Scalable Intention Sharing for ETSI VAMs
Pith reviewed 2026-06-30 04:00 UTC · model grok-4.3
The pith
Uncertainty ellipses reduce V2X maneuver prediction complexity by an order of magnitude while keeping message size constant.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Encoding maneuvers as uncertainty ellipses instead of trajectory vectors or N-polygons yields an order-of-magnitude drop in computational complexity at constant message size; EKF-generated ellipse forecasts from GNSS data sustain reliable multisecond horizons suitable for scalable ETSI VAM intention sharing.
What carries the argument
Uncertainty ellipses as geometric encodings of predicted maneuvers, generated via an Extended Kalman Filter pipeline from GNSS trajectories.
If this is right
- Message sizes stay fixed regardless of how far ahead the prediction horizon extends.
- Neighborhood-scale coordination becomes feasible because per-vehicle compute no longer grows with the number of neighbors.
- ETSI VAM implementations can adopt ellipse encoding without changing existing message formats or bandwidth budgets.
- Multisecond reliable forecasts become available for cooperative maneuvers without proportional increases in processing load.
Where Pith is reading between the lines
- The same ellipse encoding could be tested on car or truck trajectories to check whether cyclist-derived filter parameters transfer.
- Integration with existing ETSI CAM or DENM messages might allow intention sharing without new VAM message types.
- If ellipses prove robust under packet loss, they could reduce reliance on frequent retransmissions in congested channels.
Load-bearing premise
Simulated CPU measurements on controlled-track cyclist GNSS data will generalize to dense real-world V2X scenes that include mixed vehicle types, occlusions, and packet losses.
What would settle it
Measure CPU time and prediction accuracy when running the ellipse pipeline on live mixed-traffic urban GNSS traces with realistic communication dropouts; if complexity rises above vector methods or accuracy collapses before two seconds, the scalability claim fails.
Figures
read the original abstract
Efficient maneuver coordination in dense V2X environments requires accurate short-term prediction while maintaining low communication and computational overhead. Current European Telecommunications Standards Institute (ETSI)-compliant approaches rely on intention detection and trajectory vector transmission, which scale poorly with neighborhood size and prediction horizon. This paper revisits maneuver coordination from an intention sharing perspective and investigates geometric encodings that enable scalable communication. First, we analyze three ETSI-compliant encodings, trajectory vectors, N-polygons, and uncertainty ellipses, through complexity analysis and simulation-based CPU measurements. Results show that uncertainty ellipses reduce computational complexity by an order of magnitude compared with trajectory vectors while maintaining a constant message size. Building on this, an Extended Kalman Filter is used to generate short-horizon predictions, which are encoded as uncertainty ellipses to represent the intended maneuver. The prediction pipeline is evaluated using real-world GNSS trajectories collected from cyclist maneuvers on a controlled test track, demonstrating that the approach achieves reliable multisecond prediction horizons while maintaining scalability for dense V2X environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper analyzes three ETSI-compliant encodings for VAM intention sharing (trajectory vectors, N-polygons, uncertainty ellipses) via complexity analysis and CPU simulations, claiming ellipses achieve an order-of-magnitude complexity reduction at constant message size. It then applies an EKF to predict short-horizon maneuvers encoded as uncertainty ellipses and evaluates the pipeline on real GNSS cyclist trajectories from a controlled test track, reporting reliable multisecond prediction horizons and overall scalability for dense V2X.
Significance. If the complexity reduction and prediction reliability hold under broader conditions, the work could support more scalable maneuver coordination in ETSI V2X systems by replacing variable-length trajectory vectors with fixed-size geometric encodings. The simulation-based CPU comparison and use of real GNSS data are concrete strengths; however, the absence of mixed-traffic or lossy-channel experiments limits immediate applicability claims.
