Millimeter-Wave Position Sensing Using Reconfigurable Intelligent Surfaces: Positioning Error Bound and Phase Shift Configuration
Pith reviewed 2026-05-19 00:06 UTC · model grok-4.3
The pith
Multiple reconfigurable intelligent surfaces can minimize the positioning error bound in 3D mmWave MISO systems by optimizing their phase shifts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
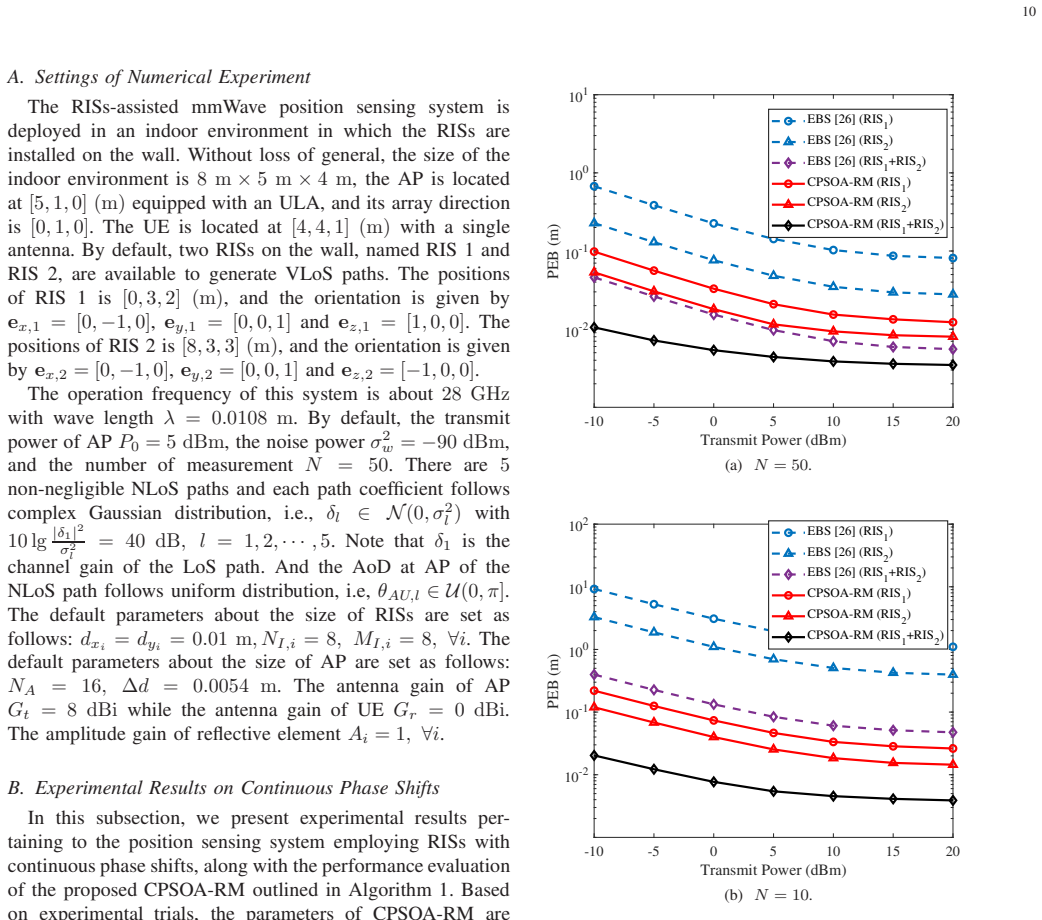
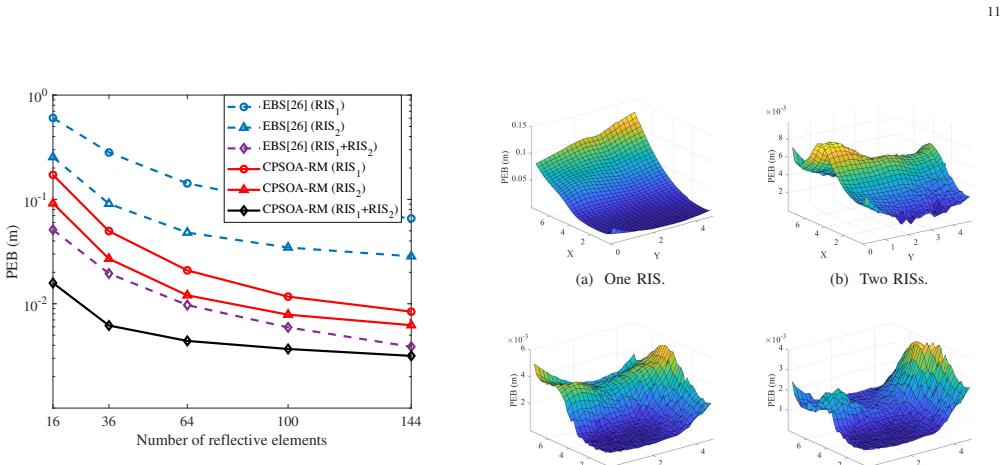
In a 3D multi-input single-output mmWave positioning system assisted by multiple RISs, the positioning error bound is minimized through optimized phase shift configurations. The framework uses sequential RIS activation and directional beamforming to exploit virtual line-of-sight paths. The theoretical limits are analyzed via Fisher information derivation, leading to a positioning error bound. For continuous phase shifts, a Riemannian manifold-based optimization algorithm is used, while for discrete phase shifts, a heuristic method based on the grey wolf optimizer is proposed. Simulations validate the reduction in the positioning error bound with these approaches.
What carries the argument
The positioning error bound (PEB) derived from the Fisher information matrix, which is minimized by optimizing the phase shifts of the multiple RISs using Riemannian manifold optimization for continuous cases and grey wolf optimizer for discrete cases.
If this is right
- Using multiple RISs with optimized phases leads to a lower PEB compared to systems with fewer surfaces.
- Continuous phase shift optimization via Riemannian manifold methods achieves superior performance in reducing positioning errors.
- Discrete phase shifts can still be effectively configured using the grey wolf optimizer heuristic to approach the performance of continuous shifts.
- Sequential activation and beamforming allow full exploitation of virtual LoS paths for enhanced information gathering.
- Overall, the proposed methods improve positioning accuracy as shown in numerical simulations.
Where Pith is reading between the lines
- Practical systems might benefit from adapting the phase configurations dynamically as the target moves.
- Combining this positioning technique with data communication could enable integrated sensing and communication in mmWave bands.
- Testing the approach in environments with physical blockages would confirm the advantages of virtual paths created by RISs.
Load-bearing premise
