Driving Style Recognition Like an Expert Using Semantic Privileged Information from Large Language Models
Pith reviewed 2026-05-18 22:28 UTC · model grok-4.3
The pith
Incorporating LLM-generated semantic descriptions as privileged information during training improves driving style recognition to better align with human expert judgments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By using semantic privileged information from large language models in the training phase of SVM+, the framework enables driving style classifiers to approximate the semantic reasoning of human experts, leading to higher accuracy on sensor-based inference without added runtime cost.
What carries the argument
Semantic Privileged Information (SPI) from LLM-generated natural language descriptions of driving behaviors, integrated into SVM+ training.
If this is right
- Improved F1 scores of 7.6% in car-following and 7.9% in lane-changing scenarios compared to conventional methods.
- The model maintains efficiency by using only sensor data during inference.
- Enhances alignment between algorithmic classifications and expert judgments.
- Supports more interpretable human-centric autonomous driving systems.
Where Pith is reading between the lines
- This method could extend to other areas of autonomous systems where high-level semantic knowledge from experts is available only at training time.
- Similar privileged information techniques might help bridge gaps in other machine learning applications involving human-like reasoning.
- Testing with varied LLMs could reveal how description quality affects the final recognition performance.
Load-bearing premise
The LLM-generated descriptions faithfully represent the semantic reasoning patterns of human driving experts without hallucinations or biases.
What would settle it
Collecting ratings from human driving experts on classifications from both the SPI model and a baseline model across the same set of driving scenarios to check for closer alignment with the SPI version.
Figures







read the original abstract
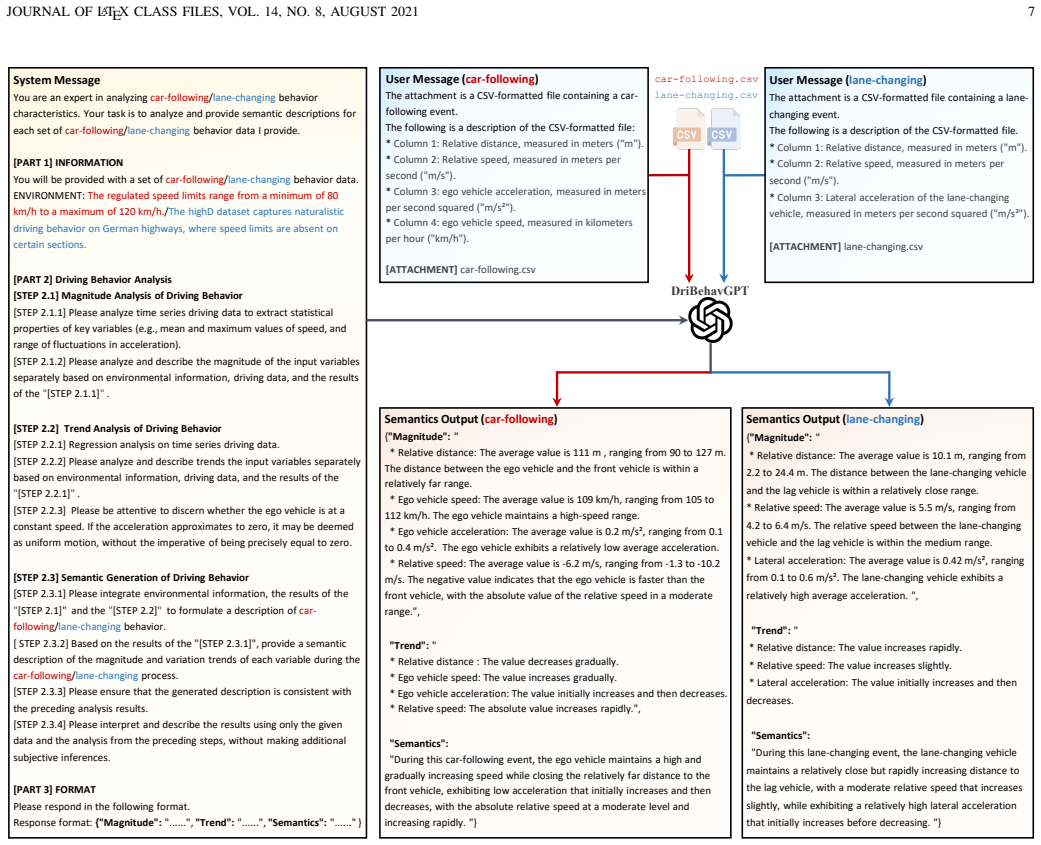
Existing driving style recognition systems largely depend on low-level sensor-derived features for training, neglecting the rich semantic reasoning capability inherent to human experts. This discrepancy results in a fundamental misalignment between algorithmic classifications and expert judgments. To bridge this gap, we propose a novel framework that integrates Semantic Privileged Information (SPI) derived from large language models (LLMs) to align recognition outcomes with human-interpretable reasoning. First, we introduce DriBehavGPT, an interactive LLM-based module that generates natural-language descriptions of driving behaviors. These descriptions are then encoded into machine learning-compatible representations via text embedding and dimensionality reduction. Finally, we incorporate them as privileged information into Support Vector Machine Plus (SVM+) for training, enabling the model to approximate human-like interpretation patterns. Experiments across diverse real-world driving scenarios demonstrate that our SPI-enhanced framework outperforms conventional methods, achieving F1-score improvements of 7.6% (car-following) and 7.9% (lane-changing). Importantly, SPI is exclusively used during training, while inference relies solely on sensor data, ensuring computational efficiency without sacrificing performance. These results highlight the pivotal role of semantic behavioral representations in improving recognition accuracy while advancing interpretable, human-centric driving systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a