On L^infty stability for wave propagation and for linear inverse problems
Pith reviewed 2026-05-23 19:01 UTC · model grok-4.3
The pith
The linear wave equation is unstable in L^∞, but regularizing its Fourier multipliers produces a stable solution method that extends to inverse problems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The linear wave equation is not stable in L^∞, and we design an alternative solution method based on the regularization of Fourier multipliers, which is stable in L^∞. Furthermore, we show how these ideas can be extended to inverse problems, and design a regularization method for the inversion of compact operators that is stable in L^∞.
What carries the argument
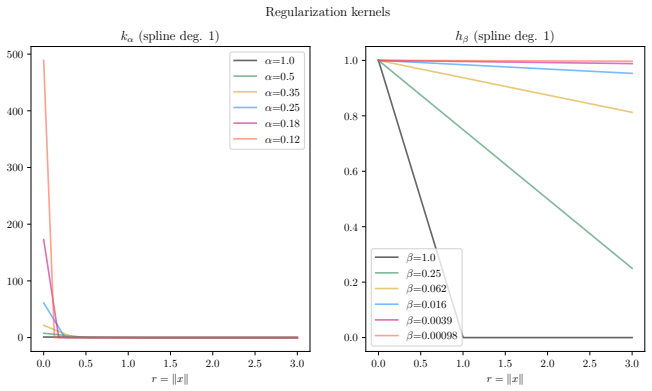
Regularization of Fourier multipliers, which damps high-frequency components to control the L^∞ norm of wave solutions and operator inverses.
If this is right
- Wave solutions can be computed with explicit L^∞ stability bounds via the regularized multipliers.
- Inversion formulas for compact operators become stable in L^∞ after the same regularization step.
- Stability analysis for hyperbolic PDEs can shift focus from L² energy estimates to pointwise L^∞ control.
- Neural networks modeled by hyperbolic PDEs can inherit L^∞ stability from the regularized forward map.
Where Pith is reading between the lines
- The regularization parameter could be chosen adaptively from data to balance stability and accuracy in applications with noisy observations.
- The method might extend to other linear hyperbolic systems whose solutions involve Fourier multipliers, such as the Maxwell equations.
- Numerical experiments on concrete inverse problems like limited-angle tomography could quantify the practical gain in local feature recovery.
Load-bearing premise
Regularizing the Fourier multipliers achieves L^∞ stability without unacceptable loss of the original wave propagation properties or introduction of artifacts that invalidate the solution.
What would settle it
A numerical test in which the regularized wave solution differs from the exact solution by more than a fixed tolerance in the L^∞ norm for a smooth, compactly supported initial condition.
Figures







read the original abstract
Stability is a key property of both forward models and inverse problems, and depends on the norms considered in the relevant function spaces. For instance, stability estimates for hyperbolic partial differential equations are often based on energy conservation principles, and are therefore expressed in terms of $L^2$ norms. The focus of this paper is on stability with respect to the $L^\infty$ norm, which is more relevant to detect localized phenomena. The linear wave equation is not stable in $L^\infty$, and we design an alternative solution method based on the regularization of Fourier multipliers, which is stable in $L^\infty$. Furthermore, we show how these ideas can be extended to inverse problems, and design a regularization method for the inversion of compact operators that is stable in $L^\infty$. We also discuss the connection with the stability of deep neural networks modeled by hyperbolic PDEs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript asserts that the standard linear wave equation is unstable in the L^∞ norm. It introduces a regularization of Fourier multipliers as an alternative evolution that achieves L^∞ stability for wave propagation. The approach is extended to construct a regularization method for the inversion of compact operators that is stable in L^∞. The paper also discusses connections between these ideas and the stability of deep neural networks modeled by hyperbolic PDEs.
Significance. If the regularized evolution is shown to converge to the original wave solution with explicit error control while preserving key properties such as finite propagation speed, the results could provide a useful tool for applications that require L^∞ control on localized phenomena. The extension to stable L^∞ inversion of compact operators would similarly be of interest if the approximation quality is quantified. The link to DNN stability is potentially novel but its significance depends on the depth of the connection established.
major comments (1)
- [Main results on wave propagation (likely §3–4)] The central claim that the regularized Fourier-multiplier evolution serves as a stable proxy for the original wave equation requires explicit quantification of the approximation error (e.g., an L^∞ bound on the difference between the two solutions that vanishes as the regularization parameter tends to zero) together with verification that the regularized symbol retains the hyperbolicity and domain-of-dependence properties of the wave operator. No such estimates appear in the abstract or are referenced in the provided description of the main results; without them the L^∞ stability result applies only to a modified evolution whose relation to the original PDE remains unquantified.
minor comments (2)
- [Introduction] The abstract states that the linear wave equation 'is not stable in L^∞' but does not cite the precise sense (e.g., failure of continuous dependence on initial data in L^∞) or the counter-example used; a brief reference or short derivation in the introduction would clarify the starting point.