The derivations and optimizations assume perfect phase control at each RIS element and complete knowledge of the channels without impairments such as phase noise or synchronization errors.
What would settle it
A real-world experiment or detailed simulation that includes phase noise and channel estimation errors, showing that the achieved positioning error does not approach the derived bound, would falsify the effectiveness of the optimization under ideal assumptions.
Figures


read the original abstract
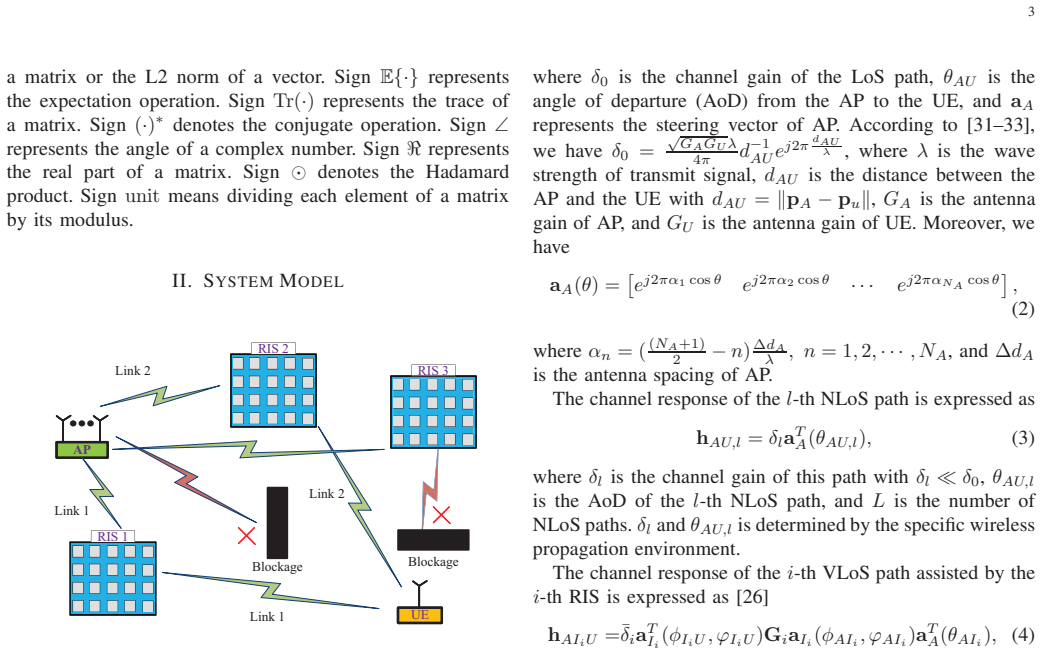
Millimeter-wave (mmWave) positioning has emerged as a promising technology for next-generation intelligent systems. The advent of reconfigurable intelligent surfaces (RISs) has revolutionized high-precision mmWave localization by enabling dynamic manipulation of wireless propagation environments. This paper investigates a three-dimensional (3D) multi-input single-output (MISO) mmWave positioning system assisted by multiple RISs. We introduce a measurement framework incorporating sequential RIS activation and directional beamforming to fully exploit virtual line-of-sight (VLoS) paths. The theoretical performance limits are rigorously analyzed through derivation of the Fisher information and subsequent positioning error bound (PEB). To minimize the PEB, two distinct optimization approaches are proposed for continuous and discrete phase shift configurations of RISs. For continuous phase shifts, a Riemannian manifold-based optimization algorithm is proposed. For discrete phase shifts, a heuristic algorithm incorporating the grey wolf optimizer is proposed. Extensive numerical simulations demonstrate the effectiveness of the proposed algorithms in reducing the PEB and validate the improvement in positioning accuracy achieved by multiple RISs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript analyzes a 3D mmWave MISO positioning system assisted by multiple RISs. It derives the Fisher information matrix and positioning error bound (PEB) from a measurement model incorporating sequential RIS activation, directional beamforming, and virtual line-of-sight paths. Two phase-shift optimization algorithms are proposed to minimize the PEB: a Riemannian manifold method for continuous phases and a grey-wolf-optimizer heuristic for discrete phases. Numerical simulations are presented to show PEB reduction with the optimized configurations and with multiple RISs.