major comments (3)
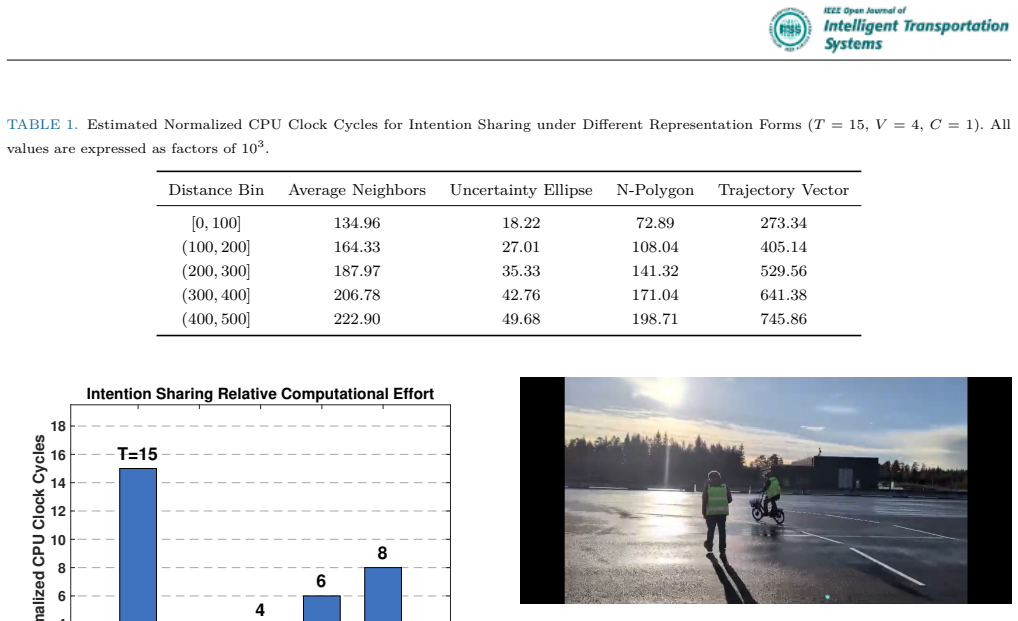
- [§4] §4 (Simulation results): The reported ~10× CPU reduction for ellipses versus trajectory vectors is measured in a single-class, lossless setting; no ablation varies neighborhood size, prediction horizon, or packet-loss rate, so the scalability claim for dense V2X environments rests on an untested extrapolation.
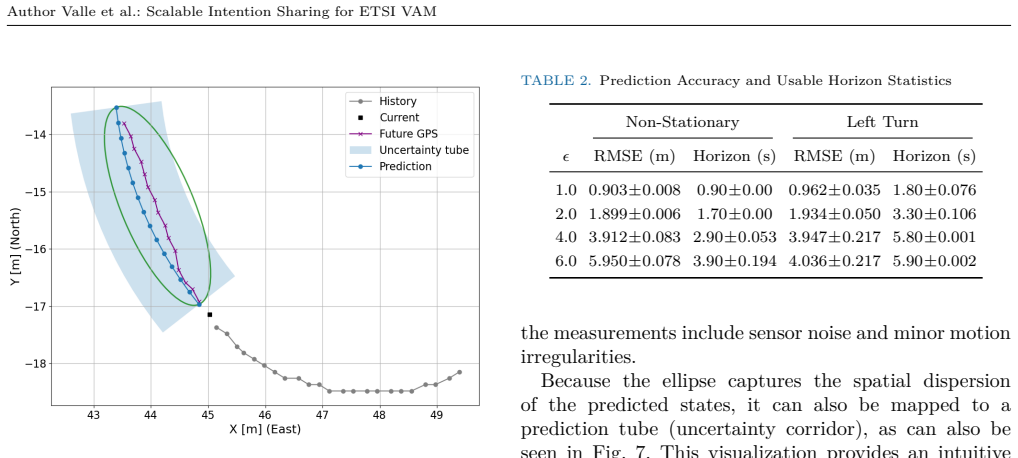
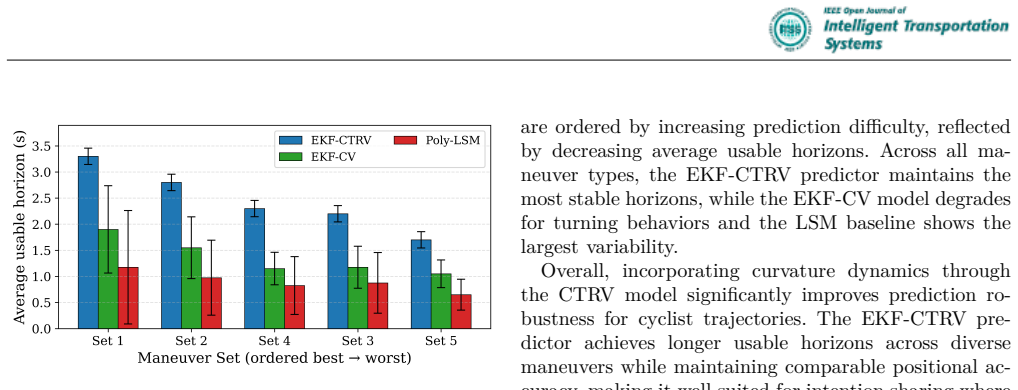
- [§5] §5 (EKF evaluation): The multisecond prediction reliability is demonstrated only on controlled-track cyclist GNSS traces; the manuscript provides neither dataset cardinality, cross-validation procedure, nor quantitative error metrics (e.g., mean ellipse overlap or position RMSE with confidence intervals), making the “reliable” claim difficult to assess.
