DeepOrganNet: On-the-Fly Reconstruction and Visualization of 3D / 4D Lung Models from Single-View Projections by Deep Deformation Network
Pith reviewed 2026-05-24 17:38 UTC · model grok-4.3
The pith
DeepOrganNet reconstructs high-fidelity 3D and 4D lung models from single 2D projections by learning deformation fields from multiple templates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DeepOrganNet reconstructs 3D and 4D lung models from single-view 2D projections by learning smooth deformation fields from multiple templates based on a trivariate tensor-product deformation technique that is controlled by an informative latent descriptor extracted from the input image. The framework produces high-quality manifold meshes in several milliseconds and supports both synthetic phantom and real patient data.
What carries the argument
Trivariate tensor-product deformation technique that warps multiple template lung models according to a latent descriptor extracted from the single 2D input image by the deep network.
If this is right
- Mesh generation completes in milliseconds rather than the minutes or hours required by multi-projection methods.
- Only one projection is needed instead of hundreds, lowering cumulative radiation dose to the patient.
- Real-time 3D and 4D visualization during procedures such as image-guided radiation therapy becomes feasible.
- Consistent high-fidelity manifold meshes are produced for both synthetic and real lung shapes with around 10K vertices.
Where Pith is reading between the lines
- The same template-deformation approach could be tested on other soft organs if corresponding template libraries are assembled.
- Four-dimensional output might support continuous tracking of respiratory motion without repeated full-volume scans.
- Workflow changes in clinics would still require direct comparison of single-view results against multi-view ground truth on large patient cohorts.
Load-bearing premise
The latent descriptor taken from one 2D projection contains enough information to choose and apply the right deformation fields that match actual patient lung geometry across the range of shapes seen in practice.
What would settle it
Reconstruct a lung model from one projection of a patient scan, then measure the surface distance between that model and the ground-truth surface obtained from the full multi-projection CT of the same patient; if average error exceeds typical clinical tolerance for lung contouring, the claim fails.
Figures










read the original abstract
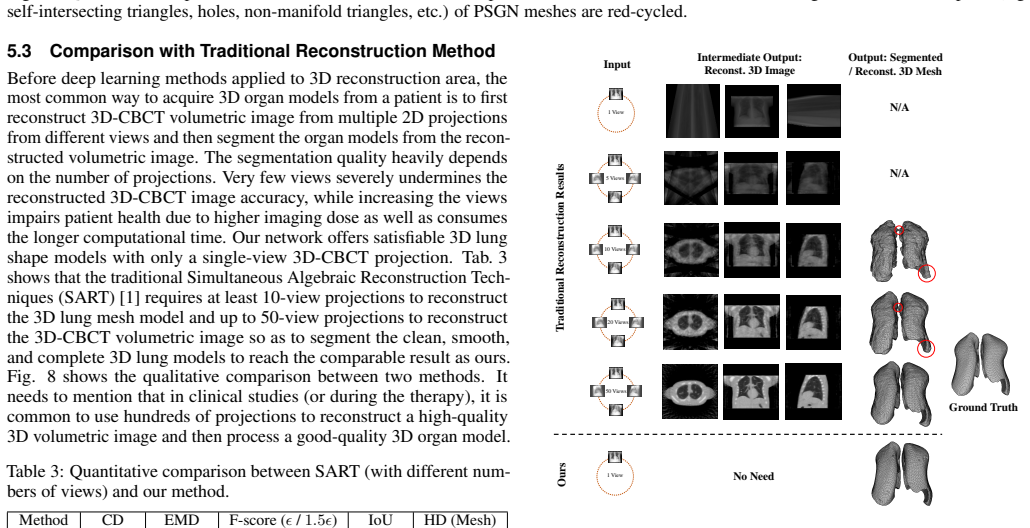
This paper introduces a deep neural network based method, i.e., DeepOrganNet, to generate and visualize high-fidelity 3D / 4D organ geometric models from single-view medical image in real time. Traditional 3D / 4D medical image reconstruction requires near hundreds of projections, which cost insufferable computational time and deliver undesirable high imaging / radiation dose to human subjects. Moreover, it always needs further notorious processes to extract the accurate 3D organ models subsequently. To our knowledge, there is no method directly and explicitly reconstructing multiple 3D organ meshes from a single 2D medical grayscale image on the fly. Given single-view 2D medical images, e.g., 3D / 4D-CT projections or X-ray images, our end-to-end DeepOrganNet framework can efficiently and effectively reconstruct 3D / 4D lung models with a variety of geometric shapes by learning the smooth deformation fields from multiple templates based on a trivariate tensor-product deformation technique, leveraging an informative latent descriptor extracted from input 2D images. The proposed method can guarantee to generate high-quality and high-fidelity manifold meshes for 3D / 4D lung models. The major contributions of this work are to accurately reconstruct