On the robust existence of piecewise quadratic Lyapunov functions for hybrid models of gene regulatory networks
Pith reviewed 2026-05-25 13:36 UTC · model grok-4.3
The pith
Conditions checked only at the vertices of a parameter polytope guarantee a common piecewise quadratic Lyapunov function for every realization of an uncertain piecewise affine gene regulatory network model, including cases with sliding mode
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For an uncertain piecewise affine hybrid model of a gene regulatory network with polytopic uncertainties in the protein production rates, a common piecewise quadratic Lyapunov function exists for every realization in the uncertainty set whenever the Lyapunov decrease conditions, including those across sliding-mode surfaces, are satisfied at the vertices of the parameter polytope.
What carries the argument
A piecewise quadratic Lyapunov function defined over the state-space partitions of the hybrid model, with decrease conditions enforced at polytope vertices and across sliding surfaces.
If this is right
- Stability of the entire uncertain family follows from vertex checks alone.
- The same piecewise quadratic function works across all realizations and sliding modes.
- No separate analysis is required for interior points of the uncertainty set.
- The approach applies directly to existing piecewise affine models of gene networks.
Where Pith is reading between the lines
- The vertex-reduction technique may apply to other classes of hybrid biological models whose uncertainties are also polytopic.
- The conditions could be turned into linear matrix inequalities that are solved once at the vertices to obtain the common Lyapunov function.
- If the vertex method scales well, it could support robust controller synthesis for gene networks whose parameters drift within known bounds.
Load-bearing premise
The uncertainties in the protein production rate functions form a polytope, and satisfaction of the Lyapunov decrease conditions at the vertices is enough to guarantee a common function for the whole set.
What would settle it
A concrete parameter value inside the polytope for which the Lyapunov decrease conditions fail at some point despite holding at all vertices, or a realization of the model that is unstable even though the vertex conditions are met.
