A Bayesian time-varying random partition model for large spatio-temporal datasets
Pith reviewed 2026-05-24 05:08 UTC · model grok-4.3
The pith
A Bayesian model with a novel random partition prior clusters spatio-temporal data into time-varying spatial groups based on proximity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that the proposed semi-parametric hierarchical Bayesian model, which incorporates temporal changepoint components for regime shifts and a novel random partition prior that encourages co-clustering based on areal proximity, enables joint time-varying and spatial model-based clustering for large spatio-temporal datasets.
What carries the argument
The novel random partition prior that incorporates the desired spatial features and encourages co-clustering based on areal proximity, used inside a hierarchical Bayesian setup with temporal changepoints occurring within fixed time windows.
If this is right
- The model identifies distinct spatial clusters of usage patterns that differ across work hours, nights, weekdays, and weekends.
- It supports analysis of large datasets via its semi-parametric structure and Bayesian uncertainty quantification.
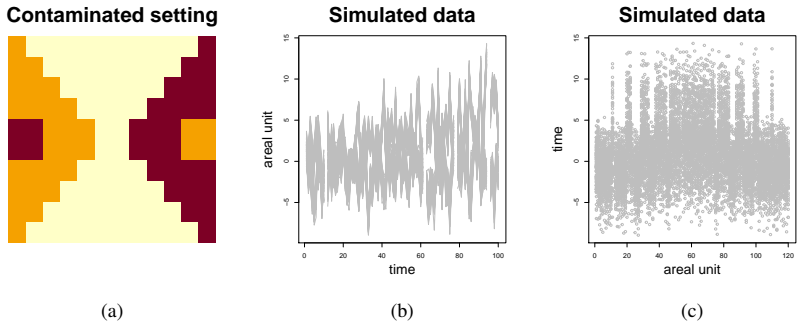
- Simulation studies allow direct assessment of the prior's ability to recover known partitions under controlled spatial and temporal conditions.
- The Milan application produces clusters that reflect changing population movement patterns across the metropolitan area.
Where Pith is reading between the lines
- The same prior structure could be tested on other areal datasets such as traffic counts or pollution measurements to check whether proximity-based clustering generalizes.
- Allowing the changepoint windows themselves to be estimated from data rather than fixed in advance would remove one modeling restriction.
- If the recovered clusters align with known urban zones, they could support downstream tasks such as resource allocation without additional spatial modeling.
- The framework might be combined with non-Bayesian clustering methods for faster initial exploration before full posterior sampling.
Load-bearing premise
The approach assumes a known neighbouring structure for the spatial correlation and that changepoints occur within fixed time windows over the day.
What would settle it
Simulation experiments in which the true spatial partitions and temporal regimes are known in advance but the model recovers them with low accuracy, or application to the Milan mobile phone data that yields clusters unrelated to observable usage differences between work, night, and weekend periods.
Figures




























read the original abstract
Spatio-temporal areal data can be seen as a collection of time series which are spatially correlated, according to a specific neighbouring structure. Motivated by a dataset on mobile phone usage in the Metropolitan area of Milan, Italy, we propose a semi-parametric hierarchical Bayesian model allowing for time-varying as well as spatial model-based clustering. Our approach incorporates the notion of regimes that describe changing patterns over work and night hours as well as weekdays/weekends. Changes across regimes are considered by means of temporal changepoint components that allow for different hierarchical structures specified across time points. The changepoints might occur within fixed time windows over the day. The model features a novel random partition prior that incorporates the desired spatial features and encourages co-clustering based on areal proximity. We explore properties of the model by way of extensive simulation studies from which we collect valuable information. Finally, we discuss the application to the motivating data, where the main goal is to spatially cluster population patterns of mobile phone usage.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a semi-parametric hierarchical Bayesian model for spatio-temporal areal data allowing time-varying and spatial model-based clustering. It introduces a novel random partition prior that incorporates spatial proximity to encourage co-clustering of areal units, combined with temporal changepoint components operating within fixed time windows to capture regime shifts (e.g., work/night hours and weekdays/weekends). The approach is motivated by mobile-phone usage data in Milan; properties are explored via simulation studies and the model is applied to the motivating dataset.
Significance. If the novel random partition prior and the hierarchical regime structure perform as described, the framework could advance Bayesian clustering methods for large spatio-temporal areal datasets by explicitly encoding spatial dependence and temporal non-stationarity. The simulation studies and real-data application provide the primary evidence base for assessing practical utility.
minor comments (3)
- [Abstract] Abstract: the phrase 'changes across regimes are considered by means of temporal changepoint components that allow for different hierarchical structures specified across time points' is underspecified; a brief indication of how the partition prior is updated across changepoints would clarify the central modeling claim.
- [Abstract] Abstract: 'we explore properties of the model by way of extensive simulation studies from which we collect valuable information' does not report any quantitative metrics, recovery rates, or comparisons; adding one sentence summarizing the main simulation findings would strengthen the abstract.
- The assumption of a known neighbouring structure is stated but its sensitivity is not addressed in the provided text; a short discussion or sensitivity check would be useful even if placed in supplementary material.
