Wind and State Estimation on SE(3): Comparative Evaluation of EKF and UKF with Continuous and Discrete Quadrotor Models
Pith reviewed 2026-07-01 01:38 UTC · model grok-4.3
The pith
Discrete SE(3) quadrotor dynamics paired with UKF yield higher wind-velocity estimation accuracy than continuous models or EKF.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
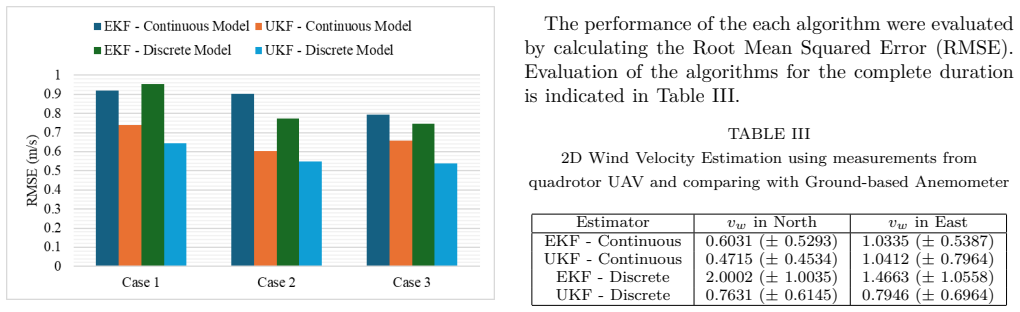
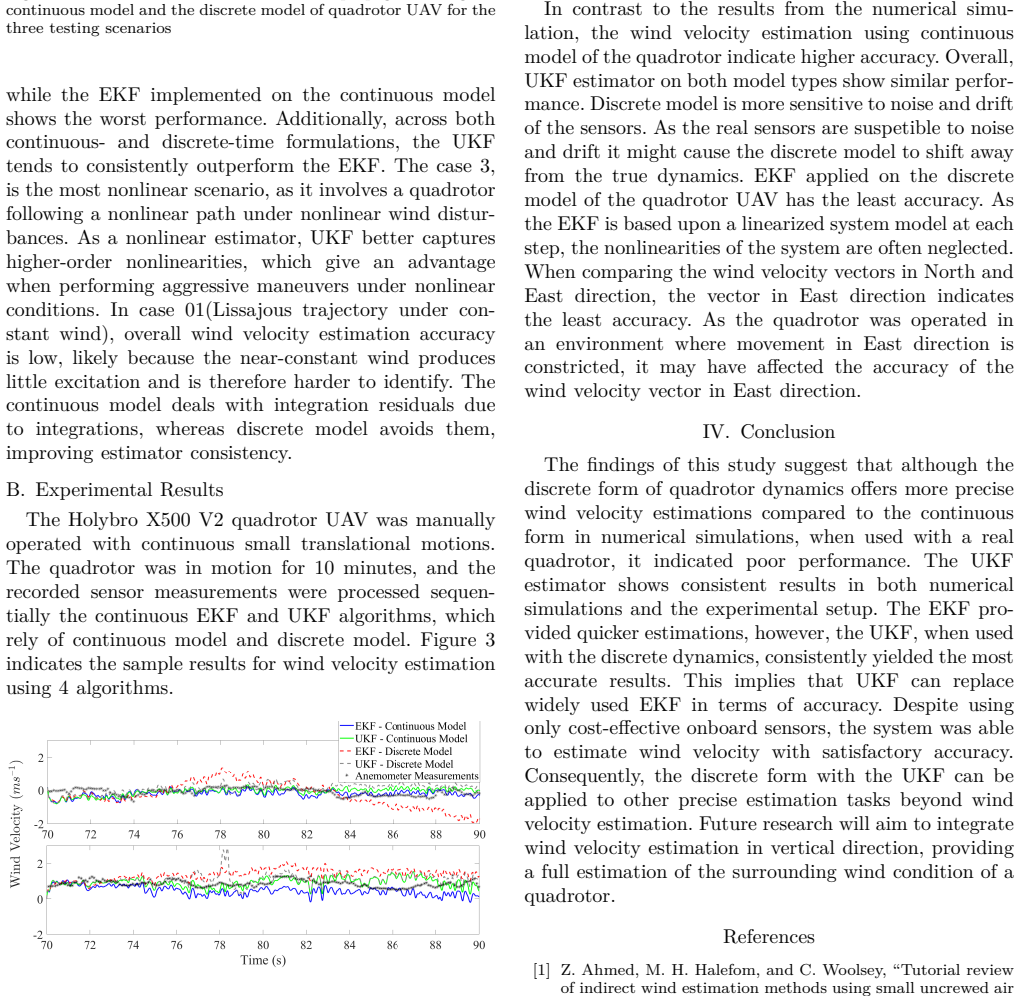
When the quadrotor dynamics are expressed exactly on SE(3) by a Lie-group variational integrator and the resulting discrete-time model is inserted into an unscented Kalman filter, the combined estimator recovers both vehicle state and wind velocity with measurably lower error than the same filter driven by the continuous dynamics or than an extended Kalman filter driven by either model, and this accuracy holds during both hovering and trajectory-tracking maneuvers even when sensor noise levels match those of inexpensive hardware.