framework for driving style recognition that uses an LLM-based module (DriBehavGPT) to generate natural-language descriptions of driving behaviors as Semantic Privileged Information (SPI). These descriptions are encoded via text embedding and dimensionality reduction, then incorporated into SVM+ training to align classifications with human expert semantic reasoning. SPI is used only during training; inference relies solely on sensor data. Experiments on real-world car-following and lane-changing scenarios report F1-score gains of 7.6% and 7.9% over conventional methods.
Significance. If the central assumption holds, the work could meaningfully advance human-centric autonomous driving by injecting high-level semantic knowledge into standard ML pipelines without runtime cost. The training-only use of SPI is a practical design choice that supports efficient deployment.
major comments (2)
- [Abstract and Method] Abstract and § on DriBehavGPT: The performance improvements are attributed to SPI from DriBehavGPT faithfully capturing expert semantic reasoning. However, the manuscript provides no human expert review, inter-rater agreement scores, or quantitative fidelity metrics on the generated descriptions, leaving open the possibility that gains arise from LLM noise or bias rather than true alignment (as highlighted by the weakest assumption in the reader's report).
- [Experiments] Experiments section: The abstract states F1 improvements of 7.6% (car-following) and 7.9% (lane-changing) but supplies no dataset size, baseline details, statistical tests, or confound controls. This absence prevents verification that the data support the central claim of outperforming conventional methods.
minor comments (1)
- Define all acronyms (e.g., SPI, SVM+, LLM) on first use and ensure consistent notation for the embedding and dimensionality-reduction steps.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, with clear indications of planned revisions to strengthen the work.
read point-by-point responses
-
Referee: [Abstract and Method] Abstract and § on DriBehavGPT: The performance improvements are attributed to SPI from DriBehavGPT faithfully capturing expert semantic reasoning. However, the manuscript provides no human expert review, inter-rater agreement scores, or quantitative fidelity metrics on the generated descriptions, leaving open the possibility that gains arise from LLM noise or bias rather than true alignment (as highlighted by the weakest assumption in the reader's report).
Authors: We agree that the absence of direct human expert validation or quantitative fidelity metrics for the DriBehavGPT-generated descriptions represents a gap in substantiating the claim of alignment with expert semantic reasoning. The manuscript currently relies on downstream performance gains as indirect support for the utility of the SPI. To address this, we will revise the relevant sections to explicitly discuss the potential for LLM-generated bias or noise, include qualitative examples of the natural-language descriptions, and add a limitations paragraph acknowledging the lack of inter-rater agreement scores. While a full human evaluation study is beyond the scope of the current work, these changes will clarify the assumptions and provide a more balanced presentation. revision: partial
-
Referee: [Experiments] Experiments section: The abstract states F1 improvements of 7.6% (car-following) and 7.9% (lane-changing) but supplies no dataset size, baseline details, statistical tests, or confound controls. This absence prevents verification that the data support the central claim of outperforming conventional methods.
