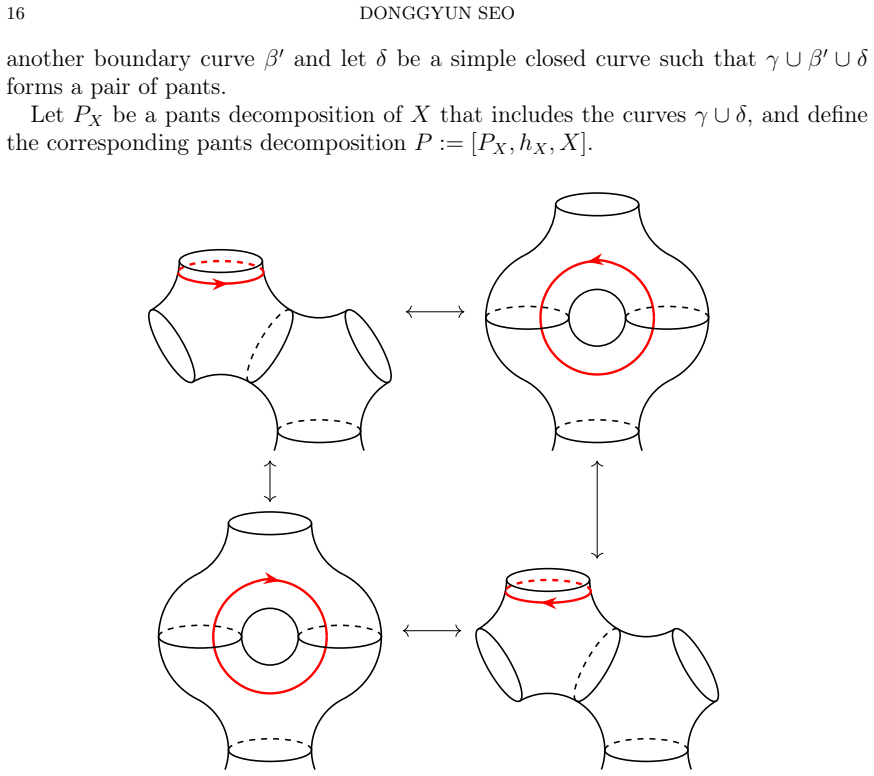
The Pants Graph of a Free Group
Pith reviewed 2026-05-23 19:07 UTC · model grok-4.3
The pith
The outer automorphism group of a free group acts isometrically on its pants graph with a coarsely surjective orbit map, and there is a coarsely Lipschitz map to the free splitting complex.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A pants decomposition of a free group is introduced, leading to the pants graph consisting of all such decompositions. The natural isometric action of the outer automorphism group induces a coarsely surjective orbit map. A coarsely Lipschitz map from the pants graph to the free splitting complex is constructed. These imply the pants graph is connected and unbounded.
What carries the argument
The pants graph, the simplicial graph whose vertices are pants decompositions of the free group.
If this is right
- The pants graph is path-connected.
- The diameter of the pants graph is infinite.
- Every point in the pants graph lies at bounded distance from the orbit of any basepoint under Out(F).
- Distances in the pants graph coarsely dominate distances in the free splitting complex via the constructed map.
Where Pith is reading between the lines
- The two maps together may allow results proved on the free splitting complex to be pulled back to the pants graph up to coarse distortion.
- One could check whether the pants graph is quasi-isometric to other known Out(F_n)-complexes.
- The construction supplies a concrete combinatorial model in which to test geometric properties of outer automorphism groups that were previously studied only on the splitting complex.
Load-bearing premise
Pants decompositions of free groups can be defined so that the resulting simplicial graph admits an isometric Out(F) action and a coarsely Lipschitz map to the free splitting complex.
What would settle it
An explicit pair of pants decompositions in some free group F_n whose distance in the pants graph cannot be bounded by any function of their distance in the free splitting complex.
Figures









read the original abstract
We introduce the concept of a pants decomposition for a finitely generated free group and construct the corresponding pants graph. A pants decomposition of a free group leads to the formation of a simplicial graph, referred to as the pants graph of a free group, consisting of all possible pants decompositions. The natural isometric action of the outer automorphism group of the free group on the pants graph induces a coarsely surjective orbit map. Additionally, we construct a coarsely Lipschitz map from the pants graph to the free splitting complex. These results imply that the pants graph of a free group is both connected and unbounded.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the notion of a pants decomposition for a finitely generated free group and defines the associated pants graph as the simplicial graph whose vertices are these decompositions. It establishes that Out(F_n) acts isometrically on this graph with a coarsely surjective orbit map, constructs a coarsely Lipschitz map from the pants graph to the free splitting complex, and concludes from these that the pants graph is connected and unbounded.
Significance. If the results hold, the construction provides a new combinatorial model for the action of Out(F_n), analogous to the pants graph in the surface case, and links it via a coarse map to the free splitting complex. This could serve as a tool for studying the geometry of outer automorphisms of free groups, with the connectedness and unboundedness results forming a foundational step for further investigations in geometric group theory.
minor comments (3)
- The introduction would benefit from a brief comparison to existing complexes such as the free factor complex or the free splitting complex to clarify the novelty of the pants graph.