What carries the argument
Lie Group Variational Integrator that supplies an exact discrete-time representation of the quadrotor equations of motion on SE(3) without linearization or discretization error.
If this is right
- The same discrete-UKF combination can be used for other disturbance estimation tasks that require geometric fidelity on SE(3).
- Low-cost sensor suites become sufficient for accurate wind-aware trajectory tracking once the discrete model is adopted.
- Filter tuning effort can be reduced because the unscented transform handles the nonlinear discrete map without Jacobian computation.
- Real-time implementation on embedded hardware is feasible because the variational integrator evaluates in closed form at each step.
Where Pith is reading between the lines
- The result suggests that geometric integrators may improve estimator performance in other rigid-body control problems where continuous-time approximations currently dominate.
- If the accuracy gain persists under wind gusts or payload changes, the discrete formulation could become the default model for online disturbance observers on SE(3).
- Extending the comparison to particle filters or moving-horizon estimators would test whether the benefit is specific to the unscented transform.
Load-bearing premise
The variational integrator gives a discrete dynamics whose integration error remains small enough that it does not increase filter estimation error relative to the continuous model.
What would settle it
An outdoor flight in which independent anemometer measurements of wind velocity are recorded simultaneously with the onboard estimator outputs; if the discrete-UKF errors exceed those of the continuous-EKF case by more than the reported margin, the claimed superiority is falsified.
Figures
read the original abstract
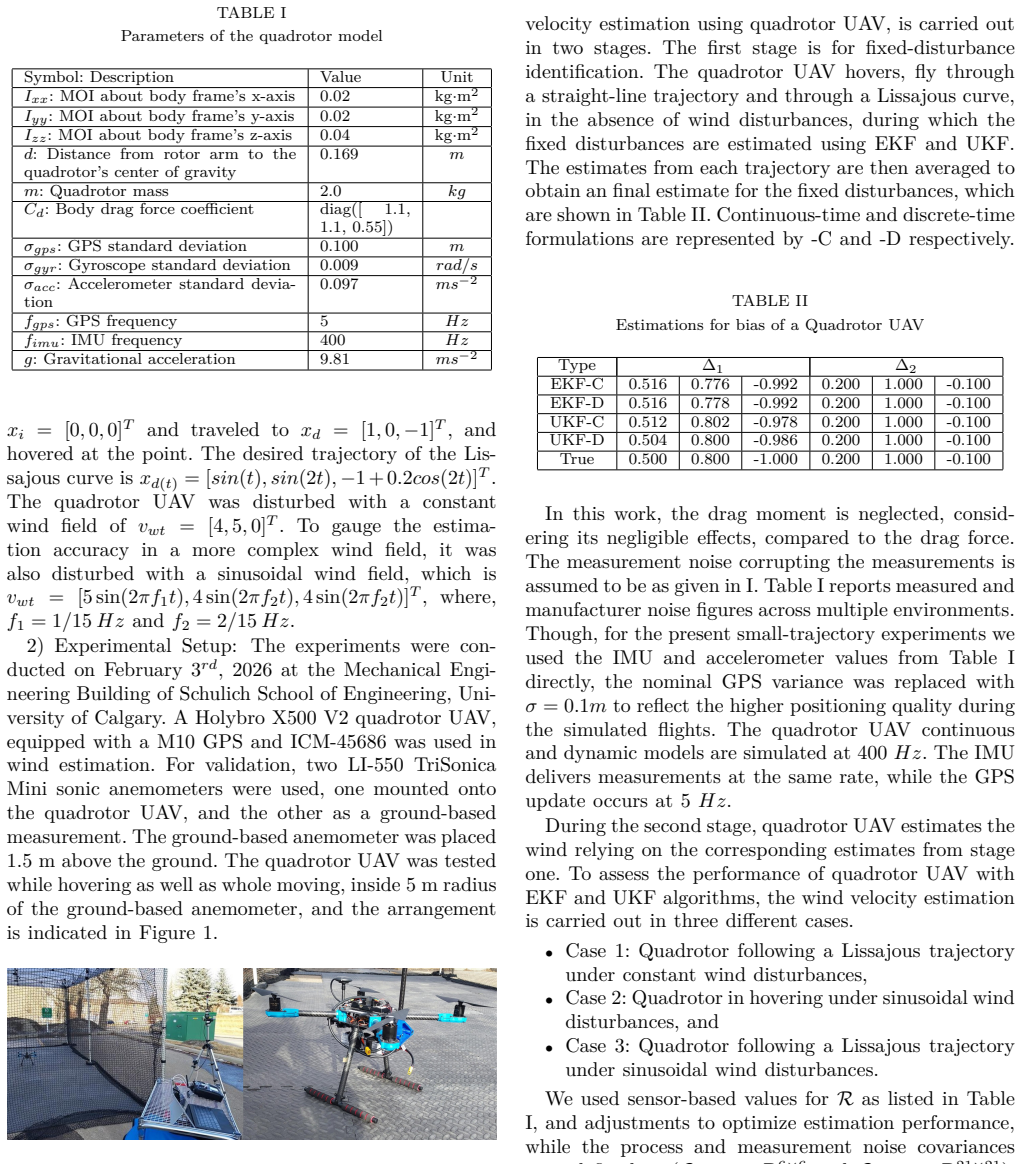
Use of quadrotor UAVs for wind velocity estimation is gaining popularity in recent studies, leveraging their maneuverability, compact size and low cost. Among available approaches, model-based wind velocity estimation is most commonly used, since it relies only on onboard sensors. However, as the quadrotor is a highly nonlinear system, thus making this task challenging. This study evaluate the use of both discrete and continuous dynamic equations of the quadrotor UAV for wind velocity estimation on SE(3), rather than