Data-Driven Incremental GAS Certificate of Nonlinear Homogeneous Networks: A Scenario Approach with Noisy Data
Pith reviewed 2026-05-19 03:12 UTC · model grok-4.3
The pith
A data-driven compositional method certifies incremental global asymptotic stability for unknown homogeneous networks using noisy data from subsystems alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
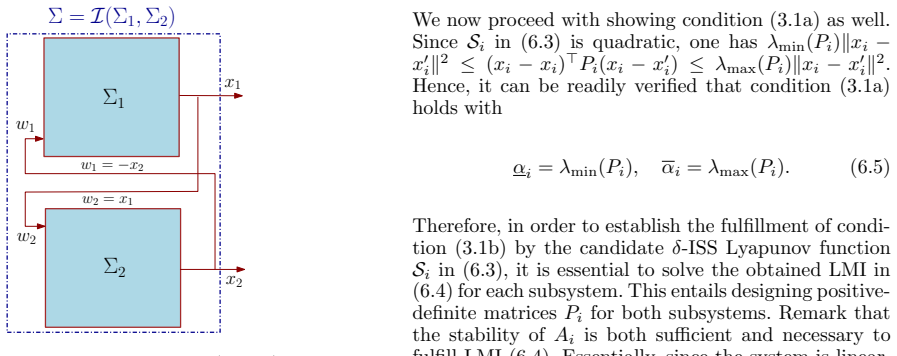
The central claim is that by solving an auxiliary scenario optimization program that accounts for bounded noise in one-step transition data, one can construct incremental input-to-state stability Lyapunov functions for each unknown subsystem, and then use a small-gain compositional condition to build an incremental Lyapunov function for the interconnected network, guaranteeing incremental global asymptotic stability with correctness guarantees that incorporate the noise bound.
What carries the argument
An auxiliary scenario optimization program that accommodates noisy measurements to construct incremental input-to-state stability Lyapunov functions for each subsystem.
If this is right
- If the approach is correct, networks with 10000 subsystems can be certified as incrementally globally asymptotically stable by gathering noisy data only from each subsystem separately.
- The sample complexity is reduced to the scale of individual subsystems rather than the full interconnected system.
- Correctness guarantees hold even with noisy data as long as the noise norm is bounded and known.
- Incremental Lyapunov functions for the network can be built from the data-driven subsystem certificates using small-gain conditions.
Where Pith is reading between the lines
- This could be extended to verify stability in networks with different interconnection structures by modifying the small-gain threshold.
- Applying the method to experimental data from physical systems would allow checking whether the predicted stability matches actual long-term behavior.
- Similar data-driven ideas might apply to proving other properties like safety in large-scale systems.
Load-bearing premise
The data from one-step transitions contain noise whose maximum size is known in advance.
What would settle it
A concrete falsifier would be finding a set of trajectories in the network where the differences between solutions do not approach zero as required by incremental global asymptotic stability, even though the data-driven certificates and small-gain condition were satisfied.
Figures



read the original abstract
This work focuses on a compositional data-driven approach to verify incremental global asymptotic stability (delta-GAS) over interconnected homogeneous networks of degree one with unknown mathematical dynamics. Our proposed approach leverages the concept of incremental input-to-state stability (delta-ISS) of subsystems, characterized by delta-ISS Lyapunov functions. To implement our data-driven scheme, we initially reframe the delta-ISS Lyapunov conditions as a robust optimization program (ROP). Due to the presence of unknown subsystem dynamics in the ROP constraints, we develop a scenario optimization program (SOP) by gathering data from trajectories of each unknown subsystem. However, since the measured one-step transition data are corrupted by noise with a known bound on its norm, rendering the proposed SOP intractable, we introduce an auxiliary SOP that explicitly accommodates noisy measurements. We solve the auxiliary SOP and construct a delta-ISS Lyapunov function for each subsystem with unknown dynamics. We then leverage a small-gain compositional condition to facilitate the construction of an incremental Lyapunov function for an unknown interconnected network based on the data-driven delta-ISS Lyapunov functions of its individual subsystems, while providing correctness guarantees, incorporating the bound on the noise norm. We demonstrate that our data-driven compositional approach reduces the sample complexity to the subsystem level. To validate the effectiveness of our approach, we apply it to an unknown controlled physical nonlinear homogeneous network of degree one, comprising 10000 subsystems. By gathering noisy data from each unknown subsystem, we demonstrate that the interconnected network is delta-GAS with a correctness guarantee.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a compositional data-driven certification method for incremental global asymptotic stability (delta-GAS) of unknown nonlinear homogeneous networks of degree one. Subsystem delta-ISS Lyapunov functions are obtained by recasting the Lyapunov conditions as a robust optimization program, then replacing it with a scenario optimization program (SOP) solved on noisy one-step transition data; an auxiliary SOP is introduced to handle the known noise-norm bound. A small-gain condition is then invoked to compose the subsystem certificates into a network-level incremental Lyapunov function, with the claim that sample complexity is thereby reduced to the per-subsystem level while retaining probabilistic correctness guarantees. The approach is illustrated on a 10000-subsystem controlled physical network.