the 3D organ shapes from 2D single-view projection, significantly improve the procedure time to allow on-the-fly visualization, and dramatically reduce the imaging dose for human subjects. Experimental results are evaluated and compared with the traditional reconstruction method and the state-of-the-art in deep learning, by using extensive 3D and 4D examples from synthetic phantom and real patient datasets. The proposed method only needs several milliseconds to generate organ meshes with 10K vertices, which has a great potential to be used in real-time image guided radiation therapy (IGRT).
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DeepOrganNet, an end-to-end deep neural network that reconstructs 3D/4D lung models from single-view 2D projections (X-ray or CT) by extracting a latent descriptor to drive smooth deformation fields from multiple templates via trivariate tensor-product B-splines, claiming real-time generation of high-fidelity manifold meshes with 10K vertices in milliseconds while reducing radiation dose compared to traditional multi-projection methods.
Significance. If the central claim holds, the work would enable on-the-fly 3D/4D organ visualization in image-guided radiation therapy with dramatically lower patient dose. The template-based trivariate deformation combined with learned 2D-to-3D mapping is a technically interesting approach to single-view reconstruction; the real-time performance claim and explicit manifold-mesh guarantee are concrete strengths if quantitatively supported.
major comments (2)
- [Framework] Framework section (description of latent descriptor and deformation): the central claim that a latent descriptor extracted from a single 2D projection suffices to select and parameterize the correct deformation fields from multiple templates is load-bearing, yet the manuscript provides no explicit test or analysis of projection ambiguity (distinct 3D lung configurations yielding near-identical 2D projections). Without such validation on real-patient variations or held-out breathing phases, the high-fidelity claim on real datasets rests on an untested sufficiency assumption.
- [Experimental results] Experimental results section: while the abstract states that results are evaluated on synthetic phantom and real patient datasets and compared to traditional reconstruction and SOTA deep learning methods, the provided text contains no quantitative metrics (e.g., surface error, Dice, Hausdorff distance), error bars, ablation studies on template count or latent dimension, or details on training/validation splits. This absence prevents assessment of whether the learned mapping generalizes beyond the training templates.
minor comments (2)
- [Abstract] The abstract claims 'high-quality and high-fidelity manifold meshes' without defining the criteria or reporting any mesh-quality metric; add a short definition or reference in the contributions paragraph.
- [Methods] Notation for the trivariate tensor-product deformation (B-spline basis, control-point grid) should be introduced with an equation in the methods section for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and indicate the revisions we will incorporate.
read point-by-point responses
-
Referee: [Framework] Framework section (description of latent descriptor and deformation): the central claim that a latent descriptor extracted from a single 2D projection suffices to select and parameterize the correct deformation fields from multiple templates is load-bearing, yet the manuscript provides no explicit test or analysis of projection ambiguity (distinct 3D lung configurations yielding near-identical 2D projections). Without such validation on real-patient variations or held-out breathing phases, the high-fidelity claim on real datasets rests on an untested sufficiency assumption.