commonly adapted continuous or discretized form. Lie Group Variational Integrator, developed on discrete Lagrangian is used as the discrete model without any approximation or discritization. The study assess both the discrete and continuous form of the quadrotor dynamics on SE(3) using Extended Kalman filter (EKF), and Unscented Kalman filter (UKF). The quadrotor UAV performance is evaluated in both MATLAB-based numerical simulations and free outdoor flight. The numerical simulations are conducted during both hovering and trajectory-tracking flights. Results demonstrate that, by using discrete SE(3) dynamics coupled with UKF, the quadrotor achieves higher estimation accuracy while maintaining trajectory tracking, even with low-cost sensors. These findings highlight the potential of discrete quadrotor models with UKF not only for wind velocity estimation but also for other high-accuracy tasks, even when relying on low-cost onboard sensors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper evaluates wind and state estimation for quadrotor UAVs on SE(3) by comparing EKF and UKF applied to both continuous dynamics and a discrete model obtained via Lie Group Variational Integrator (LGVI). It claims that the discrete SE(3) formulation paired with UKF yields superior estimation accuracy during hovering and trajectory tracking, even with low-cost sensors, as demonstrated in MATLAB simulations and outdoor flights, while preserving trajectory tracking performance.
Significance. If the accuracy advantage is robust to integrator choice and noise tuning, the work would indicate that structure-preserving discrete Lagrangian integrators can measurably improve filter performance on Lie groups for UAV wind estimation tasks, offering a practical route to higher accuracy without additional hardware.
major comments (2)
- [Methods / Continuous-model propagation] The manuscript does not specify the numerical integration scheme (Euler, RK4, etc.) or step-size/tolerance settings used to propagate the continuous SE(3) dynamics inside the EKF and UKF prediction steps. Because the central claim attributes performance gains to the discrete LGVI formulation rather than to integration accuracy, this omission directly affects whether the reported superiority of discrete+UKF survives a fair comparison; the stress-test concern therefore lands as a load-bearing issue.