Authors: We acknowledge that additional experimental details are necessary for full verification and reproducibility. The manuscript describes real-world car-following and lane-changing datasets but does not explicitly report sample sizes, list all baselines with implementation details, or include statistical significance testing in the provided sections. We will revise the experiments section to report dataset sizes (number of trajectories and scenarios), specify the conventional baselines (including standard SVM and other classifiers), add statistical tests (e.g., paired significance tests on F1 scores), and discuss potential confounds such as scenario variability or sensor noise. These updates will be incorporated to directly support the reported improvements. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's core derivation introduces DriBehavGPT to generate natural-language driving behavior descriptions from an external LLM, encodes them via text embedding and dimensionality reduction, and feeds the result as privileged information exclusively into SVM+ training (with inference using only sensor data). The reported F1 improvements (7.6% and 7.9%) are presented as outcomes of experiments on real-world data rather than any equation or step that reduces by construction to a fitted parameter, self-definition, or self-citation chain. No load-bearing self-citations, uniqueness theorems, or ansatzes are invoked that collapse the claimed alignment with expert reasoning back to the inputs. The framework remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLM-generated natural-language descriptions of driving behaviors accurately reflect the semantic reasoning patterns of human experts
invented entities (1)
-
DriBehavGPT
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
DriBehavGPT... generates natural-language descriptions... encoded via text embedding and dimensionality reduction... incorporated as privileged information into Support Vector Machine Plus (SVM+)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Experiments... F1-score improvements of 7.6% (car-following) and 7.9% (lane-changing)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Intelligent in-vehicle inter- action technologies,
P. K. Murali, M. Kaboli, and R. Dahiya, “Intelligent in-vehicle inter- action technologies,” Advanced Intelligent Systems , vol. 4, no. 2, p. 2100122, 2022
work page 2022
-
[2]
Satisfactory driving mode clas- sification based on pedal operation characteristics,
Y . Kim, S. B. Choi, J. J. Oh, and J. Eo, “Satisfactory driving mode clas- sification based on pedal operation characteristics,” IEEE Transactions on Intelligent Vehicles, vol. 9, no. 1, pp. 2988–2998, 2023
work page 2023
-
[3]
Drive mode optimization and path planning for plug-in hybrid electric vehicles,
C.-K. Chau, K. Elbassioni, and C.-M. Tseng, “Drive mode optimization and path planning for plug-in hybrid electric vehicles,” IEEE Transac- tions on Intelligent Transportation Systems , vol. 18, no. 12, pp. 3421– 3432, 2017
work page 2017
-
[4]
B. Gao, K. Cai, T. Qu, Y . Hu, and H. Chen, “Personalized adaptive cruise control based on online driving style recognition technology and model predictive control,” IEEE transactions on vehicular technology , vol. 69, no. 11, pp. 12 482–12 496, 2020
work page 2020
-
[5]
B. Zhu, Y . Jiang, J. Zhao, R. He, N. Bian, and W. Deng, “Typical- driving-style-oriented personalized adaptive cruise control design based on human driving data,” Transportation research part C: emerging technologies, vol. 100, pp. 274–288, 2019
work page 2019
-
[6]
W. Wang, D. Zhao, J. Xi, D. J. LeBlanc, and J. K. Hedrick, “Develop- ment and evaluation of two learning-based personalized driver models for car-following behaviors,” in 2017 American Control Conference (ACC). IEEE, 2017, pp. 1133–1138
work page 2017
-
[7]
Study of semi-active suspension control strategy based on driving behaviour characteristics,
W. Wang and J. Xi, “Study of semi-active suspension control strategy based on driving behaviour characteristics,” International Journal of Vehicle Design, vol. 68, no. 1-3, pp. 141–161, 2015
work page 2015
-
[8]
W. Wang, J. Xi, C. Liu, and X. Li, “Human-centered feed-forward control of a vehicle steering system based on a driver’s path-following characteristics,” IEEE transactions on intelligent transportation systems, vol. 18, no. 6, pp. 1440–1453, 2016
work page 2016
-
[9]
A learning-based approach for lane departure warning systems with a personalized driver model,
