Christoffel equation in the polarization variables
Pith reviewed 2026-05-24 19:52 UTC · model grok-4.3
The pith
Reformulating the Christoffel equation in polarization variables shows one to four slowness vectors per given unit polarization, except when it degenerates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
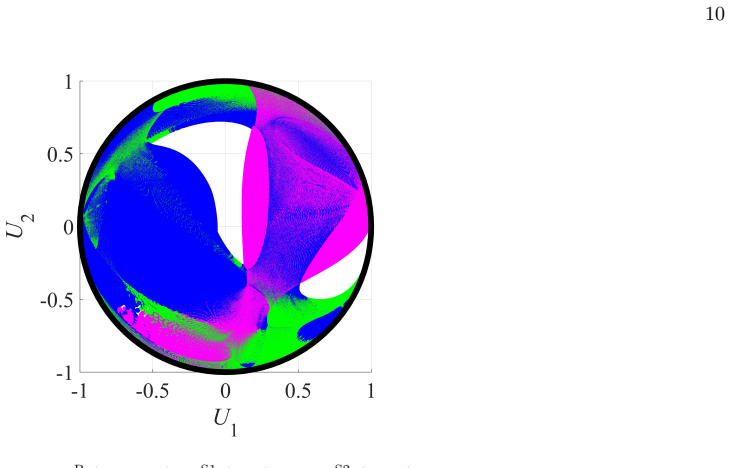
Expressing the Christoffel equation in polarization variables produces between one and four legitimate slowness vectors for any prescribed unit polarization vector, except in degenerate cases that allow infinitely many solutions; a subset of triclinic solids further admits finite-size solid angles of polarization directions unattainable by any plane wave.
What carries the argument
The Christoffel equation rewritten with polarization vector as the independent variable, from which slowness vectors are obtained by solving the resulting algebraic system.
If this is right
- Each admissible polarization direction supports at most four propagating plane waves.
- In non-degenerate cases the number of plane waves is always at least one and at most four.
- Triclinic anisotropy can exclude entire solid angles of polarization directions from plane-wave propagation.
- The algebraic structure of the equation directly limits the possible polarization-slowness pairs without reference to wave direction.
Where Pith is reading between the lines
- Seismic modeling codes could pre-filter impossible polarization states before solving boundary-value problems.
- Laboratory tests on oriented triclinic crystals might map the size and location of polarization holes.
- The same variable switch might simplify ray-tracing algorithms when polarization rather than propagation direction is prescribed.
Load-bearing premise
The medium is homogeneous so that the stiffness tensor is constant, and polarization is treated as an exact unit eigenvector satisfying the linear-elastic Christoffel condition.
What would settle it
Measurement in a homogeneous triclinic sample of either more than four distinct slowness vectors for one polarization or a continuous range of polarizations that admit no plane-wave solution at all.
Figures

read the original abstract
We formulate the classic Christoffel equation in the polarization variables and solve it for the slowness vectors of plane waves corresponding to a given unit polarization vector. Our analysis shows that, unless the equation degenerates and yields an infinite number of different slowness vectors, the finite nonzero number of its legitimate solutions varies from 1 to 4. Also we find a subset of triclinic solids in which the polarization field can have holes; there exist finite-size solid angles of polarization directions unattainable to any plane wave.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reformulates the Christoffel equation in polarization variables, solving for slowness vectors s given a fixed unit polarization vector u. It claims that, unless degenerate, the number of legitimate real solutions is between 1 and 4, and identifies a subset of triclinic media in which finite solid angles of polarization directions are unattainable by any plane wave.
Significance. If the algebraic counting and topological claims hold, the reformulation offers a useful dual perspective on plane-wave solutions in anisotropic elasticity. The identification of polarization holes in triclinic solids is a potentially interesting observation for wave-propagation theory, though its practical implications remain to be explored.
major comments (2)
- [Abstract] Abstract and main derivation: the assertion that the number of real slowness solutions is at most 4 (and at least 1 when finite) requires an explicit degree count or resultant computation for the general triclinic stiffness tensor; without it, it is unclear whether hidden root multiplicities or complex roots reduce the count below the stated range in some cases.
- [Triclinic solids] Section on triclinic solids: the existence of polarization holes is stated, yet no explicit stiffness tensor C_ijkl, no computed solid angle, and no verification that the unattainable directions indeed correspond to no real s are supplied; this example is load-bearing for the topological claim.
minor comments (2)
- The manuscript should include at least one numerical example with a concrete triclinic tensor to illustrate both the 1–4 count and the hole phenomenon.