- [Numerical results / Simulation setup] No quantitative comparison of integration error (e.g., local truncation error or conserved quantities) between the continuous integrator and the LGVI is provided. Without such metrics, it remains unclear whether the discrete model’s reported advantage is intrinsic to the SE(3) discretization or an artifact of differing numerical fidelity.
minor comments (2)
- [Abstract] The abstract states that the LGVI is used “without any approximation or discretization,” yet the continuous model necessarily requires discretization for implementation; a brief clarification of this terminology would avoid reader confusion.
- [Figures and tables] Figure captions and table headings should explicitly state the sensor noise levels and wind gust profiles used in each experiment so that reproducibility does not rely solely on the text.
Simulated Author's Rebuttal
We thank the referee for the constructive comments that highlight important aspects of methodological clarity. We address each major comment below and will incorporate the requested details in the revised manuscript.
read point-by-point responses
-
Referee: [Methods / Continuous-model propagation] The manuscript does not specify the numerical integration scheme (Euler, RK4, etc.) or step-size/tolerance settings used to propagate the continuous SE(3) dynamics inside the EKF and UKF prediction steps. Because the central claim attributes performance gains to the discrete LGVI formulation rather than to integration accuracy, this omission directly affects whether the reported superiority of discrete+UKF survives a fair comparison; the stress-test concern therefore lands as a load-bearing issue.
Authors: We agree that the integration scheme for the continuous model must be stated explicitly to support a fair comparison. In the revised manuscript we will add to the Methods section that the continuous SE(3) dynamics were propagated with the classical fourth-order Runge-Kutta (RK4) integrator using a fixed step size of 1 ms (identical to the discrete time step of the LGVI). This specification will allow readers to verify that the reported accuracy advantage of the discrete+UKF combination is not an artifact of unequal numerical integration fidelity. revision: yes
-
Referee: [Numerical results / Simulation setup] No quantitative comparison of integration error (e.g., local truncation error or conserved quantities) between the continuous integrator and the LGVI is provided. Without such metrics, it remains unclear whether the discrete model’s reported advantage is intrinsic to the SE(3) discretization or an artifact of differing numerical fidelity.
Authors: We accept that a direct quantitative comparison of integration accuracy is needed to strengthen the central claim. In the revision we will insert a new subsection (or supplementary table) that reports local truncation error norms and drift in conserved quantities (kinetic plus potential energy, angular momentum) for both the RK4 continuous integrator and the LGVI over the same simulation horizons and initial conditions used in the filter evaluations. These metrics will demonstrate that both integrators maintain comparable fidelity, thereby supporting the conclusion that the performance difference arises from the structure-preserving discrete formulation. revision: yes
Circularity Check
No circularity: comparative evaluation uses independent simulation and flight data
full rationale
The paper is a comparative study of EKF/UKF filters on continuous vs. discrete SE(3) quadrotor models (LGVI). Reported accuracy metrics come from separate MATLAB simulations (hovering and trajectory tracking) and outdoor flights; no parameters are fitted on a subset and then re-predicted as the performance metric. The LGVI is invoked as an existing structure-preserving integrator without the paper deriving its properties from the present results or via load-bearing self-citation. The central claim therefore rests on external data rather than reducing to its own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Tutorial review of indirect wind estimation methods using small uncrewed air vehicles,
Z. Ahmed, M. H. Halefom, and C. Woolsey, “Tutorial review of indirect wind estimation methods using small uncrewed air vehicles,” Journal of Aerospace Information Systems, vol. 21, pp. 667–683, 2024
2024
-
[2]
Measuring wind with small unmanned air- craft systems,