- Notation for the pants decompositions and the simplicial structure of the graph should be made consistent between the definition and the statements of the main theorems.
- The abstract states the implications for connectedness and unboundedness but does not indicate the rank n for which the results hold; this should be clarified in the introduction.
Simulated Author's Rebuttal
We thank the referee for their positive summary of the manuscript and for recommending minor revision. No specific major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The paper defines a new notion of pants decomposition for free groups and builds the associated simplicial pants graph from it. The claimed isometric Out(F_n) action, coarsely surjective orbit map, and coarsely Lipschitz map to the free splitting complex are presented as constructions on this newly defined object; the connectedness and unboundedness conclusions follow directly from those constructions. No equations, fitted parameters, self-citations, or prior results are invoked in a way that reduces any central claim to its own inputs by definition or by construction. The argument is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A pants decomposition of a finitely generated free group exists and assembles into a simplicial graph.
invented entities (1)
-
Pants decomposition of a free group
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Tarik Aougab, Matt Clay, and Yo'av Rieck, Thermodynamic metrics on outer space, Ergodic Theory Dynam. Systems 43 (2023), no. 3, 729--793. 4544143
work page 2023
-
[2]
Brock, The W eil- P etersson metric and volumes of 3-dimensional hyperbolic convex cores , J
Jeffrey F. Brock, The W eil- P etersson metric and volumes of 3-dimensional hyperbolic convex cores , J. Amer. Math. Soc. 16 (2003), no. 3, 495--535. 1969203
work page 2003
-
[3]
Young-Eun Choi and Kasra Rafi, Comparison between T eichm\" u ller and L ipschitz metrics , J. Lond. Math. Soc. (2) 76 (2007), no. 3, 739--756. 2377122
work page 2007
-
[4]
Marc Culler and Karen Vogtmann, Moduli of graphs and automorphisms of free groups, Invent. Math. 84 (1986), no. 1, 91--119. 830040
work page 1986
-
[5]
Taylor, The co-surface graph and the geometry of hyperbolic free group extensions, J
Spencer Dowdall and Samuel J. Taylor, The co-surface graph and the geometry of hyperbolic free group extensions, J. Topol. 10 (2017), no. 2, 447--482. 3653318
work page 2017
-
[6]
Stefano Francaviglia and Armando Martino, Metric properties of outer space, Publ. Mat. 55 (2011), no. 2, 433--473. 2839451
work page 2011
-
[7]
Allen Hatcher, Homological stability for automorphism groups of free groups, Comment. Math. Helv. 70 (1995), no. 1, 39--62. 1314940
work page 1995
-
[8]
Michael Handel and Lee Mosher, The free splitting complex of a free group, I : hyperbolicity , Geom. Topol. 17 (2013), no. 3, 1581--1672. 3073931
work page 2013
-
[9]
, The free splitting complex of a free group, II : L oxodromic outer automorphisms , Trans. Amer. Math. Soc. 372 (2019), no. 6, 4053--4105. 4009387
work page 2019
-
[10]
Allen Hatcher and William Thurston, A presentation for the mapping class group of a closed orientable surface, Topology 19 (1980), no. 3, 221--237. 579573
work page 1980
-
[11]
Allen Hatcher and Karen Vogtmann, The complex of free factors of a free group, Quart. J. Math. Oxford Ser. (2) 49 (1998), no. 196, 459--468. 1660045
work page 1998
-
[12]
Ilya Kapovich and Martin Lustig, Geometric intersection number and analogues of the curve complex for free groups, Geom. Topol. 13 (2009), no. 3, 1805--1833. 2496058
work page 2009
-
[13]
Ilya Kapovich and Kasra Rafi, On hyperbolicity of free splitting and free factor complexes, Groups Geom. Dyn. 8 (2014), no. 2, 391--414. 3231221
work page 2014
-
[14]
Feng Luo, Automorphisms of the complex of curves, Topology 39 (2000), no. 2, 283--298. 1722024
work page 2000
-
[15]
Brian Mann, Hyperbolicity of the cyclic splitting graph, Geom. Dedicata 173 (2014), 271--280. 3275303
work page 2014
-
[16]
Dan Margalit, Automorphisms of the pants complex, Duke Math. J. 121 (2004), no. 3, 457--479. 2040283
work page 2004
-
[17]
Bernhard Neumann, Die A utomorphismengruppe der freien G ruppen , Math. Ann. 107 (1933), no. 1, 367--386. 1512806
work page 1933
-
[18]
Jakob Nielsen, Die I somorphismengruppe der freien G ruppen , Math. Ann. 91 (1924), no. 3-4, 169--209. 1512188
work page 1924
-
[19]
Athanase Papadopoulos and Robert C. Penner, Hyperbolic metrics, measured foliations and pants decompositions for non-orientable surfaces, Asian J. Math. 20 (2016), no. 1, 157--182. 3460762
work page 2016
- [20]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.