 IEEE 101st Vehicular Technology Conference (VTC2025-Spring), pages 1–5, 2025
2025
-
[23]
Sparsely self-supervised generative adversarial nets for radio frequency estimation.IEEE Journal on Selected Areas in Communications, 37(11):2428–2442, 2019
Zhuo Li, Jiannong Cao, Hongwei Wang, and Miao Zhao. Sparsely self-supervised generative adversarial nets for radio frequency estimation.IEEE Journal on Selected Areas in Communications, 37(11):2428–2442, 2019
2019
-
[24]
An adaptive inverse-distance weighting spatial interpolation technique.Computers & Geosciences, 34:1044–1055, 2008
George Y Lu and David W Wong. An adaptive inverse-distance weighting spatial interpolation technique.Computers & Geosciences, 34:1044–1055, 2008
2008
-
[25]
Polyzos, Alireza Sadeghi, Wei Ye, Steven Sleder, Kodjo Houssou, Jeff Calder, Zhi-Li Zhang, and Georgios B
Konstantinos D. Polyzos, Alireza Sadeghi, Wei Ye, Steven Sleder, Kodjo Houssou, Jeff Calder, Zhi-Li Zhang, and Georgios B. Giannakis. Bayesian active learning for sample efficient 5G radio map reconstruction.IEEE Transactions on Wireless Communications, 23(12):19382–19396, 2024
2024
-
[26]
A scalable laplace approxi- mation for neural networks
Hippolyt Ritter, Aleksandar Botev, and David Barber. A scalable laplace approxi- mation for neural networks. InInternational conference on learning representations, 2018
2018
-
[27]
Blattmann, Dominik Lorenz, Patrick Esser, and Bj¨ orn Ommer
Robin Rombach, A. Blattmann, Dominik Lorenz, Patrick Esser, and Bj¨ orn Ommer. High-resolution image synthesis with latent diffusion models.2022 IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), pages 10674–10685, 2021
2022
-
[28]
Rem-u-net: Deep learning based agile rem prediction with energy-efficient cell-free use case.IEEE Open Journal of Signal Processing, 5:750–765, 2024
Hazem Sallouha, Shamik Sarkar, Enes Krijestorac, and Danijela Cabric. Rem-u-net: Deep learning based agile rem prediction with energy-efficient cell-free use case.IEEE Open Journal of Signal Processing, 5:750–765, 2024
2024
-
[29]
Denoising Diffusion Implicit Models
Jiaming Song, Chenlin Meng, and Stefano Ermon. Denoising diffusion implicit mod- els.ArXiv, abs/2010.02502, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[30]
Deep completion autoencoders for radio map estimation.IEEE Transactions on Wireless Communications, 21(3):1710–1724, 2022
Yves Teganya and Daniel Romero. Deep completion autoencoders for radio map estimation.IEEE Transactions on Wireless Communications, 21(3):1710–1724, 2022. 32
2022
-
[31]
Learning radio maps for physical-layer security in the radio access
Zoran Utkovski, Patrick Agostini, Matthias Frey, Igor Bjelakovic, and Slawomir Stanczak. Learning radio maps for physical-layer security in the radio access. In 2019 IEEE 20th International Workshop on Signal Processing Advances in Wireless Communications (SPA WC), pages 1–5, 2019
2019
-
[32]
van Beers and J.P.C
W.C.M. van Beers and J.P.C. Kleijnen. Kriging interpolation in simulation: a survey. InProceedings of the 2004 Winter Simulation Conference, 2004., volume 1, page 121, 2004
2004
-
[33]
Novel localization technique for next generation base stations using radio maps
Satya Kumar Vankayala, Kuldeep Sharma, Sai Krishna Santosh Gollapudi, Sukhdeep Singh, Nawab Mohammad Faseeh Qureshi, and Seungil Yoon. Novel localization technique for next generation base stations using radio maps. In2022 IEEE Globecom Workshops (GC Wkshps), pages 783–788, 2022
2022
-
[34]
Xiucheng Wang, Keda Tao, Nan Cheng, Zhisheng Yin, Zan Li, Yuan Zhang, and Xuemin Shen. Radiodiff: An effective generative diffusion model for sampling-free dynamic radio map construction.IEEE Transactions on Cognitive Communications and Networking, 11(2):738–750, 2025
2025
-
[35]
Xiucheng Wang, Qiming Zhang, Nan Cheng, Ruijin Sun, Zan Li, Shuguang Cui, and Xuemin Shen. Radiodiff-k2: Helmholtz equation informed generative diffusion model for multi-path aware radio map construction.IEEE Journal on Selected Areas in Communications, 44:2318–2333, 2026
2026
-
[36]
How much data is needed for channel knowledge map con- struction?IEEE Transactions on Wireless Communications, 23(10):13011–13021, 2024
Xiaoli Xu and Yong Zeng. How much data is needed for channel knowledge map con- struction?IEEE Transactions on Wireless Communications, 23(10):13011–13021, 2024
2024
-
[37]
Dataset of pathloss and toa radio maps with localization application, 2022
Cagkan Yapar, Ron Levie, Gitta Kutyniok, and Giuseppe Caire. Dataset of pathloss and toa radio maps with localization application, 2022
2022
-
[38]
A tutorial on environment-aware commu- nications via channel knowledge map for 6g.IEEE Communications Surveys and Tutorials, 26:1478–1519, 2024
Yong Zeng, Junting Chen, Jie Xu, Di Wu, Xiaoli Xu, Shi Jin, Xiqi Gao, David Gesbert, Shuguang Cui, and Rui Zhang. A tutorial on environment-aware commu- nications via channel knowledge map for 6g.IEEE Communications Surveys and Tutorials, 26:1478–1519, 2024
2024
-
[39]
Toward environment-aware 6g communications via channel knowledge map.IEEE Wireless Communications, 28:84–91, 6 2021
Yong Zeng and Xiaoli Xu. Toward environment-aware 6g communications via channel knowledge map.IEEE Wireless Communications, 28:84–91, 6 2021
2021
-
[40]
Simultaneous navigation and radio mapping for cellular-connected uav with deep reinforcement learning.IEEE Trans- actions on Wireless Communications, 20(7):4205–4220, 2021
Yong Zeng, Xiaoli Xu, Shi Jin, and Rui Zhang. Simultaneous navigation and radio mapping for cellular-connected uav with deep reinforcement learning.IEEE Trans- actions on Wireless Communications, 20(7):4205–4220, 2021. 33
2021
-
[41]
Radio map-based 3d path planning for cellular- connected uav.IEEE Transactions on Wireless Communications, 20(3):1975–1989, 2021
Shuowen Zhang and Rui Zhang. Radio map-based 3d path planning for cellular- connected uav.IEEE Transactions on Wireless Communications, 20(3):1975–1989, 2021
1975
-
[42]
Rme-gan: A learning frame- work for radio map estimation based on conditional generative adversarial network
Songyang Zhang, Achintha Wijesinghe, and Zhi Ding. Rme-gan: A learning frame- work for radio map estimation based on conditional generative adversarial network. IEEE Internet of Things Journal, 10(20):18016–18027, 2023
2023
-
[43]
Han Zou, Chun-Lin Chen, Maoxun Li, Jianfei Yang, Yuxun Zhou, Lihua Xie, and Costas J. Spanos. Adversarial learning-enabled automatic wifi indoor radio map construction and adaptation with mobile robot.IEEE Internet of Things Journal, 7(8):6946–6954, 2020. 34
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.