Significance. If the derivations and simulations hold, the work supplies useful theoretical performance limits and concrete optimization procedures for RIS-aided mmWave localization. The explicit treatment of both continuous and discrete phase constraints, together with the multi-RIS VLoS framework, strengthens the practical relevance for high-accuracy 3D positioning in future wireless systems.
major comments (1)
- [Phase shift configuration and optimization] Phase-shift optimization sections: the FIM (and therefore the PEB) entries depend on geometry-dependent quantities evaluated at the unknown true position (angles of arrival, path lengths, array response vectors). The proposed Riemannian and grey-wolf algorithms therefore require knowledge of the very location being estimated. No robust formulation over a position uncertainty region, no iterative refinement procedure, and no discussion of how the optimization would be performed in a blind or semi-blind setting are provided. This dependency directly affects the central claim that the optimizations minimize the PEB for the positioning task.
minor comments (2)
- [System model and assumptions] The measurement model and FIM derivation assume ideal phase control, perfect synchronization, and error-free channel knowledge. While acceptable for a theoretical bound, a brief sensitivity analysis or remark on the impact of phase noise or estimation errors would strengthen the practical interpretation.
- [Measurement framework] Notation for the array response vectors and the sequential activation schedule could be clarified with an explicit table or diagram showing the time-slot indexing and the corresponding RIS states.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive overall assessment of the manuscript. We address the single major comment below and will revise the paper to incorporate additional discussion on practical implementation.
read point-by-point responses
-
Referee: [Phase shift configuration and optimization] Phase-shift optimization sections: the FIM (and therefore the PEB) entries depend on geometry-dependent quantities evaluated at the unknown true position (angles of arrival, path lengths, array response vectors). The proposed Riemannian and grey-wolf algorithms therefore require knowledge of the very location being estimated. No robust formulation over a position uncertainty region, no iterative refinement procedure, and no discussion of how the optimization would be performed in a blind or semi-blind setting are provided. This dependency directly affects the central claim that the optimizations minimize the PEB for the positioning task.