Authors: We agree that an explicit analysis of projection ambiguity would strengthen the presentation of the latent descriptor's sufficiency. The current approach trains on diverse real-patient variations across breathing phases, and generalization is supported by performance on held-out data. In revision we will add a discussion subsection addressing potential ambiguities and how the multi-template trivariate deformation mitigates them; if space permits we will include a small additional experiment on synthetic ambiguous pairs. revision: partial
-
Referee: [Experimental results] Experimental results section: while the abstract states that results are evaluated on synthetic phantom and real patient datasets and compared to traditional reconstruction and SOTA deep learning methods, the provided text contains no quantitative metrics (e.g., surface error, Dice, Hausdorff distance), error bars, ablation studies on template count or latent dimension, or details on training/validation splits. This absence prevents assessment of whether the learned mapping generalizes beyond the training templates.
Authors: We acknowledge that the reviewed version did not present the quantitative metrics, ablations, and split details with sufficient clarity. The manuscript does contain evaluations on synthetic and real datasets with comparisons, but we will expand the experimental section in the revision to include explicit surface error, Dice, Hausdorff distances with error bars, ablation studies on template count and latent dimension, and full training/validation split information. revision: yes
Circularity Check
No circularity: standard end-to-end supervised deformation learning with held-out evaluation
full rationale
The paper presents a neural network that extracts a latent descriptor from a single 2D projection and regresses parameters for trivariate tensor-product B-spline deformation fields applied to template meshes. Training uses paired 2D/3D data from synthetic phantoms and patient scans; evaluation compares reconstructed meshes against ground-truth on separate examples. No equation or claim reduces the output geometry to the input by algebraic identity, no fitted parameter is relabeled as an independent prediction, and no load-bearing premise rests on a self-citation chain. The derivation is a conventional learned mapping whose fidelity is assessed externally against reference 3D models.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights
axioms (2)
- domain assumption A latent descriptor extracted from a single 2D projection is sufficient to determine the correct deformation fields from multiple templates for accurate 3D lung reconstruction.
- domain assumption Trivariate tensor-product deformation produces manifold meshes that remain topologically valid for lung surfaces.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
our end-to-end DeepOrganNet framework can efficiently and effectively reconstruct 3D / 4D lung models ... by learning the smooth deformation fields from multiple templates based on a trivariate tensor-product deformation technique
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
FFD ... trivariate tensor-product spline function ... Bernstein polynomial
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A. Andersen and A. Kak. Simultaneous algebraic reconstruction technique (SART): a superior implementation of the ART algorithm. Ultrasonic Imaging, 6(1):81–94, 1984
work page 1984
-
[2]
F. Bernardini, J. Mittleman, H. Rushmeier, C. Silva, and G. Taubin. The ball-pivoting algorithm for surface reconstruction. IEEE Transactions on Visualization and Computer Graphics, 5(4):349–359, 1999
work page 1999
- [3]
- [4]
-
[5]
J. Carreira, S. Vicente, L. Agapito, and J. Batista. Lifting object detection datasets into 3D. IEEE Transactions on Pattern Analysis and Machine Intelligence, 38(7):1342–1355, 2016
work page 2016
-
[6]
R. Castillo, E. Castillo, R. Guerra, V . Johnson, T. McPhail, A. Garg, and T. Guerrero. A framework for evaluation of deformable image registration spatial accuracy using large landmark point sets. Physics in Medicine & Biology, 54:1849–1870, 2009