- [Abstract & §6] Abstract & §6 (Conclusions): The assertion that the method “maintains scalability for dense V2X environments” is not supported by any experiment that includes mixed vehicle/pedestrian classes, occlusions, or communication losses—the weakest assumption identified in the stress-test note.
minor comments (2)
- Notation for the three encodings is introduced without a consolidated table; a single comparison table listing message size, complexity order, and prediction method would improve readability.
- The EKF state vector and measurement model are described only at high level; explicit equations for the ellipse covariance propagation would allow readers to reproduce the prediction step.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope and limitations of our work. We respond point-by-point to the major comments below.
read point-by-point responses
-
Referee: [§4] §4 (Simulation results): The reported ~10× CPU reduction for ellipses versus trajectory vectors is measured in a single-class, lossless setting; no ablation varies neighborhood size, prediction horizon, or packet-loss rate, so the scalability claim for dense V2X environments rests on an untested extrapolation.
Authors: The complexity analysis in §4 is general and shows that uncertainty ellipses yield constant message size (O(1)) independent of neighborhood size or horizon length, unlike trajectory vectors whose size scales with these factors. The CPU simulations confirm an order-of-magnitude reduction in a representative setting. We agree that the simulations were performed without packet loss or multi-class variation and that explicit ablations would strengthen the dense-V2X claim. We will add discussion in §4 and §6 explicitly stating the modeling assumptions and noting that future lossy-channel evaluations are needed. revision: partial
-
Referee: [§5] §5 (EKF evaluation): The multisecond prediction reliability is demonstrated only on controlled-track cyclist GNSS traces; the manuscript provides neither dataset cardinality, cross-validation procedure, nor quantitative error metrics (e.g., mean ellipse overlap or position RMSE with confidence intervals), making the “reliable” claim difficult to assess.
Authors: We acknowledge the need for more rigorous reporting. The revised §5 will report the exact dataset cardinality, describe the cross-validation procedure, and include quantitative metrics such as position RMSE with confidence intervals together with ellipse-overlap statistics across the prediction horizon. These additions will make the reliability assessment reproducible. revision: yes
-
Referee: [Abstract & §6] Abstract & §6 (Conclusions): The assertion that the method “maintains scalability for dense V2X environments” is not supported by any experiment that includes mixed vehicle/pedestrian classes, occlusions, or communication losses—the weakest assumption identified in the stress-test note.
Authors: The scalability claim rests on the analytical complexity reduction and constant message size, which are class-agnostic. The cyclist GNSS evaluation is presented as a representative vulnerable-road-user case. We agree that the absence of mixed-class and lossy-channel experiments limits applicability statements. We will revise the abstract and §6 to moderate the language, replace the broad claim with a statement grounded in the presented analysis, and add an explicit limitations paragraph discussing the assumptions and required future work on mixed traffic and channel losses. revision: partial
- New experiments involving mixed vehicle/pedestrian classes, occlusions, and lossy communication channels cannot be performed within the current revision scope without additional data collection.
Circularity Check
No circularity detected in derivation chain
full rationale
The paper's claims rest on complexity analysis of three encodings, simulation-based CPU measurements comparing uncertainty ellipses to trajectory vectors, and EKF-based predictions evaluated on external real-world GNSS cyclist trajectories from a controlled test track. No equations, fitted parameters, or self-citations are described that reduce any prediction or result to its own inputs by construction. The derivation chain is self-contained against external benchmarks and does not invoke self-citation load-bearing uniqueness theorems, ansatzes smuggled via citation, or renaming of known results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
V2X Intention Sharing for Cooperative Electrically Power- Assisted Cycles,
F. Valle, J. Elfing, J. Pålsson, E. Haller, and O. Amador, “V2X Intention Sharing for Cooperative Electrically Power- Assisted Cycles,” in F AST-zero’25 - Future Active Safety Technology toward zero traffic accidents. Arles, France: Laboratory of Accident Mechanisms Analysis of Gustave VOLUME , 9 Author Valle et al.: Scalable Intention Sharing for ETSI V A...