Figures
read the original abstract
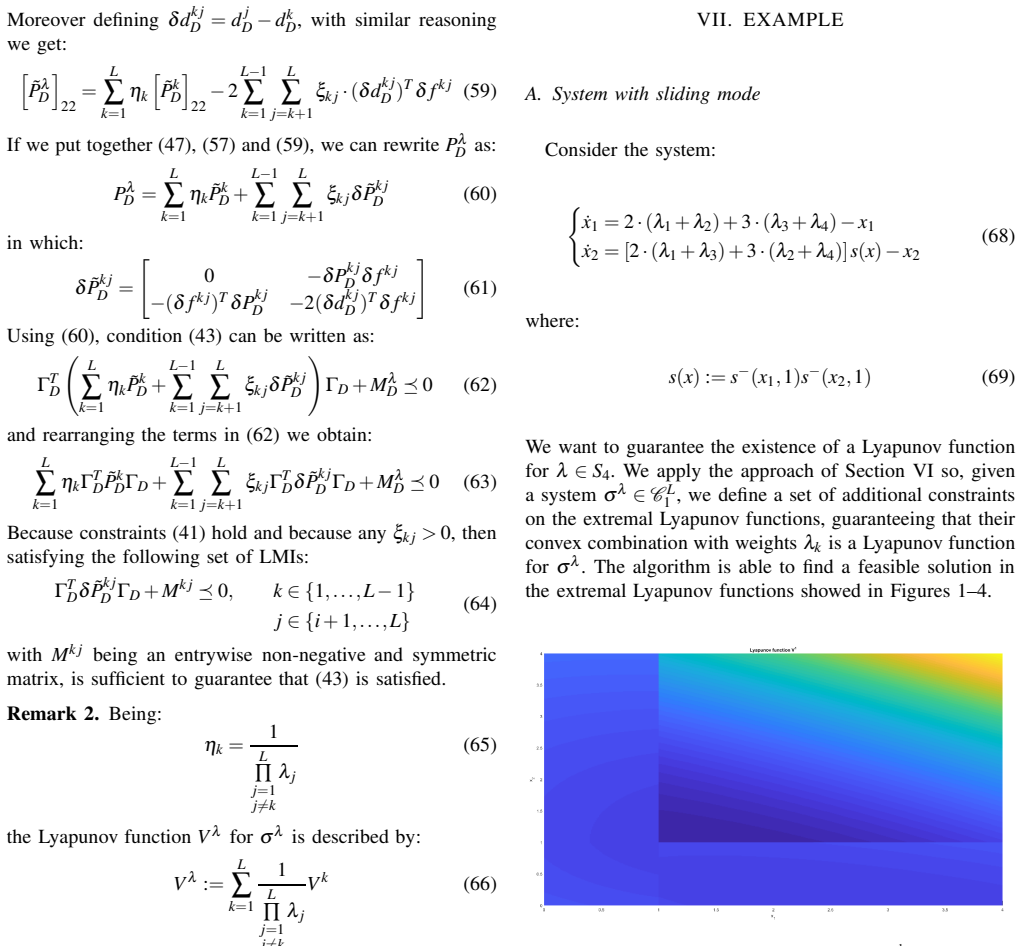
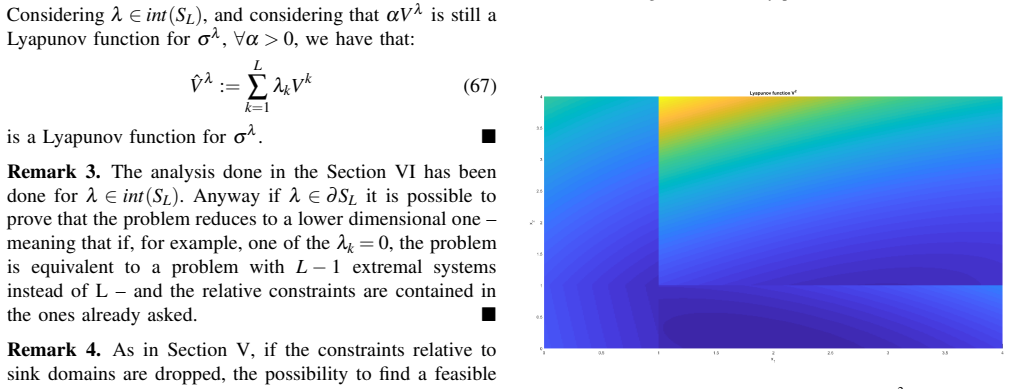
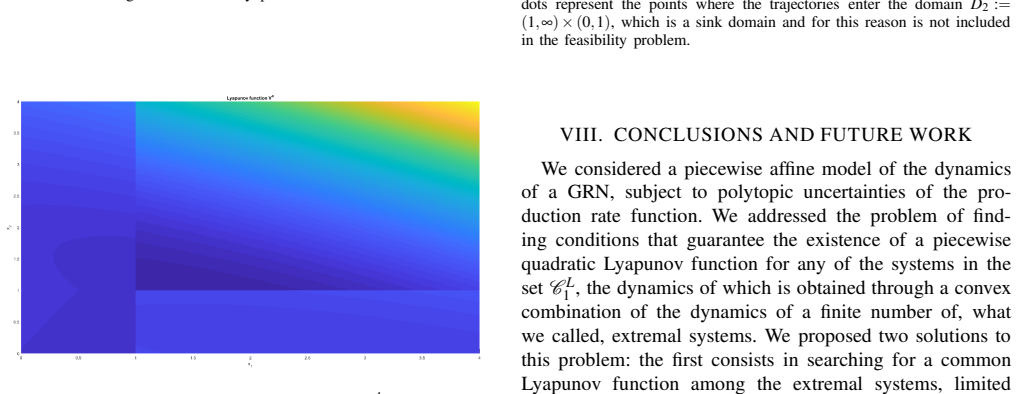
In this work we addressed the problem of stability analysis for an uncertain piecewise affine model of a genetic regulatory network. In particular we considered polytopic parameter uncertainties on the proteins production rate functions, giving conditions for the existence of a piecewise quadratic Lyapunov function for any possible realization of the system. In the spirit of other works in literature, the resulting conditions will be given on the vertices of the parameter polytope, while still taking into consideration the piecewise nature of the Lyapunov function and the presence, in general, of sliding modes solutions. An example is shown to prove the validity and applicability of the theoretical results.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript addresses stability analysis of uncertain piecewise-affine hybrid models of gene regulatory networks subject to polytopic uncertainties on the protein production rate functions. It derives conditions, formulated exclusively on the vertices of the parameter polytope, that guarantee the existence of a common piecewise-quadratic Lyapunov function for every realization in the uncertainty set while explicitly accounting for the piecewise structure of the Lyapunov function and the possible presence of sliding-mode solutions. An illustrative example is provided to demonstrate applicability.
Significance. If the vertex-wise conditions are shown to be sufficient, the result supplies a computationally attractive certificate for robust stability of a practically relevant class of uncertain hybrid systems; the approach correctly exploits the polytopic structure of the vector fields per mode and the fact that sliding dynamics lie in the convex hull of adjacent fields, so that affine Lyapunov decrease conditions attain their extrema at vertices.
minor comments (2)
- [Abstract] Abstract, last sentence: the phrasing 'An example is shown to prove the validity' is imprecise; a single numerical example can only illustrate or validate applicability, not prove a general theorem. Consider rephrasing to 'An example is provided to illustrate the applicability of the theoretical results.'