Authors: We thank the referee for highlighting this important practical consideration. The FIM and PEB are indeed functions of the unknown position, and our Riemannian and grey-wolf algorithms minimize the PEB for a given geometry, which is the standard approach when deriving theoretical performance limits and optimal configurations in the localization literature. This provides the fundamental bound and the configuration that achieves it when the position (or a sufficiently accurate estimate) is available for design purposes. We acknowledge that the manuscript does not explicitly discuss blind or semi-blind operation. In the revised version we will add a dedicated subsection on practical deployment, outlining an iterative refinement procedure: obtain a coarse initial position estimate via a preliminary non-optimized measurement, optimize the RIS phases based on this estimate, refine the position, and iterate. We will also briefly note the possibility of robust optimization over a position uncertainty region, while observing that the added complexity may be explored in future work. These clarifications will strengthen the connection between the theoretical optimizations and realistic positioning tasks without changing the core derivations or claims. revision: yes
Circularity Check
Standard FIM-to-PEB derivation with position-dependent optimization; no reduction to inputs by construction
full rationale
The paper derives the positioning error bound directly from the Fisher information matrix constructed from the mmWave MISO measurement model incorporating sequential RIS activation and VLoS paths. This follows the conventional CRLB approach without self-referential definitions, fitted parameters renamed as predictions, or load-bearing self-citations. Phase-shift optimization (Riemannian manifold for continuous, grey-wolf heuristic for discrete) is performed on the explicit PEB expression; while the FIM terms are geometry-dependent, the paper presents the minimization as a theoretical exercise rather than claiming a closed-loop self-consistent procedure that reduces to its own fitted values. No ansatz smuggling or uniqueness theorems imported from prior author work appear in the derivation chain. The overall analysis remains self-contained against the signal model and standard information-theoretic bounds.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The wireless channel follows standard mmWave propagation models with line-of-sight and virtual line-of-sight paths.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We derive the CRLB and the subsequent positioning error bound (PEB) ... two distinct optimization approaches ... Riemannian manifold-based ... grey wolf optimizer
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
FpU = R Fξξξ R^T ... LR = sqrt(Tr{FpU^{-1}})
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
The integrated sensing and communication revolution for 6 G: Vision, techniques, and applications,
N. Gonz´ alez-Prelcic, M. F. Keskin, O. Kaltiokallio, M. V alkama, D. Dardari, X. Shen, Y . Shen, M. Bayraktar, and H. Wymeersch, “The integrated sensing and communication revolution for 6 G: Vision, techniques, and applications,” Proceedings of the IEEE , vol. 112, no. 7, pp. 676–723, 2024
work page 2024
-
[2]
A tutorial on terahertz-ba nd localization for 6G communication systems,
H. Chen, H. Sarieddeen, T. Ballal, H. Wymeersch, M.-S. Alouini, and T. Y . Al-Naffouri, “A tutorial on terahertz-ba nd localization for 6G communication systems,” IEEE Communi- cations Surveys & Tutorials , vol. 24, no. 3, pp. 1780–1815, 2022
work page 2022
-
[3]
mmWaves RSSI indoor network localization,
M. V ari and D. Cassioli, “mmWaves RSSI indoor network localization,” in 2014 IEEE International Conference on Com- munications W orkshops (ICC). IEEE, 2014, pp. 127–132
work page 2014
-
[4]
Low-rank tensor decomposition-aided channel estimation for millimeter wave MIMO-OFDM systems,
Z. Zhou, J. Fang, L. Yang, H. Li, Z. Chen, and R. S. Blum, “Low-rank tensor decomposition-aided channel estimation for millimeter wave MIMO-OFDM systems,” IEEE Journal on Selected Areas in Communications , vol. 35, no. 7, pp. 1524– 1538, 2017
work page 2017
-
[5]
3-D indoor positio ning for millimeter-wave massive MIMO systems,
Z. Lin, T. Lv, and P . T. Mathiopoulos, “3-D indoor positio ning for millimeter-wave massive MIMO systems,” IEEE Transac- tions on Communications , vol. 66, no. 6, pp. 2472–2486, 2018
work page 2018
-
[6]
5G posi - tioning and mapping with diffuse multipath,
F. Wen, J. Kulmer, K. Witrisal, and H. Wymeersch, “5G posi - tioning and mapping with diffuse multipath,” IEEE Transactions on Wireless Communications , vol. 20, no. 2, pp. 1164–1174, 2020. 16 36 64 100 144 Number of reflective elements 10-2 10-1 100 101 PEB (m) Discrete EBS (RIS1) Discrete EBS (RIS2) Discrete EBS (RIS1+RIS2) DPSOA-I-GWO (RIS1) DPSOA-I-GW...