W. Wang, D. Zhao, W. Han, and J. Xi, “A learning-based approach for lane departure warning systems with a personalized driver model,” IEEE Transactions on Vehicular Technology, vol. 67, no. 10, pp. 9145–9157, 2018
work page 2018
-
[10]
Online driving style recognition using fuzzy logic,
D. D ¨orr, D. Grabengiesser, and F. Gauterin, “Online driving style recognition using fuzzy logic,” in 17th international IEEE conference on intelligent transportation systems (ITSC) . IEEE, 2014, pp. 1021–1026
work page 2014
-
[11]
Study on the driving style adaptive vehicle longitudinal control strategy,
J. Huang, Y . Chen, X. Peng, L. Hu, and D. Cao, “Study on the driving style adaptive vehicle longitudinal control strategy,” IEEE/CAA Journal of Automatica Sinica , vol. 7, no. 4, pp. 1107–1115, 2020
work page 2020
-
[12]
X. Lin, K. Li, and L. Wang, “A driving-style-oriented adaptive control strategy based pso-fuzzy expert algorithm for a plug-in hybrid electric vehicle,” Expert Systems with Applications , vol. 201, p. 117236, 2022
work page 2022
-
[13]
Comprehensive iden- tification of driving style based on vehicle’s driving cycle recognition,
K. Liang, Z. Zhao, W. Li, J. Zhou, and D. Yan, “Comprehensive iden- tification of driving style based on vehicle’s driving cycle recognition,” IEEE Transactions on Vehicular Technology, vol. 72, no. 1, pp. 312–326, 2022
work page 2022
-
[14]
A. Mohammadnazar, R. Arvin, and A. J. Khattak, “Classifying travel- ers’ driving style using basic safety messages generated by connected vehicles: Application of unsupervised machine learning,” Transportation research part C: emerging technologies , vol. 122, p. 102917, 2021
work page 2021
-
[15]
X. Tian, Y . Cai, X. Sun, Z. Zhu, Y . Wang, and Y . Xu, “Incorporating driving style recognition into mpc for energy management of plug-in hybrid electric buses,” IEEE Transactions on Transportation Electrifica- tion, vol. 9, no. 1, pp. 169–181, 2022. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 11
work page 2022
-
[16]
J. Wang, W. Xu, T. Fu, and R. Jiang, “Recognition of trip-based aggres- sive driving: A system integrated with gaussian mixture model structured of factor-analysis, and hierarchical clustering,” IEEE Transactions on Intelligent Transportation Systems , vol. 23, no. 11, pp. 20 442–20 451, 2022
work page 2022
-
[17]
An embedded driving style recognition approach: Leveraging knowledge in learning,
C. Zhang, W. Wang, Z. Ju, Z. Chen, G. Venture, and J. Xi, “An embedded driving style recognition approach: Leveraging knowledge in learning,” IEEE Transactions on Intelligent Vehicles , 2024
work page 2024
-
[18]
A theory of semantic information,
Y . Zhong, “A theory of semantic information,” China communications, vol. 14, no. 1, pp. 1–17, 2017
work page 2017
-
[19]
Au- tonomous driving: cognitive construction and situation understanding,
S. Chen, Z. Jian, Y . Huang, Y . Chen, Z. Zhou, and N. Zheng, “Au- tonomous driving: cognitive construction and situation understanding,” Science China Information Sciences , vol. 62, pp. 1–27, 2019
work page 2019
-
[20]
Driving style alignment for llm-powered driver agent,
R. Yang, X. Zhang, A. Fernandez-Laaksonen, X. Ding, and J. Gong, “Driving style alignment for llm-powered driver agent,” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 318–11 324
work page 2024
-
[21]
Recent advances in natural language processing via large pre-trained language models: A survey,
B. Min, H. Ross, E. Sulem, A. P. B. Veyseh, T. H. Nguyen, O. Sainz, E. Agirre, I. Heintz, and D. Roth, “Recent advances in natural language processing via large pre-trained language models: A survey,” ACM Computing Surveys, vol. 56, no. 2, pp. 1–40, 2023
work page 2023
-
[22]
Chain-of-thought prompting elicits reasoning in large language models,
J. Wei, X. Wang, D. Schuurmans, M. Bosma, F. Xia, E. Chi, Q. V . Le, D. Zhou et al. , “Chain-of-thought prompting elicits reasoning in large language models,” Advances in neural information processing systems , vol. 35, pp. 24 824–24 837, 2022
work page 2022
-
[23]
On the theory of learnining with privi- leged information,
D. Pechyony and V . Vapnik, “On the theory of learnining with privi- leged information,” Advances in neural information processing systems , vol. 23, 2010
work page 2010
-
[24]
The neural and computational bases of semantic cognition,
M. A. L. Ralph, E. Jefferies, K. Patterson, and T. T. Rogers, “The neural and computational bases of semantic cognition,” Nature reviews neuroscience, vol. 18, no. 1, pp. 42–55, 2017
work page 2017
-
[25]