work page 2009
-
[7]
ShapeNet: An Information-Rich 3D Model Repository
A. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, et al. ShapeNet: an information- rich 3D model repository. arXiv preprint arXiv:1512.03012, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[8]
G.-H. Chen, J. Tang, and S. Leng. Prior image constrained compressed sensing (PICCS): a method to accurately reconstruct dynamic CT im- ages from highly undersampled projection data sets. Medical Physics, 35(2):660–663, 2008
work page 2008
-
[9]
C. Choy, D. Xu, J. Gwak, K. Chen, and S. Savarese. 3D-R2N2: A unified approach for single and multi-view 3D object reconstruction. In Proceedings of the European Conference on Computer Vision, pp. 628– 644, 2016
work page 2016
-
[10]
P. Cignoni, C. Rocchini, and R. Scopigno. Metro: measuring error on simplified surfaces. In Computer Graphics Forum, vol. 17, pp. 167–174, 1998
work page 1998
-
[11]
J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and F.-F. Li. ImageNet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 248–255, 2009
work page 2009
- [12]
- [13]
-
[14]
H. Fan, H. Su, and L. Guibas. A point set generation network for 3D object reconstruction from a single image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 605–613, 2017
work page 2017
-
[15]
Q. Fang and D. Boas. Tetrahedral mesh generation from volumetric binary and grayscale images. In 2009 IEEE International Symposium on Biomedical Imaging: From Nano to Macro, pp. 1142–1145, 2009
work page 2009
-
[16]
L. Feldkamp, L. Davis, and J. Kress. Practical cone-beam algorithm. Journal of the Optical Society of America A-Optics Image Science and Vision, 1(6):612–619, 1984
work page 1984
-
[17]
M. Fleute and S. Lavall ´ee. Nonrigid 3-D / 2-D registration of images using statistical models. In Proceedings of International Conference on Medical Image Computing and Computer-Assisted Intervention , pp. 138–147, 1999
work page 1999
- [18]
-
[19]
P. Henzler, V . Rasche, T. Ropinski, and T. Ritschel. Single-image tomogra- phy: 3D volumes from 2D cranial X-rays. In Computer Graphics Forum, vol. 37, pp. 377–388, 2018
work page 2018
- [20]
-
[21]
MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
A. Howard, M. Zhu, B. Chen, D. Kalenichenko, W. Wang, T. Weyand, M. Andreetto, and H. Adam. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv preprint arXiv:1704.04861, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
- [22]
- [23]
-
[24]
D. Jack, J. K. Pontes, S. Sridharan, C. Fookes, S. Shirazi, F. Maire, and A. Eriksson. Learning free-form deformations for 3D object reconstruction. In Proceedings of the Asian Conference on Computer Vision, 2018
work page 2018
-
[25]
M. Kan, L. Leung, W. Wong, and N. Lam. Radiation dose from cone beam computed tomography for image-guided radiation therapy. International Journal of Radiation Oncology* Biology* Physics, 70(1):272–279, 2008
work page 2008
-
[26]
A. Kar, S. Tulsiani, J. Carreira, and J. Malik. Category-specific object reconstruction from a single image. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1966–1974, 2015
work page 1966
-
[27]
M. Kass, A. Witkin, and D. Terzopoulos. Snakes: Active contour models. International Journal of Computer Vision, 1(4):321–331, 1988
work page 1988
-
[28]
A. Kurenkov, J. Ji, A. Garg, V . Mehta, J. Gwak, C. Choy, and S. Savarese. DeformNet: free-form deformation network for 3D shape reconstruction from a single image. In IEEE Winter Conference on Applications of Computer Vision, pp. 858–866, 2018
work page 2018
-
[29]
P. La Riviere and D. Billmire. Reduction of noise-induced streak artifacts in X-ray computed tomography through spline-based penalized-likelihood sinogram smoothing. IEEE Transactions on Medical Imaging, 24(1):105– 111, 2005
work page 2005
-
[30]
H. Lamecker, T. Wenckebach, and H.-C. Hege. Atlas-based 3D-shape reconstruction from X-ray images. In Proceedings of IEEE International Conference on Pattern Recognition, vol. 1, pp. 371–374, 2006
work page 2006
-
[31]