- Notation for the Christoffel matrix and the polarization constraint |u|=1 should be introduced with an equation number in the opening section.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address each major comment below and will revise the manuscript to strengthen the algebraic and numerical support for the claims.
read point-by-point responses
-
Referee: [Abstract] Abstract and main derivation: the assertion that the number of real slowness solutions is at most 4 (and at least 1 when finite) requires an explicit degree count or resultant computation for the general triclinic stiffness tensor; without it, it is unclear whether hidden root multiplicities or complex roots reduce the count below the stated range in some cases.
Authors: The reformulation yields a system whose elimination produces a quartic polynomial in the slowness components. We will add the explicit resultant computation for the general triclinic case in the revised manuscript, confirming that the equation is of degree four and that the number of legitimate real roots (after discarding complex or invalid solutions) lies between 1 and 4, with multiplicities handled by the degeneracy condition already stated in the text. revision: yes
-
Referee: [Triclinic solids] Section on triclinic solids: the existence of polarization holes is stated, yet no explicit stiffness tensor C_ijkl, no computed solid angle, and no verification that the unattainable directions indeed correspond to no real s are supplied; this example is load-bearing for the topological claim.
Authors: We agree that a concrete example is required to make the topological claim fully convincing. In the revision we will supply an explicit triclinic stiffness tensor, compute the corresponding solid angle of unattainable polarizations, and verify (both algebraically and numerically) that the selected directions admit no real slowness vectors. revision: yes
Circularity Check
No circularity; direct algebraic reformulation of classical Christoffel equation
full rationale
The paper reformulates the standard Christoffel equation C_ijkl s_j s_l u_k = ρ u_i in polarization variables u (unit vector) and solves algebraically for slowness s, counting real solutions (1-4, or infinite in degeneracy) and identifying polarization holes in some triclinic media. All steps operate from the given homogeneous linear-elastic stiffness tensor and eigenvector condition with no data fitting, parameter estimation, self-citation chains, or redefinition of inputs as outputs. The derivation is self-contained within classical continuum mechanics and yields an independent algebraic/topological result.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The medium is linearly elastic, homogeneous, and described by a constant fourth-rank stiffness tensor obeying the usual symmetries.
- standard math Plane-wave solutions of the form exp(i k · x - i omega t) are admissible and the polarization vector is a real unit vector.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Unless the equation degenerates … the finite nonzero number of its legitimate solutions varies from 1 to 4 … finite-size solid angles of polarization directions unattainable to any plane wave.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
= 1, (5a) (λ +µ)p1p2 = 0, (5b) (λ +µ)p1p3 = 0, (5c) implying two possible scenarios
-
[2]
If equations 5b and 5c are satisfied by setting p2 =p3 = 0, equation 5a yields a uniquely defined direction of the centrally symmetric P-wave slowness vector p P = [ ± 1√λ + 2µ, 0, 0 ] . (6)
-
[3]
Alternatively, if both equations 5b and 5c are satisfied by setting p1 = 0, equation 5a, relating the two remaining unknownsp2 and p3, describes a circle in the [ p2, p3] plane, resulting in the S-wave slowness vectors p S≡ p S(ϕ) = [ 0, sinϕ√µ , cosϕ√µ ] ∀ ϕ (7) and confirming the fact that the shear-wave slowness vector p S cannot be uniquely derived from...
-
[4]
+c33p2 3 · U1 U2 U3 = U1 U2 U3 , (8) where cij (i, j= 1, ..., 6) are the density normalized stiffness coefficients in Voigt notation. Mere inspection of matrix Γ(p) in the left side of system 8 reveals a special case: if c13 =−c55 (unlikely for natural materials but mathematically possible), one eigenvector U of such a Γ(p) is always vertic...