Simulated Author's Rebuttal
We thank the referee for their positive summary of the manuscript and the recommendation for minor revision. The referee's description accurately reflects the proposed semi-parametric hierarchical Bayesian model, the novel spatial random partition prior, the regime-based temporal changepoint structure, the simulation studies, and the Milan mobile-phone application.
Circularity Check
No significant circularity
full rationale
The paper proposes a new semi-parametric hierarchical Bayesian model with a novel random partition prior designed to incorporate spatial proximity for areal co-clustering, along with time-varying regimes via changepoints in fixed windows. This is a constructive modeling contribution whose core elements are defined directly by the authors' modeling choices rather than derived from prior results that reduce to the same inputs. Simulations explore model properties and an application to Milan mobile phone data is presented; neither constitutes a 'prediction' that is forced by the model's own equations. No load-bearing self-citations, uniqueness theorems, or ansatzes smuggled via prior work are indicated in the abstract or description. The derivation chain is self-contained as a model specification exercise.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
update ymis: for i and t such that the observation is missing: ymis it |yobs, rt, srt i , βsrt i rt ∼ N(x′ tβsrt i rt + uirt, σ2 ϵrt )
-
[2]
update β∗ r, for r = 1, . . . , nR. For each j = 1, . . . , Kr, sample from: p(β∗ jr |y, ϕ) ∝ NK(µβr, Σβr) Y t:rt=r Y i∈Crt j N(yit|x′ tβ∗ sr i r + uir, σ2 ϵr) ∝ exp{−1 2(β∗ jr − µβr)′Σ−1 βr (β∗ jr − µβr) − 1 2σ2 ϵr X t:rt=r X i∈Crt j (yit − x′ tβ∗ jr − uir)2} yielding β∗ jr |y, ϕ ∼ NK(mβ∗ jr , Sβ∗ jr), where Sβ∗ jr = Σ−1 βr + nr j σ2 ϵr X t:rt=r xtx′ t !...
-
[3]
update µβr , Σβr, for r = 1, . . . , nR. We impose a diagonal structure on the covariance matrix, such that Σβr = diagK(σ2 βr1, . . . , σ2 βrK). Thus, the joint prior distribution is: p(µβr, Σβr) = NK(mµβr , diagK(σ2 βr1, . . . , σ2 βrK)) KY l=1 inv-Gamma(aΣβr , bΣβr ) 38 and the full conditionals are: σ2 βrl|y, ϕ ∼ inv-Gamma aσ2 βr + 1 + Kr 2 , bσ2...
-
[4]
(i) update sr, for r = 1, . . . , nR. For each i = 1, . . . , I, sample from: P (sr i = j|y−i, sr −i, ρ−i r , β∗ r , r, uir, σ2 ϵr, κ, ξ) ∝ n−i j e−ξℓj({i})Q t:rt=r N(yit|x′ tβ∗ jr + uir, σ2 ϵr), j = 1, . . . , K−i r κe−ξℓj({i}) R RK Q t:rt=r N(yit|x′ tβ + uir, σ2 ϵr)P0(β)dβ, j = K −i r + 1 The integral in the second line is the density of a multi...
work page 2000
-
[5]
update ur = (u1r, . . . , uIr), for r = 1, . . . , nR by sampling: p(ur|y, ϕ) = NI (ur|mur, Sur) Sur = Q(ζr, W) τ 2 r + mr σ2 ϵr II −1 mur = Sur Q(ζr, W) τ 2 r µu + 1 σ2 ϵr X t:rt=r (yt − x′ tβ∗ srr) ! where mr is the size of {t : rt = r}, and will depend on the change-points. 40
-
[6]
because τ 2 r ∼ inv-Gamma(aτ 2r , bτ 2r ), then: τ 2 r |y, ϕ ∼ inv-Gamma aτ 2r + I 2 , bτ 2r + 1 2 u′ rQ(ζr, W)ur
-
[7]
update σ2 ϵr, by sampling: p σ2 ϵr|y, ϕ = inv-Gamma σ2 ϵr aσ2ϵr + IT 2 , bσ2ϵr + 1 2 TX t=1 IX i=1 (yit − x′ tβit − uit)2 !
-
[8]
update ¯tm, for m = 1, . . . , M − 1 from the full conditional proportional to: p (¯tm|y, ϕ) ∝ I{λm−nλ,...,λm+nλ}(¯tm) Y j1∈{λm−nλ,...,¯tm} IY i=1 N yij1|x′ j1β∗ sr1 i r1 + uir1, σ2 ϵr1 Y j2∈{¯tm+1,...,λm+nλ} IY i=1 N yij2|x′ j2β∗ sr2 i r2 + uir2, σ2 ϵr2 where r1 = r¯tm and r2 = r¯tm+1. To improve the mixing of the change-points ¯tm, we im...
work page 2008
-
[9]
RS-aPPM, DP version ( ξ = 0)
-
[10]
RS-aPPM, parametric version (one cluster)
-
[11]
RS-aPPM, HB version: setting κ = 1 and dropping the Γ(nr j) terms in (14)
-
[12]
ST.CARar ( ρ = 0.95) All the models are evaluated on the same dataset as in Section 4. Simulations for the all six models are run for a total of 50,000 iterations after 100 iterations used as burn-in for the adaptive part of the MCMC algorithm. Thus, the last 5,000 iterations are thinned every second one to retain a sample of size 2,500. We report in Tabl...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.