work page 2020
-
[7]
Position and orientation estimation thr ough 13 millimeter-wave MIMO in 5G systems,
A. Shahmansoori, G. E. Garcia, G. Destino, G. Seco-Grana dos, and H. Wymeersch, “Position and orientation estimation thr ough 13 millimeter-wave MIMO in 5G systems,” IEEE Transactions on Wireless Communications, vol. 17, no. 3, pp. 1822–1835, 2017
work page 2017
-
[8]
Successive localization and beamforming in 5G mmWave MIMO communication systems,
B. Zhou, A. Liu, and V . Lau, “Successive localization and beamforming in 5G mmWave MIMO communication systems,” IEEE Transactions on Signal Processing , vol. 67, no. 6, pp. 1620–1635, 2019
work page 2019
-
[9]
Distributed localization of a RF target in NLOS environmen ts,
W. Xu, F. Quitin, M. Leng, W. P . Tay, and S. G. Razul, “Distributed localization of a RF target in NLOS environmen ts,” IEEE Journal on Selected Areas in Communications , vol. 33, no. 7, pp. 1317–1330, 2015
work page 2015
-
[10]
Coding metamaterials, digital metamaterials and programmable me ta- materials,
T. J. Cui, M. Q. Qi, X. Wan, J. Zhao, and Q. Cheng, “Coding metamaterials, digital metamaterials and programmable me ta- materials,” Light: science & applications , vol. 3, no. 10, pp. e218–e218, 2014
work page 2014
-
[11]
Q. Wu and R. Zhang, “Towards smart and reconfigurable env i- ronment: Intelligent reflecting surface aided wireless net work,” IEEE communications magazine , vol. 58, no. 1, pp. 106–112, 2019
work page 2019
-
[12]
F. Shu, L. Yang, X. Jiang, W. Cai, W. Shi, M. Huang, J. Wang , and X. Y ou, “Beamforming and transmit power design for intel - ligent reconfigurable surface-aided secure spatial modula tion,” IEEE Journal of Selected Topics in Signal Processing , vol. 16, no. 5, pp. 933–949, 2022
work page 2022
-
[13]
Intelligen t reflecting surface (IRS)-aided covert wireless communicat ions with delay constraint,
X. Zhou, S. Yan, Q. Wu, F. Shu, and D. W. K. Ng, “Intelligen t reflecting surface (IRS)-aided covert wireless communicat ions with delay constraint,” IEEE Transactions on Wireless Commu- nications, vol. 21, no. 1, pp. 532–547, 2022
work page 2022
-
[14]
Active reconfigura ble intelligent surface for energy efficiency in MU-MISO system s,
Y . Ma, M. Li, Y . Liu, Q. Wu, and Q. Liu, “Active reconfigura ble intelligent surface for energy efficiency in MU-MISO system s,” IEEE Transactions on V ehicular Technology, vol. 72, no. 3, pp. 4103–4107, 2023
work page 2023
-
[15]
H. Wymeersch, J. He, B. Denis, A. Clemente, and M. Juntti , “Radio localization and mapping with reconfigurable intell igent surfaces: Challenges, opportunities, and research direct ions,” IEEE V ehicular Technology Magazine, vol. 15, no. 4, pp. 52–61, 2020
work page 2020
-
[16]
Beyond 5G wireless localiza - tion with reconfigurable intelligent surfaces,
H. Wymeersch and B. Denis, “Beyond 5G wireless localiza - tion with reconfigurable intelligent surfaces,” in ICC 2020 - 2020 IEEE International Conference on Communications (ICC ), 2020, pp. 1–6
work page 2020
-
[17]
Adaptive beamforming design for mmwave RIS-aided joint localization and communication,
J. He, H. Wymeersch, T. Sanguanpuak, O. Silven, and M. Ju ntti, “Adaptive beamforming design for mmwave RIS-aided joint localization and communication,” in 2020 IEEE Wireless Com- munications and Networking Conference W orkshops (WCNCW), 2020, pp. 1–6
work page 2020
-
[18]
SISO RIS-enabled joint 3D downlink local- ization and synchronization,