Significance. If the probabilistic guarantees survive the network-level composition, the method would offer a scalable, model-free route to stability certification for large homogeneous networks, directly addressing the curse of dimensionality that plagues centralized data-driven approaches. The explicit incorporation of bounded noise into the auxiliary SOP and the use of small-gain theorems to preserve compositionality are technically attractive features that could be extended to other incremental properties.
major comments (1)
- [network-level correctness guarantees / 10000-subsystem example] § on network-level correctness guarantees and the 10000-subsystem numerical example: the claimed network-level correctness guarantee is stated without an explicit union-bound adjustment. Because the 10000 subsystem certificates are obtained independently, the joint probability that all certificates are valid is at most (1−ε)^10000 for per-subsystem violation level ε. Achieving an overall success probability of, say, 0.99 therefore requires ε ≪ 10^{-4}, which inflates the required number of samples per subsystem according to the standard scenario bound. The abstract and numerical section give no indication that this tightening was performed; consequently the stated sample-complexity reduction to the subsystem level does not yet hold for a simultaneous network guarantee.
minor comments (2)
- [auxiliary SOP construction] The transition from the robust optimization program to the auxiliary SOP that accommodates the noise bound should be accompanied by a short derivation showing that feasibility of the auxiliary program implies feasibility of the original robust program (or the appropriate probabilistic relaxation).
- [notation] Notation for the noise-norm bound and the scenario violation level should be introduced once and used consistently; several symbols appear to be overloaded between the per-subsystem and network sections.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on the manuscript. We address the major comment point by point below.
read point-by-point responses
-
Referee: § on network-level correctness guarantees and the 10000-subsystem numerical example: the claimed network-level correctness guarantee is stated without an explicit union-bound adjustment. Because the 10000 subsystem certificates are obtained independently, the joint probability that all certificates are valid is at most (1−ε)^10000 for per-subsystem violation level ε. Achieving an overall success probability of, say, 0.99 therefore requires ε ≪ 10^{-4}, which inflates the required number of samples per subsystem according to the standard scenario bound. The abstract and numerical section give no indication that this tightening was performed; consequently the stated sample-complexity reduction to the subsystem level does not yet hold for a simultaneous network guarantee.
Authors: We agree with the referee that an explicit union-bound adjustment is required to obtain a rigorous simultaneous network-level correctness guarantee. The original manuscript derives per-subsystem probabilistic certificates via scenario optimization and composes them using the small-gain condition, but does not adjust the per-subsystem violation probability ε to account for the 10000 independent certificates. In the revised manuscript we will (i) set the per-subsystem ε to δ/N with N = 10000 and desired overall success probability 1−δ, (ii) update the sample-complexity expressions accordingly using the standard scenario bound, and (iii) revise the abstract and the numerical-example section to state the tightened per-subsystem requirements explicitly. We will also note that the resulting sample complexity still scales only logarithmically with network size and remains far smaller than that of any centralized approach. revision: yes
Circularity Check
No circularity: data-driven certificates built from external noisy trajectories via standard scenario optimization and small-gain composition
full rationale
The derivation begins with external one-step transition data collected from each subsystem under bounded noise, reframes the delta-ISS Lyapunov inequalities as a robust optimization program, relaxes it to an auxiliary scenario program whose solution yields a certificate with explicit probabilistic guarantees, and finally invokes the classical small-gain theorem to compose the per-subsystem certificates into a network-level incremental Lyapunov function. None of these steps defines the target stability property in terms of itself, renames a fitted quantity as a prediction, or relies on a load-bearing self-citation whose validity is presupposed by the present work. The sample-complexity reduction to the subsystem level follows directly from treating the subsystems independently and applying the small-gain condition; any statistical tightening required by a union bound over 10000 subsystems is a separate question of guarantee strength, not a circular reduction of the claimed derivation to its inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- noise bound
axioms (2)
- standard math Small-gain theorem applies to compose subsystem delta-ISS Lyapunov functions into a network incremental Lyapunov function
- domain assumption Subsystems admit delta-ISS Lyapunov functions that can be recovered from noisy one-step data via the auxiliary SOP
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
reframe the δ-ISS Lyapunov conditions as a robust optimization program (ROP)... develop a scenario optimization program (SOP) by gathering data... auxiliary SOP that explicitly accommodates noisy measurements
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
leverage a small-gain compositional condition to facilitate the construction of an incremental Lyapunov function
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Angeli, D. (2002), ‘A Lyapunov approach to incremental stability properties’,IEEE Transactions on Automatic Control 47(3), 410–421. Bhatia, R. & Davis, C. (1995), ‘A cauchy-schwarz in- equality for operators with applications’, Linear alge- bra and its applications 223, 119–129. Biemond, J. J. B., Postoyan, R., Heemels, W. P. M. H. & Van De Wouw, N. (2018...
work page 2002
-
[2]
N., Mahmood, Z., Li, Y., Sredojevic, R., Megretski, A., Stojanovi, V., Avniel, Y
Bond, B. N., Mahmood, Z., Li, Y., Sredojevic, R., Megretski, A., Stojanovi, V., Avniel, Y. & Daniel, L. (2010), ‘Compact modeling of nonlinear analog circuits using system identification via semidefinite programming and incremental stability certification’, IEEE Transactions on Computer-Aided Design of In- tegrated Circuits and Systems 29(8), 1149–1162. C...
-
[3]
Lavaei, A. & Angeli, D. (2023), ‘Data-driven stability certificate of interconnected homogeneous networks via ISS properties’, IEEE Control Systems Letters 7, 2395–2400. Lavaei, A., Mohajerin Esfahani, P. & Zamani, M. (2022), Data-driven stability verification of homoge- neous nonlinear systems with unknown dynamics, in ‘Proceedings of the 61st Conference...
-
[4]
- arXiv: 2412.03901’. Zaker, M., Nejati, A. & Lavaei, A. (2025), From data to global asymptotic stability of unknown large-scale networks with provable guarantees, in ‘Proceedings of the 28th ACM International Conference on Hybrid Systems: Computation and Control’, pp. 1–14. Zhou, R., Quartz, T., De Sterck, H. & Liu, J. (2022), ‘Neural Lyapunov control of...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.