R. Li, X. Jia, J. Lewis, X. Gu, M. Folkerts, C. Men, and S. Jiang. Real- time volumetric image reconstruction and 3D tumor localization based on a single x-ray projection image for lung cancer radiotherapy. Medical Physics, 37(6 Part 1):2822–2826, 2010
work page 2010
-
[32]
R. Li, X. Jia, J. Lewis, X. Gu, M. Folkerts, C. Men, and S. Jiang. Single- projection based volumetric image reconstruction and 3D tumor localiza- tion in real time for lung cancer radiotherapy. In International Conference on Medical Image Computing and Computer-Assisted Intervention , pp. 449–456, 2010
work page 2010
-
[33]
X. Liu, H. Wang, M. Xu, S. Nie, and H. Lu. A wavelet-based single-view reconstruction approach for cone beam x-ray luminescence tomography imaging. Biomedical Optics Express, 5(11):3848–3858, 2014
work page 2014
-
[34]
W. Lorensen and H. Cline. Marching cubes: A high resolution 3D surface construction algorithm. In ACM SIGGRAPH Computer Graphics, vol. 21, pp. 163–169, 1987
work page 1987
- [35]
-
[36]
L. Ren, J. Zhang, D. Thongphiew, D. Godfrey, Q. Wu, S.-M. Zhou, and F.-F. Yin. A novel digital tomosynthesis (DTS) reconstruction method using a deformation field map. Medical Physics, 35(7Part1):3110–3115, 2008
work page 2008
- [37]
-
[38]
O. Sadowsky, J. Cohen, and R. Taylor. Projected tetrahedra revisited: A barycentric formulation applied to digital radiograph reconstruction using higher-order attenuation functions. IEEE Transactions on Visualization and Computer Graphics, 12(4):461–473, 2006
work page 2006
- [39]
-
[40]
T. Sederberg and S. Parry. Free-form deformation of solid geometric models. ACM SIGGRAPH Computer Graphics, 20(4):151–160, 1986
work page 1986
-
[41]
W. Segars. Development and application of the new dynamic NURBS- based Cardiac-Torso (NCAT) phantom. Ph.D. dissertation, University of North Carolina, 2001
work page 2001
-
[42]
J. Shiraishi, S. Katsuragawa, J. Ikezoe, T. Matsumoto, T. Kobayashi, K. Komatsu, M. Matsui, H. Fujita, Y . Kodera, and K. Doi. Development of a digital image database for chest radiographs with and without a lung nodule: receiver operating characteristic analysis of radiologists’ detection of pulmonary nodules. American Journal of Roentgenology, 174(1):71...
work page 2000
-
[43]
R. Siddon. Fast calculation of the exact radiological path for a three- dimensional CT array. Medical Physics, 12(2):252–255, 1985
work page 1985
-
[44]
GEOMetrics: Exploiting Geometric Structure for Graph-Encoded Objects
E. Smith, S. Fujimoto, A. Romero, and D. Meger. GEOMetrics: Ex- ploiting geometric structure for graph-encoded objects. arXiv preprint arXiv:1901.11461, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1901
-
[45]
J. Song, Q. Liu, G. Johnson, and C. Badea. Sparseness prior based iterative image reconstruction for retrospectively gated cardiac micro-CT. Medical Physics, 34(11):4476–4483, 2007
work page 2007
-
[46]
W. Song, S. Kamath, S. Ozawa, S. Alani, A. Chvetsov, N. Bhandare, J. Palta, C. Liu, and J. Li. A dose comparison study between XVI and OBI CBCT systems. Medical Physics, 35(2):480–486, 2008
work page 2008
-
[47]
C. Szegedy, V . Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 2818–2826, 2016
work page 2016
-
[48]
T. Tang and R. Ellis. 2D/3D deformable registration using a hybrid atlas. In Proceedings of International Conference on Medical Image Computing and Computer-Assisted Intervention, pp. 223–230, 2005
work page 2005
-
[49]
J. Wang, T. Li, H. Lu, and Z. Liang. Penalized weighted least-squares ap- proach to sinogram noise reduction and image reconstruction for low-dose X-ray computed tomography. IEEE Transactions on Medical Imaging, 25(10):1272–1283, 2006
work page 2006
-
[50]
N. Wang, Y . Zhang, Z. Li, Y . Fu, W. Liu, and Y .-G. Jiang. Pixel2Mesh: Generating 3D mesh models from single rgb images. In Proceedings of the European Conference on Computer Vision, pp. 52–67, 2018
work page 2018
-
[51]
Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang, and J. Xiao. 3D ShapeNets: A deep representation for volumetric shapes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1912–1920, 2015
work page 1912
- [52]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.