- [Section on sliding modes (likely §3 or §4)] The manuscript should explicitly state whether the sliding-mode vector field is taken as any convex combination (Filippov) or a specific selection; the convexity argument in the skeptic note relies on the former, but the precise definition used in the derivations should be clarified in the main text.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript, the accurate summary of its contributions, and the recommendation for minor revision. The significance statement correctly identifies the key technical features of the result.
Circularity Check
No significant circularity; derivation relies on convexity
full rationale
The paper establishes vertex-wise conditions for a common PWQ Lyapunov function across a polytopic uncertainty set by noting that vector fields are polytopic per mode, sliding dynamics lie in the convex hull, and Lyapunov decrease is affine in the vector field; hence extrema occur at vertices and vertex satisfaction implies the property everywhere. This is a direct application of convex analysis with no reduction of the central claim to a fitted quantity, self-definition, or load-bearing self-citation chain. The approach is self-contained against external benchmarks of polytopic robust stability.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math A piecewise quadratic function that is positive definite and whose derivative is negative definite along all trajectories (including sliding modes) certifies asymptotic stability of the hybrid system.
- domain assumption For polytopic uncertainties it is sufficient to verify the Lyapunov conditions only at the vertices of the uncertainty polytope.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
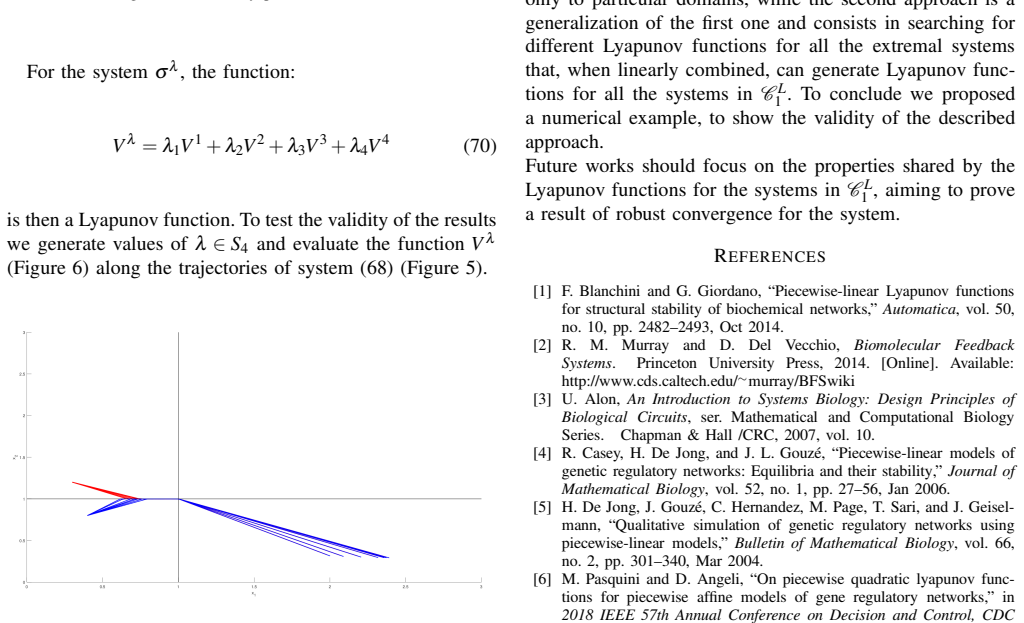
We give conditions for the existence of a piecewise quadratic Lyapunov function for any possible realization of the system. The resulting conditions will be given on the vertices of the parameter polytope, while still taking into consideration the piecewise nature of the Lyapunov function and the presence, in general, of sliding modes solutions.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
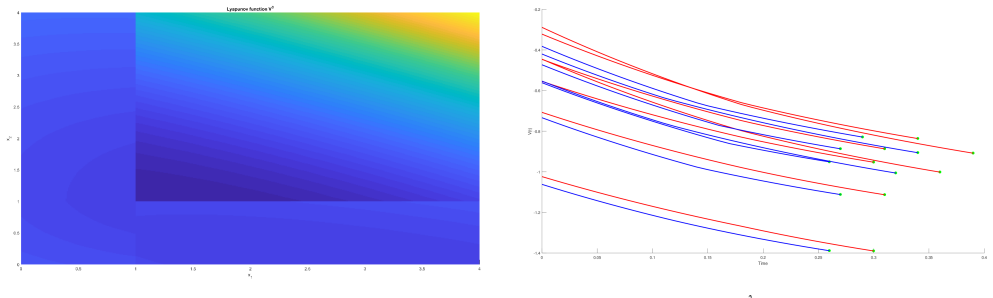
the dynamics inside sink domains is well characterized [4], with the property that any trajectory entering a sink domain will not leave it.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Piecewise-linear Lyapun ov functions for structural stability of biochemical networks,
F. Blanchini and G. Giordano, “Piecewise-linear Lyapun ov functions for structural stability of biochemical networks,” Automatica, vol. 50, no. 10, pp. 2482–2493, Oct 2014
work page 2014
-
[2]
R. M. Murray and D. Del V ecchio, Biomolecular Feedback Systems. Princeton University Press, 2014. [Online]. Available: http://www.cds.caltech.edu/∼ murray/BFSwiki
work page 2014
-
[3]
Alon, An Introduction to Systems Biology: Design Principles of Biological Circuits , ser
U. Alon, An Introduction to Systems Biology: Design Principles of Biological Circuits , ser. Mathematical and Computational Biology Series. Chapman & Hall /CRC, 2007, vol. 10
work page 2007
-
[4]
Piecewise-linear models of genetic regulatory networks: Equilibria and their stabili ty,
