Non-braid positive hyperbolic L-space knots
Pith reviewed 2026-05-19 08:26 UTC · model grok-4.3
The pith
Infinitely many hyperbolic L-space knots cannot be obtained as closures of positive braids.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We construct infinitely many hyperbolic L-space knots that are not braid positive, and our examples are distinct from those considered by Baker and Kegel.
What carries the argument
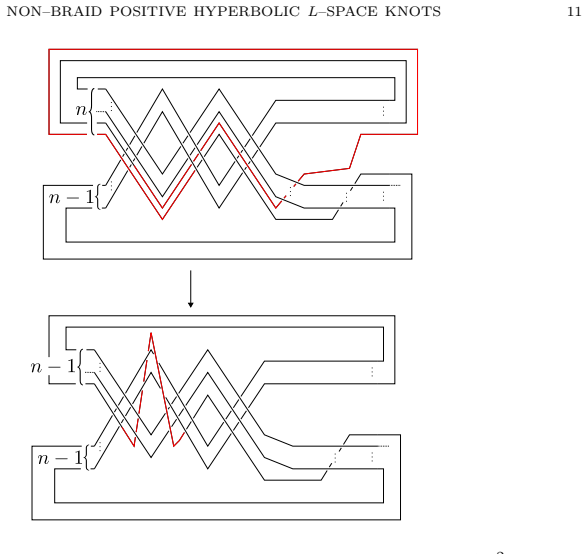
An explicit infinite family of knot diagrams that satisfy the positive-surgery L-space condition, have hyperbolic complements, and fail to be positive braid closures.
If this is right
- Hyperbolic L-space knots form a strictly larger class than the braid-positive ones.
- Positive Dehn surgery can produce L-spaces from knots that require mixed-sign crossings in any braid representation.
- Hyperbolicity persists in these explicitly constructed non-braid-positive L-space examples.
- The separation between braid positivity and the L-space property now rests on proven infinite families rather than candidates alone.
Where Pith is reading between the lines
- The same diagrammatic techniques might generate further families in other surgery or knot classes.
- These examples invite direct comparison of their Heegaard Floer or geometric invariants with those of known braid-positive L-space knots.
- It remains open whether non-braid-positive examples predominate among all hyperbolic L-space knots.
Load-bearing premise
The specific knots produced by the construction are simultaneously hyperbolic and L-space knots under positive surgery.
What would settle it
A direct verification that any one of the constructed knots is the closure of a positive braid would disprove its non-braid-positive status.
Figures
























read the original abstract
An $L$-space knot is a knot that admits a positive Dehn surgery yielding an $L$-space. Many known hyperbolic $L$-space knots are braid positive, meaning they can be represented as the closure of a positive braid. Recently, Baker and Kegel showed that the hyperbolic $L$-space knot $o9\_30634$ from Dunfield's census is not braid positive, and they constructed infinitely many candidates for hyperbolic $L$-space knots that may not be braid positive. However, it remains unproven whether their examples are genuinely non-braid positive. In this paper, we construct infinitely many hyperbolic $L$-space knots that are not braid positive, and our examples are distinct from those considered by Baker and Kegel.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript constructs an infinite family of hyperbolic L-space knots that admit no positive braid representation. The examples are obtained from a parametric family of diagrams distinct from the Baker-Kegel candidates; the authors verify that sufficiently positive Dehn surgery yields an L-space, that the complement is hyperbolic, and that no positive braid closes to the knot.
Significance. If the verifications hold uniformly, the result supplies the first explicit infinite family of non-braid-positive hyperbolic L-space knots, closing the gap left open by Baker-Kegel and providing concrete counterexamples to the conjecture that all hyperbolic L-space knots are braid positive.
major comments (2)
- [§3.2, Theorem 3.4] §3.2, Theorem 3.4: the hyperbolicity argument for the general member of the family is reduced to a volume computation on a single diagram together with a claim that the pattern persists; it is not shown that the essential-surface obstruction remains absent for all parameters, which is load-bearing for the infinitude claim.