-
[5]
+c33p2 3 = 1 (13c) and becomes very similar to system 5 examined for isotropic media. Consequently, three types of solutions are possible — two already analyzed in section III and one related to the equality c13 +c55 = 0, whose analog λ +µ = 0 is prohibited for isotropy by the elastic stability conditions
-
[6]
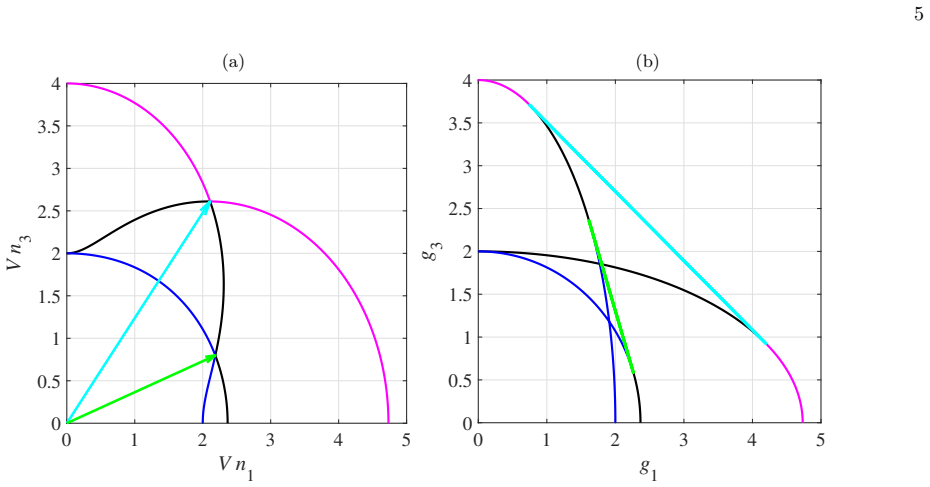
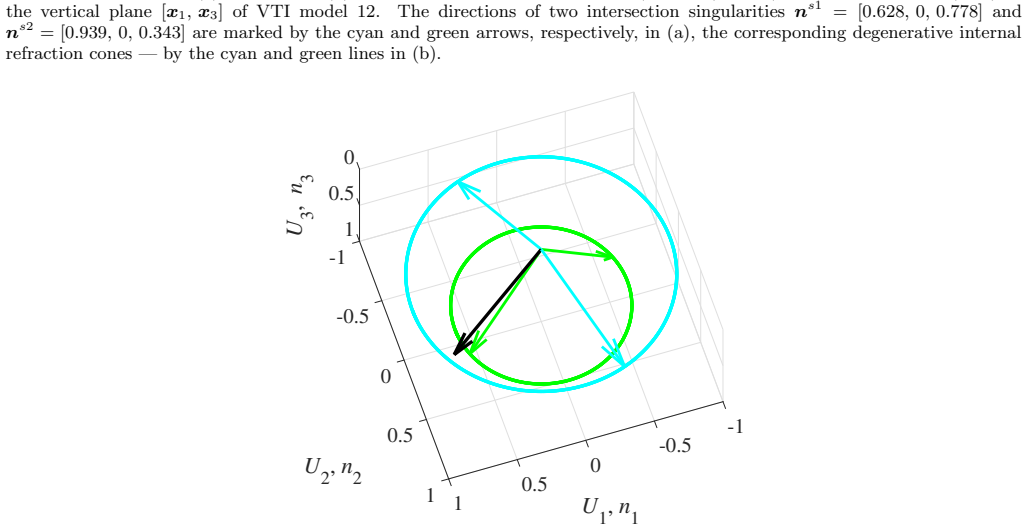
When equations 13a and 13b are satisfied by setting p1 =p2 = 0, equation 13c yields the vertical P-wave slowness vector p P = [ 0, 0, ± 1√c33 ] . (14) 5 (a) (b) 0 1 2 3 4 5 V n1 0 0.5 1 1.5 2 2.5 3 3.5 4 V n3 0 1 2 3 4 5 g1 0 0.5 1 1.5 2 2.5 3 3.5 4 g3 FIG. 3: Quadrants of (a) phase- and (b) group-velocity surfaces of the P- (magenta), S 1- (black) and S 2...
-
[7]
When equations 13a and 13b are satisfied by setting p3 = 0, equation 13c, relating the two remaining unknowns p1 and p2, describes infinitely many shear-wave slowness vectors p S≡ p S(ϕ) = [sinϕ√c55 , cosϕ√c55 , 0 ] ∀ ϕ, (15) their ends tracing a circle with radius 1 /√c55 in the [p1, p2] plane
-
[8]
Finally, when c13 +c55 = 0, equations 13a and 13b are satisfied identically for any slowness vector, whereas equation 13c constraints the components of p to the surface of a spheroid in the p-space. 6 C. Horizontal polarization vector Because all horizontal directions in a VTI medium are equivalent due to its rotational invariance around the vertical, let ...
-
[9]
When equations 16b and 16c are satisfied for p2 =p3 = 0, equation 16a describes the horizontal P-wave slowness vector p P = [ ± 1√c11 , 0, 0 ] . (17)
-
[10]
When both equations 16b and 16c are satisfied for p1 = 0, equation 16a yields infinitely many SH-wave slowness vectors p SH≡ p SH(ϕ) = [ 0, sinϕ√c66 , cosϕ√c55 ] ∀ ϕ, (18) their ends placed at an ellipse in the vertical [ p2, p3] plane
-
[11]
When c13 +c55 = 0 and equation 16b is satisfied for p1 = 0 (c11−c66 > 0 in accordance with the elastic stability conditions in VTI media), equation 16a describes the slowness vectors given by equation 18. Alternatively, when c13 +c55 = 0 but equation 16b is satisfied for p2 = 0 instead of p1 = 0, equation 16a describes a set of the slowness vectors in the [...