K. Keykhosravi, M. F. Keskin, G. Seco-Granados, and H. Wymeersch, “SISO RIS-enabled joint 3D downlink local- ization and synchronization,” in ICC 2021-IEEE International Conference on Communications . IEEE, 2021, pp. 1–6
work page 2021
-
[19]
Single- antenna sensor localization with reconfigurable intellige nt sur- faces,
Z. Ye, F. Junaid, R. Nilsson, and J. V an De Beek, “Single- antenna sensor localization with reconfigurable intellige nt sur- faces,” in GLOBECOM 2022-2022 IEEE Global Communica- tions Conference. IEEE, 2022, pp. 6200–6205
work page 2022
-
[20]
P . Gao, L. Lian, and J. Y u, “Wireless area positioning in RIS- assisted mmWave systems: Joint passive and active beamform - ing design,” IEEE Signal Processing Letters , vol. 29, pp. 1372– 1376, 2022
work page 2022
-
[21]
Re config- urable intelligent surfaces for localization: Position an d orien- tation error bounds,
A. Elzanaty, A. Guerra, F. Guidi, and M.-S. Alouini, “Re config- urable intelligent surfaces for localization: Position an d orien- tation error bounds,” IEEE Transactions on Signal Processing , vol. 69, pp. 5386–5402, 2021
work page 2021
-
[22]
CRB minimization for RIS-aided mmwave integrated sensing and communications,
W. Lyu, S. Yang, Y . Xiu, Y . Li, H. He, C. Y uen, and Z. Zhang, “CRB minimization for RIS-aided mmwave integrated sensing and communications,” IEEE Internet of Things Journal , vol. 11, no. 10, pp. 18 381–18 393, 2024
work page 2024
-
[23]
Dual-RIS assisted 3D positioning and beam- forming design in ISAC system,
D. Ma, Z. Bai, J. Zhao, H. Xu, Z. Liu, D. Zhou, M. Jiang, and K. S. Kwak, “Dual-RIS assisted 3D positioning and beam- forming design in ISAC system,” in 2024 26th International Conference on Advanced Communications Technology (ICACT). IEEE, 2024, pp. 187–192
work page 2024
-
[24]
Channel estima tion and user localization for IRS-assisted MIMO-OFDM systems,
Y . Lin, S. Jin, M. Matthaiou, and X. Y ou, “Channel estima tion and user localization for IRS-assisted MIMO-OFDM systems, ” IEEE Transactions on Wireless Communications , vol. 21, no. 4, pp. 2320–2335, 2021
work page 2021
-
[25]
Enhanced far-field l ocal- ization scheme using multi-RIS and efficient beam sweeping
A. K. Alhafid, S. Y ounis, and Y . Ali, “Enhanced far-field l ocal- ization scheme using multi-RIS and efficient beam sweeping. ” Progress in Electromagnetics Research C , vol. 140, 2024
work page 2024
-
[26]
W. Wang and W. Zhang, “Joint beam training and positioni ng for intelligent reflecting surfaces assisted millimeter wa ve com- munications,” IEEE Transactions on Wireless Communications , vol. 20, no. 10, pp. 6282–6297, 2021
work page 2021
-
[27]
Approximate maximum- likelihood RIS-aided positioning,
W. Zhang, Z. Wang, and W. P . Tay, “Approximate maximum- likelihood RIS-aided positioning,” IEEE Transactions on Wire- less Communications , vol. 22, no. 12, pp. 8859–8875, 2023
work page 2023
-
[28]
Multi-RIS-enabled 3D sidelink positioning ,
H. Chen, P . Zheng, M. F. Keskin, T. Al-Naffouri, and H. Wymeersch, “Multi-RIS-enabled 3D sidelink positioning ,” IEEE Transactions on Wireless Communications , vol. 23, no. 8, pp. 8700–8716, 2024
work page 2024
-
[29]
Cram´ er-Rao lower bound analysis of multiple-RIS-aided mmwave positioning systems,
Y . Liu, S. Hong, C. Pan, Y . Wang, Y . Pan, and M. Chen, “Cram´ er-Rao lower bound analysis of multiple-RIS-aided mmwave positioning systems,” in 2022 IEEE 33rd Annual International Symposium on Personal, Indoor and Mobile Rad io Communications (PIMRC) . IEEE, 2022, pp. 1110–1115