- [§4.1, Proposition 4.2] §4.1, Proposition 4.2: non-braid-positivity is established via a signature obstruction that works for the first ten members but is asserted to hold for the whole family without a uniform lower bound on the braid index or a general monodromy argument; this needs a single proof that scales with the parameter.
minor comments (2)
- [Abstract] The abstract and introduction should state explicitly which invariants are used to certify the L-space property (e.g., which surgery formula or Heegaard-Floer computation).
- [Figure 1.1] Figure 1.1: the knot diagrams for the first two members have overlapping strands that obscure the crossing signs; a cleaner rendering would aid verification.
Simulated Author's Rebuttal
We thank the referee for their thorough review and valuable suggestions. We have carefully considered the major comments and will revise the manuscript to address the concerns regarding the uniformity of the hyperbolicity and non-braid-positivity arguments for the entire infinite family. Below we provide point-by-point responses.
read point-by-point responses
-
Referee: [§3.2, Theorem 3.4] the hyperbolicity argument for the general member of the family is reduced to a volume computation on a single diagram together with a claim that the pattern persists; it is not shown that the essential-surface obstruction remains absent for all parameters, which is load-bearing for the infinitude claim.
Authors: We agree that the presentation of Theorem 3.4 would be strengthened by an explicit uniform argument. In the revision we will insert a short lemma establishing that, for the parametric family of diagrams, any potential essential surface would have to be visible already in the base diagram (by the way the twists are added along a fixed pattern). This uses the same volume computation together with a direct check that no new incompressible surfaces are created when the parameter increases, thereby confirming hyperbolicity for all members without additional case analysis. revision: yes
-
Referee: [§4.1, Proposition 4.2] non-braid-positivity is established via a signature obstruction that works for the first ten members but is asserted to hold for the whole family without a uniform lower bound on the braid index or a general monodromy argument; this needs a single proof that scales with the parameter.
Authors: The signature formula for the family is explicit and linear in the parameter. We will add a short paragraph deriving a uniform lower bound: the signature grows at least linearly while any positive braid representation on b strands with the observed crossing number is bounded above by a linear function of b; choosing the parameter large enough forces the signature to exceed every possible bound, independent of b. This single scaling argument replaces the finite check and will be included in the revised Proposition 4.2. revision: yes
Circularity Check
New explicit construction with no reduction to inputs or self-citations
full rationale
The paper advances a direct construction of an infinite family of hyperbolic L-space knots shown to be non-braid-positive and distinct from Baker-Kegel examples. No derivation step equates a claimed prediction or first-principles result to a fitted parameter, self-defined quantity, or load-bearing self-citation whose validity is presupposed by the present work. The three required properties (L-space surgery, hyperbolicity, non-braid-positivity) are asserted to follow from the explicit diagrams and invariants supplied by the construction itself rather than from any renaming, ansatz smuggling, or uniqueness theorem imported from the authors' prior work. This is the standard non-circular pattern for a construction paper whose central claim is the existence of new examples.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Chris Anderson, Kenneth Baker, Xinghua Gao, Marc Kegel, Khanh Le, Kyle Miller, Sinem Onaran, Geoffrey Sangston, Samuel Tripp, Adam Wood, Ana Wright, L–space knots with tunnel number > 1 by experiment, Exp. Math. 32 (2023), no. 4, 600–614
work page 2023
-
[2]
Kenneth Baker and Marc Kegel, Census L–space knots are braid positive, except for one that is not , Algebr. Geom. Topol. 24 (2024), no.1, 569–586
work page 2024
-
[3]
Mladen Bestvina and Michael Handel, Train-tracks for surface homeomorphisms, Topology 34 (1995), no. 1, 109–140. 20 KEISUKE HIMENO Figure 25. Continued from Figure 24. Here, the deformation from the right bottom in Figure 24 to the bottom of this figure is by an isotopy
work page 1995
-
[4]
James Van Buskirk, Positive knots have positive Conway polynomials , Knot theory and manifolds (Vancouver, B.C., 1983), 146–159, Lecture Notes in Math., 1144, Springer–Verlag, Berlin, 1985
work page 1983
-
[5]
Eriko Hironaka and Eiko Kin, A family of pseudo-Anosov braids with small dilatation , Algebr. Geom. Topol. 6 (2006), 699–738
work page 2006
-
[6]
Jennifer Hom, Robert Lipschitz and Daniel Ruberman, Thirty yeas of Floer theory for 3–manifolds, 2017, https://www.birs.ca/cmo-workshops/2017/17w5011/report17w5011.pdf
work page 2017
-
[7]
Ahmad Issa, The classification of quasi-alternating Montesinos links , Proc. Amer. Math. Soc. 146 (2018), no. 9, 4047–4057. NON–BRAID POSITIVE HYPERBOLIC L–SPACE KNOTS 21 Figure 26. (Top) The braid XnβnX −1 n . (Middle) The braid ob- tained by rewriting the braid ∆ −4XnβnX −1 n , where ∆ is the Gar- side fundamental 2 n–braid. Here the box with −2 indicat...