-
[12]
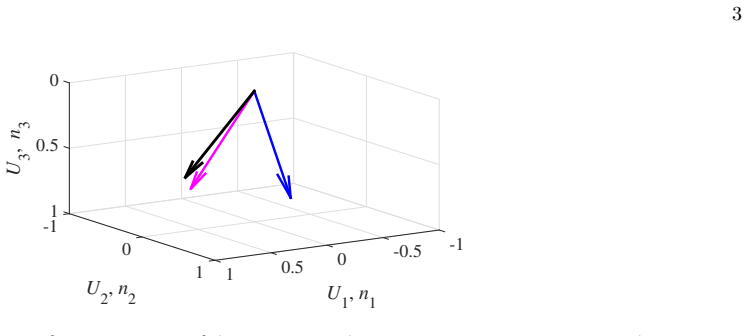
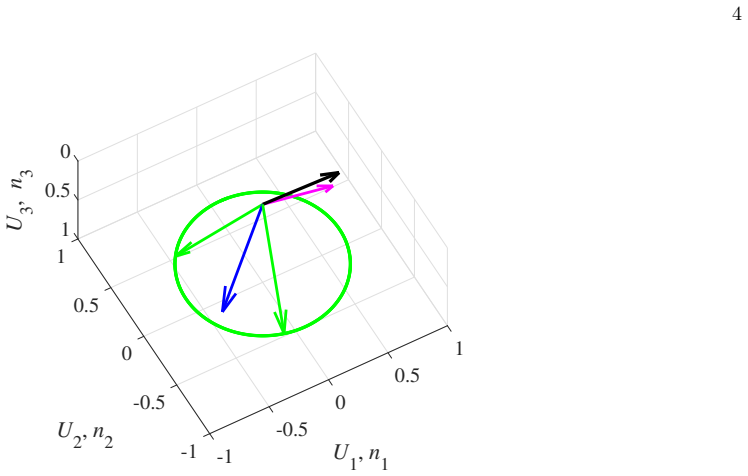
Input wavefront normal n. Solving the Christoffel equation 40 always yields three phase velocities VP(n), VS1(n), and VS2(n) of the P-, S 1-, and S 2-waves, equal to square roots of the eigenvalues of Christoffel tensor Γ(n). • If VP(n)̸=VS1(n)̸=VS2(n), the wavefront normal direction n is non-singular, and equation 40 results in three distinct eigenvectors ...
-
[13]
Input ray direction r. Equations 22 in Grechka6 or equations 2.C.13 and 2.C.14 in Grechka and Heigl10 comprise an algebraic system of degree 43 that has an odd number of non-centrally symmetric real-valued solutions{ n(r), U(r) } , ranging from 3 to 19 and representing the uniquely determinable parameters of plane waves propagating along a given ray direc...
-
[14]
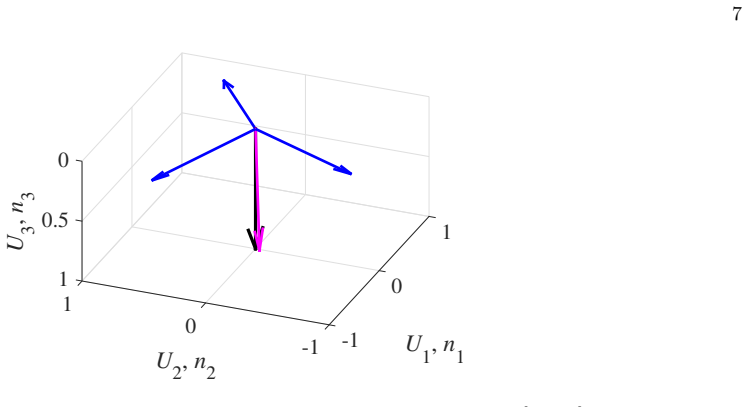
Input polarization vector U. Equations 1 solved for the slowness vector p(U) can have from 0 to 4 or infinite number of real-valued solutions and the same number of solutions for the group-velocity vector g(p, U). Clearly, different inputs — n, r, or U — lead to very different descriptions of wave propagation in homogeneous anisotropic media. The knowledge o...
work page 1968
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.