- [Final section on DNN connection] The discussion of deep neural networks modeled by hyperbolic PDEs is mentioned only at the end of the abstract; the manuscript should indicate whether the regularization is applied directly to the network dynamics or only used as an analogy.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The major comment identifies a genuine gap in the current manuscript regarding error quantification and preservation of structural properties. We address this point below and will incorporate the requested material in the revision.
read point-by-point responses
-
Referee: [Main results on wave propagation (likely §3–4)] The central claim that the regularized Fourier-multiplier evolution serves as a stable proxy for the original wave equation requires explicit quantification of the approximation error (e.g., an L^∞ bound on the difference between the two solutions that vanishes as the regularization parameter tends to zero) together with verification that the regularized symbol retains the hyperbolicity and domain-of-dependence properties of the wave operator. No such estimates appear in the abstract or are referenced in the provided description of the main results; without them the L^∞ stability result applies only to a modified evolution whose relation to the original PDE remains unquantified.
Authors: We agree that the manuscript currently lacks explicit L^∞ error bounds between the regularized and original solutions, as well as a direct verification that the regularized multiplier preserves hyperbolicity and finite propagation speed. In the revised version we will add these estimates in a new subsection of §3 (or §4). Specifically, we will derive an L^∞ convergence rate as the regularization parameter tends to zero by combining the Fourier representation with standard multiplier estimates and Sobolev embedding. We will also show that the regularized symbol remains strictly hyperbolic and that the associated fundamental solution has support contained in the light cone of the original wave operator, thereby retaining the domain-of-dependence property. These additions will make the approximation relation quantitative and will be referenced already in the abstract. revision: yes
Circularity Check
No circularity: no derivation chain or equations visible for inspection
full rationale
The abstract states the linear wave equation lacks L^∞ stability and proposes regularization of Fourier multipliers as an alternative, plus extensions to inverse problems. However, the provided text contains zero equations, no derivation steps, no self-citations, and no fitted parameters or ansatzes. Without any load-bearing mathematical steps to examine, no reduction to inputs by construction can be exhibited. This is the default honest outcome when the paper's claimed chain is not supplied for review.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
R. Alaifari, G. S. Alberti, and T. Gauksson. ADef: an iterative algorithm to construct adversarial deformations. In Proceedings of the International Conference on Learning Representations (ICLR 2019), 2019
work page 2019
-
[2]
R. Alaifari, G. S. Alberti, and T. Gauksson. Localized adversarial artifacts for com- pressed sensing MRI. SIAM Journal on Imaging Sciences , 16(4):SC14–SC26, 2023
work page 2023
- [3]
-
[4]
B. Biggio, I. Corona, D. Maiorca, B. Nelson, N. ˇSrndi´ c, P. Laskov, G. Giacinto, and F. Roli. Evasion attacks against machine learning at test time. In Joint European Conference on Machine Learning and Knowledge Discovery in Databases , pages 387– 402, New York, 2013. Springer
work page 2013
-
[5]
N. Carlini and D. Wagner. Towards evaluating the robustness of neural networks. In IEEE Symposium on Security and Privacy (SP) , pages 39–57. IEEE, 2017
work page 2017
-
[6]
R. T. Q. Chen, Y. Rubanova, J. Bettencourt, and D. K. Duvenaud. Neural ordinary differential equations. In S. Bengio, H. Wallach, H. Larochelle, K. Grauman, N. Cesa- Bianchi, and R. Garnett, editors, Advances in Neural Information Processing Systems, volume 31. Curran Associates, Inc., 2018. URL https://proceedings.neurips.cc/ paper_files/paper/2018/file/...