work page 2018
-
[8]
Tetsuya Ito, Braid ordering and the geometry of closed braid , Geom. Topol. 15 (2011), no. 1, 473–498
work page 2011
-
[9]
Tetsuya Ito, An obstruction of Gordian distance one and cosmetic crossings for genus one knots, New York J. Math. 28 (2022), 175–181
work page 2022
-
[10]
Tetsuya Ito, A note on HOMFLY polynomial of positive braid links , Internat. J. Math. 33 (2022), no. 4, Paper No. 2250031, 18 pp
work page 2022
-
[11]
Paolo Lisca and Gordana Mati´ c,Transverse contact structures on Seifert 3–manifolds, Al- gebr. Geom. Topol. 4 (2004), 1125–1144
work page 2004
-
[12]
Paolo Lisca and Andr´ as Stipsicz,Ozsv´ ath–Szab´ o invariants and tight contact3–manifolds. III, J. Symplectic Geom. 5 (2007), no. 4, 357–384
work page 2007
-
[13]
Jos´ e M. Montesinos,Surgery on links and double branched covers of S3, in Knots, groups, and 3–manifolds (Papers dedicated to the memory of R. H. Fox), pp. 227–259 (Ann. of Math. Studies, No. 84, Princeton University Press, Princeton, N.J., 1975.)
work page 1975
-
[14]
Yi Ni, Knot Floer homology detects fibred knots , Invent. Math. 170 (2007), no. 3, 577–608
work page 2007
-
[15]
Peter Ozsv´ ath and Zolt´ an Szab´ o,On knot Floer homology and lens space surgeries, Topology 44 (2005), no.6, 1281–1300
work page 2005
-
[16]
Peter Ozsv´ ath and Zolt´ an Szab´ o,On the Heegaard Floer homology of branched double- covers, Adv. Math. 194 (2005), no. 1, 1–33
work page 2005
-
[17]
Lee Rudolph, Quasipositivity and new knot invariants , Rev. Mat. Univ. Complut. Madrid 2 (1989), no. 1, 85–109. 22 KEISUKE HIMENO
work page 1989
-
[18]
The Sage Developers, Sage math, the Sage Mathematics Software System (Version 10.3) , 2024, https://www.sagemath.org
work page 2024
-
[19]
Stallings, Constructions of fibred knots and links, Algebraic and geometric topology (Proc
John R. Stallings, Constructions of fibred knots and links, Algebraic and geometric topology (Proc. Sympos. Pure Math., Stanford Univ., Stanford, Calif., 1976), Part 2, pp. 55–60, Proc. Sympos. Pure Math., XXXII American Mathematical Society, Providence, RI, 1978
work page 1976
-
[20]
Hideo Takioka, 2 n–moves and the Γ–polynomial for knots, Kyungpook Math. J. 64 (2024), no. 3, 511–518
work page 2024
-
[21]
Masakazu Teragaito, Hyperbolic L–space knots and their formal semigroups , Internat. J. Math. 33 (2022), no.12, Paper No. 2250080, 20 pp. Graduate School of Advanced Science and Engineering, Hiroshima University, 1-3-1 Kagamiyama, Higashi-hiroshima, 7398526, Japan Email address: himeno-keisuke@hiroshima-u.ac.jp
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.