2025
-
[2]
Cellular-V2X for Vulner- able Road User Protection in Cooperative ITS,
A. Hegde, S. Lobo, and A. Festag, “Cellular-V2X for Vulner- able Road User Protection in Cooperative ITS,” in 2022 18th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), 2022, pp. 118– 123
2022
-
[3]
Hastie, R
T. Hastie, R. Tibshirani, and J. Friedman, The Elements of Statistical Learning: Data Mining, Inference, and Prediction. Springer, 2009
2009
-
[4]
Intelligent Transport System (ITS); Vulnerable Road Users (VRU) awareness; Part 2: Functional Architecture and Re- quirements definition; Release 2 ,
European Telecommunications Standards Institute (ETSI), “Intelligent Transport System (ITS); Vulnerable Road Users (VRU) awareness; Part 2: Functional Architecture and Re- quirements definition; Release 2 ,” ETSI, Standard TS 103 300-2 V2.1.1, May 2020
2020
-
[5]
Pedestrian intention recogni- tion using latent-dynamic conditional random fields,
D. Schulz and R. Stiefelhagen, “Pedestrian intention recogni- tion using latent-dynamic conditional random fields,” in IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015, pp. 622– 627
2015
-
[6]
A controlled interactive multiple model filter for com- bined pedestrian intention recognition and path prediction,
——, “A controlled interactive multiple model filter for com- bined pedestrian intention recognition and path prediction,” in IEEE Intelligent Transportation Systems (ITSC). IEEE, 2015, pp. 173–178
2015
-
[7]
Pedestrian intention and pose prediction using dynamical models and behavior classifi- cation,
R. Quintero and D. M. Gavrila, “Pedestrian intention and pose prediction using dynamical models and behavior classifi- cation,” in IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015, pp. 529–534
2015
-
[8]
Road topology aware pedestrian trajectory prediction via graph-based pooling,
E. Pool, J. F. Kooij, and D. M. Gavrila, “Road topology aware pedestrian trajectory prediction via graph-based pooling,” in IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017, pp. 431–436
2017
-
[9]
Lane-change intention prediction using machine learning,
A. Benterki et al., “Lane-change intention prediction using machine learning,” in IEEE IDAACS. IEEE, 2019, pp. 617– 622
2019
-
[10]
Towards cooperative vrus: Optimal positioning sampling for pedestrian awareness messages,
J. Martín-Pérez, O. Amador, M. Rydeberg, L. Olsson, and A. Vinel, “Towards cooperative vrus: Optimal positioning sampling for pedestrian awareness messages,” 2023. [Online]. A vailable:https://arxiv.org/abs/2312.14072
-
[11]
Adaptive message pri- oritization: How to prioritize vru awareness messages in a congested v2x network,
S. Lobo, A. Festag, and C. Facchi, “Adaptive message pri- oritization: How to prioritize vru awareness messages in a congested v2x network,” in 2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), 2024, pp. 423–430
2024
-
[12]
V2X intention sharing for e-bikes and e-scooters: Design and implementation of a vehicular network protocol for vulnerable road users intention sharing,
J. Elfing and J. Pålsson, “V2X intention sharing for e-bikes and e-scooters: Design and implementation of a vehicular network protocol for vulnerable road users intention sharing,” Master’s thesis, Halmstad University, School of Information Technology, Halmstad, Sweden, 2024. [Online]. A vailable: https://urn.kb.se/resolve?urn=urn:nbn:se:hh:diva-53613
2024
-
[13]
Intelligent Transport Systems (ITS); Vulnerable Road Users (VRU) awareness; Part 3: Specification of VRU aware- ness basic service; Release 2,
ETSI, “Intelligent Transport Systems (ITS); Vulnerable Road Users (VRU) awareness; Part 3: Specification of VRU aware- ness basic service; Release 2,” European Telecommunications Standards Institute (ETSI), Technical Specification (TS) 103- 300-3 v2.1.1, 11 2020
2020
-
[14]
Sensor fusion for predicting vehicles’ path for collision avoidance systems,
A. Polychronopoulos, M. Tsogas, A. J. Amditis, and L. An- dreone, “Sensor fusion for predicting vehicles’ path for collision avoidance systems,” IEEE Transactions on Intelligent Trans- portation Systems, vol. 8, no. 3, pp. 549–562, 2007
2007
-
[15]
Nesterov and A
Y. Nesterov and A. Nemirovskii, Interior-Point Polynomial Algorithms in Convex Programming, ser. SIAM Studies in Applied Mathematics. SIAM, 1994
1994
-
[16]
Artery: Extending Veins for V ANET Applications,
R. Riebl, H. Günther, C. Facchi, and L. Wolf, “Artery: Extending Veins for V ANET Applications,” in 2015 Interna- tional Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), 2015, pp. 450–456
2015
-
[17]
ITS; Vehicular Communications; Geographical Area Definition; Release 2,
ETSI, “ITS; Vehicular Communications; Geographical Area Definition; Release 2,” ETSI, Tech. Rep. TS 103 899 V2.1.1, 2025. Felipe Valle received the M.Sc. degree in electrical engineering from the University of Chile, in 2019. He is currently pursuing a Ph.D. degree with Halmstad University, Sweden. His research interests include coop- erative automated an...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.