S. Prudden, A. Fisher, M. Marino, A. Mohamed, S. Watkins, and G. Wild, “Measuring wind with small unmanned air- craft systems,” Journal of Wind Engineering and Industrial Aerodynamics, vol. 176, pp. 197–210, 5 2018
2018
-
[3]
Real-time kinemat- ics GPS based telemetry system for airborne measurements of ship air wake,
K. Gamagedara, T. Lee, and M. Snyder, “Real-time kinemat- ics GPS based telemetry system for airborne measurements of ship air wake,” in AIAA Scitech 2019 Forum. AIAA, 2019
2019
-
[4]
Real-time wind esti- mation on a micro unmanned aerial vehicle using its inertial measurement unit,
P. P. Neumann and M. Bartholmai, “Real-time wind esti- mation on a micro unmanned aerial vehicle using its inertial measurement unit,” Sensors and Actuators, A: Physical, vol. 235, pp. 300–310, 11 2015
2015
-
[5]
Kalman filter-based wind estimation for forest fire monitoring with a quadrotor uav,
Z. Xing, Y. Zhang, C. Y. Su, Y. Qu, and Z. Yu, “Kalman filter-based wind estimation for forest fire monitoring with a quadrotor uav,” IEEE Conference on Control Technology and Applications, pp. 783–788, 2019
2019
-
[6]
Wind field estimation using multiple quadcopters,
H. Chen, H. Bai, and C. N. Taylor, “Wind field estimation using multiple quadcopters,” IF AC-PapersOnLine, vol. 56, pp. 61–66, 2023. [Online]. A vailable: https://doi.org/10.1016/j.ifacol.2023.12.001
-
[7]
Uav state and parameter estimation in wind using calibration trajectories optimized for observability,
A. Shastry and D. A. Paley, “Uav state and parameter estimation in wind using calibration trajectories optimized for observability,” IEEE Control Systems Letters, vol. 5, pp. 1801–1806, 11 2021
2021
-
[8]
Wind field estimation through autonomous quadcopter avionics,
X. Xiang, Z. Wang, Z. Mo, G. Chen, K. Pham, and E. Blasch, “Wind field estimation through autonomous quadcopter avionics,” AIAA/IEEE Digital A vionicsSystems Conference - Proceedings, vol. 2016-Dec, pp. 1–6, 2016
2016
-
[9]
Model-based wind profiling in the lower atmosphere with multirotor UAS,
J. Gonzalez-Rocha, C. A. Woolsey, C. Sultan, and S. F. D. Wekker, “Model-based wind profiling in the lower atmosphere with multirotor UAS,” in AIAA Scitech 2019 Forum. AIAA, 2019
2019
-
[10]
Iros 2016 : 2016 ieee/rsj international conference on intelligent robots and systems : October 9-14, 2016, daejeon convention center, daejeon, korea,
L. Sikkel, G. de Croon, C. D. Wagter, and Q. Chu, “Iros 2016 : 2016 ieee/rsj international conference on intelligent robots and systems : October 9-14, 2016, daejeon convention center, daejeon, korea,” in IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 10 2016, pp. 2141– 2146
2016
-
[11]
System identification for high-performance uav control in wind,
A. K. Shastry and D. A. Paley, “System identification for high-performance uav control in wind,” International Journal of Robust and Nonlinear Control, vol. 33, pp. 10 451–10 467, 11 2023
2023
-
[12]
Incorporating thrust models for quad- copter wind estimation,
H. Chen and H. Bai, “Incorporating thrust models for quad- copter wind estimation,” IF AC-PapersOnLine, vol. 55, no. 37, pp. 19–24, 2022
2022
-
[13]
Global formulation of an extended kalman filter on se(3) for geometric control of a quadrotor uav,
F. A. Goodarzi and T. Lee, “Global formulation of an extended kalman filter on se(3) for geometric control of a quadrotor uav,” Journal of Intelligent and Robotic Systems: Theory and Applications, vol. 88, pp. 395–413, 12 2017
2017
-
[14]
Lie group varia- tional integrators for the full body problem in orbital mechan- ics,
T. Lee, M. Leok, and N. H. McClamroch, “Lie group varia- tional integrators for the full body problem in orbital mechan- ics,” Celestial Mechanics and Dynamical Astronomy, vol. 98, no. 2, pp. 121–144, 2007
2007
-
[15]
Stochastic wind modeling and estimation for unmanned aircraft systems,
M. Rhudy, J. Gross, and Y. Gu, “Stochastic wind modeling and estimation for unmanned aircraft systems,” in AIAA A viation2019 Forum. AIAA, 2019, pp. 1–9
2019
-
[16]
J. L. Crassidis and J. L. Junkins, Optimal Estimation of Dynamics Systems, 2nd ed. Chapman and Hall/CRC, 2004
2004
-
[17]
S. S. Haykin, Kalman Filtering and Neural Networks. John Wiley & Sons, 2001
2001
-
[18]
ICM-45686,
TDK InvenSense, “ICM-45686,” https://invensense.tdk.com/products/, 2025, accessed: 2025-06-25
2025
-
[19]
M10 GPS,
Holybro Store, “M10 GPS,” https://holybro.com/products/m10- gps, 2025, accessed: 2025-06-25
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.