R. Casey, H. De Jong, and J. L. Gouz´ e, “Piecewise-linear models of genetic regulatory networks: Equilibria and their stabili ty,” Journal of Mathematical Biology , vol. 52, no. 1, pp. 27–56, Jan 2006
work page 2006
-
[5]
Qualitative simulation of genetic regulatory netwo rks using piecewise-linear models,
H. De Jong, J. Gouz´ e, C. Hernandez, M. Page, T. Sari, and J . Geisel- mann, “Qualitative simulation of genetic regulatory netwo rks using piecewise-linear models,” Bulletin of Mathematical Biology , vol. 66, no. 2, pp. 301–340, Mar 2004
work page 2004
-
[6]
M. Pasquini and D. Angeli, “On piecewise quadratic lyapu nov func- tions for piecewise affine models of gene regulatory network s,” in 2018 IEEE 57th Annual Conference on Decision and Control, CD C 2018, Miami Beach, FL, USA, Dec 2018, pp. 1071–1076
work page 2018
-
[7]
Lyapunov stabi lity for piecewise affine systems via cone-copositivity,
R. Iervolino, D. Tangredi, and F. V asca, “Lyapunov stabi lity for piecewise affine systems via cone-copositivity,” Automatica, vol. 81, pp. 22–29, Jul 2017
work page 2017
-
[8]
Computation of Piecewise Q uadratic Lyapunov Functions for Hybrid Systems,
M. Johansson and A. Rantzer, “Computation of Piecewise Q uadratic Lyapunov Functions for Hybrid Systems,” IEEE Transactions on Automatic Control, vol. 43, no. 4, Apr 1998
work page 1998
-
[9]
An LMI condition for the robust stability of uncertain continuous-time linear syst ems,
D. C. W. Ramos and P . L. D. Peres, “An LMI condition for the robust stability of uncertain continuous-time linear syst ems,” IEEE Transactions on Automatic Control , vol. 47, no. 4, pp. 675–678, Apr 2002
work page 2002
-
[10]
G. Chesi, A. Garulli, A. Tesi, and A. Vicino, “Polynomia lly parameter- dependent Lyapunov functions for robust stability of polyt opic sys- tems: An LMI approach,” IEEE Transactions on Automatic Control , vol. 50, no. 3, pp. 365–370, Mar 2005
work page 2005
-
[11]
R. C. L. F. Oliveira and P . L. D. Peres, “LMI conditions fo r robust sta- bility analysis based on polynomially parameter-dependen t Lyapunov functions,” Systems and Control Letters , vol. 55, no. 1, pp. 52–61, Jan 2006
work page 2006
-
[12]
On canonical repres entations of convex polyhedra,
D. Avis, K. Fukuda, and S. Picozzi, “On canonical repres entations of convex polyhedra,” in Proceedings of the First International Congress of Mathematical Software , 2002, pp. 350–360
work page 2002
-
[13]
Multi- Parametric Toolbox 3.0,
M. Herceg, M. Kvasnica, C. Jones, and M. Morari, “Multi- Parametric Toolbox 3.0,” in Proc. of the European Control Conference , Z ¨ urich, Switzerland, July 2013, pp. 502–510
work page 2013
-
[14]
Filippov, Differential Equations with Discontinuous Righthand Sides, F
A. Filippov, Differential Equations with Discontinuous Righthand Sides, F. Arscott, Ed. Kluwer Academic Publishers, 1988
work page 1988
-
[15]
Ge netic Net- work Analyzer: qualitative simulation of genetic regulato ry networks,
H. De Jong, J. Geiselmann, C. Hernandez, and M. Page, “Ge netic Net- work Analyzer: qualitative simulation of genetic regulato ry networks,” Bioinformatics, vol. 19, no. 3, pp. 336–344, Feb 2003
work page 2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.