work page 2022
-
[30]
Optimal spatial signal design for mmWave po- sitioning under imperfect synchronization,
M. F. Keskin, F. Jiang, F. Munier, G. Seco-Granados, and H. Wymeersch, “Optimal spatial signal design for mmWave po- sitioning under imperfect synchronization,” IEEE Transactions on V ehicular Technology, vol. 71, no. 5, pp. 5558–5563, 2022
work page 2022
-
[31]
W. Tang, X. Chen, M. Z. Chen, J. Y . Dai, Y . Han, M. Di Renzo, S. Jin, Q. Cheng, and T. J. Cui, “Path loss modeling and measurements for reconfigurable intelligent surfaces in th e millimeter-wave frequency band,” IEEE Transactions on Com- munications, vol. 70, no. 9, pp. 6259–6276, 2022
work page 2022
-
[32]
W. Tang, M. Z. Chen, X. Chen, J. Y . Dai, Y . Han, M. Di Renzo, Y . Zeng, S. Jin, Q. Cheng, and T. J. Cui, “Wireless communica- tions with reconfigurable intelligent surface: Path loss mo deling and experimental measurement,” IEEE transactions on wireless communications, vol. 20, no. 1, pp. 421–439, 2020
work page 2020
-
[33]
X. Cheng, Y . Lin, W. Shi, J. Li, C. Pan, F. Shu, Y . Wu, and J. Wang, “Joint optimization for RIS-assisted wireless com - munications: From physical and electromagnetic perspecti ves,” IEEE Transactions on Communications , vol. 70, no. 1, pp. 606– 620, 2021
work page 2021
-
[34]
Integrated sensi ng and communication based on space-time-coding metasurface s,
X. Q. Chen, L. Zhang, Y . N. Zheng, S. Liu, Z. R. Huang, J. C. Liang, M. Di Renzo, V . Galdi, and T. J. Cui, “Integrated sensi ng and communication based on space-time-coding metasurface s,” Nature Communications, vol. 16, no. 1, p. 1836, 2025
work page 2025
-
[35]
B. Di, H. Zhang, L. Song, Y . Li, Z. Han, and H. V . Poor, “Hyb rid beamforming for reconfigurable intelligent surface based m ulti- user communications: Achievable rates with limited discre te phase shifts,” IEEE Journal on Selected Areas in Communi- cations, vol. 38, no. 8, pp. 1809–1822, 2020
work page 2020
-
[36]
S. M. Kay, Fundamentals of statistical signal processing: esti- mation theory . Prentice-Hall, Inc., 1993
work page 1993
-
[37]
Ucinski, Optimal measurement methods for distributed pa- rameter system identification
D. Ucinski, Optimal measurement methods for distributed pa- rameter system identification . CRC press, 2004
work page 2004
-
[38]
Optimizatio n al- gorithms on matrix manifolds,
P .-A. Absil, R. Mahony, and R. Sepulchre, “Optimizatio n al- gorithms on matrix manifolds,” in Optimization Algorithms on Matrix Manifolds . Princeton University Press, 2009
work page 2009
-
[39]
Resource allocation for secure IRS-assisted multiuser MISO systems ,
D. Xu, X. Y u, Y . Sun, D. W. K. Ng, and R. Schober, “Resource allocation for secure IRS-assisted multiuser MISO systems ,” in 2019 IEEE Globecom W orkshops (GC Wkshps) . IEEE, 2019, pp. 1–6
work page 2019
-
[40]
Avriel, Nonlinear programming: analysis and methods
M. Avriel, Nonlinear programming: analysis and methods . Courier Corporation, 2003
work page 2003
-
[41]
A n im- proved grey wolf optimizer for solving engineering problem s,
M. H. Nadimi-Shahraki, S. Taghian, and S. Mirjalili, “A n im- proved grey wolf optimizer for solving engineering problem s,” Expert Systems with Applications , vol. 166, pp. 113 917.1– 113 917.25, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.