work page 2018
-
[7]
W. E. A proposal on machine learning via dynamical systems. Commun. Math. Stat. , 5(1):1–11, 2017. ISSN 2194-6701,2194-671X. doi: 10.1007/s40304-017-0103-z. URL https://doi.org/10.1007/s40304-017-0103-z
-
[8]
H. W. Engl, M. Hanke, and A. Neubauer. Regularization of Inverse Problems . Kluwer Academic Publishers, Dordrecht, The Netherlands, 2000. 24
work page 2000
-
[9]
L. C. Evans. Partial differential equations, volume 19. American Mathematical Society, 2022
work page 2022
-
[10]
M. Genzel, J. Macdonald, and M. M¨ arz. Solving inverse problems with deep neural networks - robustness included. IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(1):1119–1134, 2022. doi: 10.1109/TPAMI.2022.3148324
-
[11]
I. Goodfellow, Y. Bengio, and A. Courville. Deep Learning. MIT Press, 2016. http: //www.deeplearningbook.org
work page 2016
-
[12]
I. J. Goodfellow, J. Shlens, and C. Szegedy. Explaining and harnessing adversarial examples. arXiv preprint arXiv:1412.6572 , 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
- [13]
-
[14]
E. Haber and L. Ruthotto. Stable architectures for deep neural networks. Inverse Problems, 34(1):014004, 22, 2018. ISSN 0266-5611,1361-6420. doi: 10.1088/1361-6420/ aa9a90. URL https://doi.org/10.1088/1361-6420/aa9a90
-
[15]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , pages 770–778, 2016. doi: 10.1109/CVPR.2016.90
-
[16]
C. F. Higham and D. J. Higham. Deep learning: An introduction for applied math- ematicians. SIAM Review , 61(4):860–891, 2019. doi: 10.1137/18M1165748. URL https://doi.org/10.1137/18M1165748
-
[17]
N. Kalton and S. Montgomery-Smith. Interpolation of Banach spaces. handbook of the geometry of Banach spaces, vol. 2, 1131–1175. North-Holland, Amsterdam , 164:165, 2003
work page 2003
- [18]
-
[19]
S.-M. Moosavi-Dezfooli, A. Fawzi, and P. Frossard. Deepfool: a simple and accurate method to fool deep neural networks. In Proceedings of the IEEE conference on com- puter vision and pattern recognition , pages 2574–2582, 2016
work page 2016
-
[20]
P. M¨ obius. Dautray, r.; lions, j.-l., mathematical analysis and numerical methods for science and technology. vol.5: Evolution problems i. berlin etc., springer-verlag 1992. xiv, 709 pp., dm 198,oo. isbn 3-540-50205-x. ZAMM - Journal of Applied Mathe- matics and Mechanics / Zeitschrift f¨ ur Angewandte Mathematik und Mechanik , 74 (2):104–104, 1994. doi...
-
[21]
J. C. Peral. lp estimates for the wave equation. Journal of Functional Analysis , 36(1): 114–145, 1980. ISSN 0022-1236. doi: https://doi.org/10.1016/0022-1236(80)90110-X. URL https://www.sciencedirect.com/science/article/pii/002212368090110X. 25
-
[22]
L. Ruthotto and E. Haber. Deep neural networks motivated by partial differential equations. Journal of Mathematical Imaging and Vision , 62(3):352–364, 2020. doi: 10.1007/s10851-019-00903-1. URL https://doi.org/10.1007/s10851-019-00903-1
-
[23]
T. Schuster, B. Kaltenbacher, B. Hofmann, and K. S. Kazimierski. Regularization Methods in Banach Spaces . De Gruyter, Berlin, Boston, 2012. ISBN 9783110255720. doi: doi:10.1515/9783110255720. URL https://doi.org/10.1515/9783110255720
-
[24]
C. D. Sogge. Lp estimates for the wave equation and applications. Journ´ ees ´ equations aux d´ eriv´ ees partielles, pages 1–12, 1993
work page 1993
-
[25]
Intriguing properties of neural networks
C. Szegedy, W. Zaremba, I. Sutskever, J. Bruna, D. Erhan, I. Goodfellow, and R. Fer- gus. Intriguing properties of neural networks. arXiv preprint arXiv:1312.6199 , 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[26]
V. Vladimirov. Equations of Mathematical Physics . Marcel Dekker Inc., New York, New York, 1971
work page 1971
-
[27]
C. Xiao, J.-Y. Zhu, B. Li, W. He, M. Liu, and D. Song. Spatially transformed adversarial examples. In International Conference on Learning Representations, 2018. URL https: //openreview.net/forum?id=HyydRMZC-. A Proofs We collect here some proofs and auxiliary results. Proof of Theorem 2.3. We assume that A(X ∩ X ′) ⊆ Y ∩ Y ′ (i.e. no adversarial pertur- ...
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.