Understanding common human driving semantics for autonomous vehicles,
Y . Xia, M. Geng, Y . Chen, S. Sun, C. Liao, Z. Zhu, Z. Li, W. Y . Ochieng, P. Angeloudis, M. Elhajj et al., “Understanding common human driving semantics for autonomous vehicles,” Patterns, 2023
work page 2023
-
[26]
E. Gulian, G. Matthews, A. I. Glendon, D. Davies, and L. Debney, “Dimensions of driver stress,” Ergonomics, vol. 32, no. 6, pp. 585–602, 1989
work page 1989
-
[27]
Decision- making style, driving style, and self-reported involvement in road traffic accidents,
D. J. French, R. J. West, J. Elander, and J. M. Wilding, “Decision- making style, driving style, and self-reported involvement in road traffic accidents,” Ergonomics, vol. 36, no. 6, pp. 627–644, 1993
work page 1993
-
[28]
Driving style analysis using primitive driving patterns with bayesian nonparametric approaches,
W. Wang, J. Xi, and D. Zhao, “Driving style analysis using primitive driving patterns with bayesian nonparametric approaches,” IEEE Trans- actions on Intelligent Transportation Systems , vol. 20, no. 8, pp. 2986– 2998, 2018
work page 2018
-
[29]
Ex- ploring behavioral patterns of lane change maneuvers for human-like autonomous driving,
Y . Chen, G. Li, S. Li, W. Wang, S. E. Li, and B. Cheng, “Ex- ploring behavioral patterns of lane change maneuvers for human-like autonomous driving,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 9, pp. 14 322–14 335, 2021
work page 2021
-
[30]
Shareable driving style learning and analysis with a hierarchical latent model,
C. Zhang, W. Wang, Z. Chen, J. Zhang, L. Sun, and J. Xi, “Shareable driving style learning and analysis with a hierarchical latent model,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 9, pp. 11 471–11 484, 2024
work page 2024
-
[31]
A new learning paradigm: Learning using privileged information,
V . Vapnik and A. Vashist, “A new learning paradigm: Learning using privileged information,” Neural networks, vol. 22, no. 5-6, pp. 544–557, 2009
work page 2009
-
[32]
Multi-frequency representation enhancement with privilege information for video super-resolution,
F. Li, L. Zhang, Z. Liu, J. Lei, and Z. Li, “Multi-frequency representation enhancement with privilege information for video super-resolution,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 12 814–12 825
work page 2023
-
[33]
Person re-identification with metric learning using privileged information,
X. Yang, M. Wang, and D. Tao, “Person re-identification with metric learning using privileged information,” IEEE Transactions on Image Processing, vol. 27, no. 2, pp. 791–805, 2017
work page 2017
-
[34]
When does privileged information explain away label noise?
G. Ortiz-Jimenez, M. Collier, A. Nawalgaria, A. N. D’Amour, J. Berent, R. Jenatton, and E. Kokiopoulou, “When does privileged information explain away label noise?” in International Conference on Machine Learning. PMLR, 2023, pp. 26 646–26 669
work page 2023
-
[35]
M. Ganaie and M. Tanveer, “Ensemble deep random vector func- tional link network using privileged information for alzheimer’s disease diagnosis,” IEEE/ACM Transactions on Computational Biology and Bioinformatics, 2022
work page 2022
-
[36]
Privileged modality distillation for vessel border detection in intracoronary imaging,
Z. Gao, J. Chung, M. Abdelrazek, S. Leung, W. K. Hau, Z. Xian, H. Zhang, and S. Li, “Privileged modality distillation for vessel border detection in intracoronary imaging,” IEEE transactions on medical imaging, vol. 39, no. 5, pp. 1524–1534, 2019
work page 2019
-
[37]
Z. Shi and T.-K. Kim, “Learning and refining of privileged information- based rnns for action recognition from depth sequences,” in Proceedings of the IEEE conference on computer vision and pattern recognition , 2017, pp. 3461–3470
work page 2017
-
[38]
Exploring privileged information from simple actions for complex action recognition,
F. Liu, X. Xu, T. Zhang, K. Guo, and L. Wang, “Exploring privileged information from simple actions for complex action recognition,” Neu- rocomputing, vol. 380, pp. 236–245, 2020
work page 2020
-
[39]
E. Sabeti, J. Drews, N. Reamaroon, E. Warner, M. W. Sjoding, J. Gryak, and K. Najarian, “Learning using partially available privileged informa- tion and label uncertainty: Application in detection of acute respiratory distress syndrome,” IEEE journal of biomedical and health informatics , vol. 25, no. 3, pp. 784–796, 2020
work page 2020
-
[40]
Drive like a human: Rethinking autonomous driving with large language models,
D. Fu, X. Li, L. Wen, M. Dou, P. Cai, B. Shi, and Y . Qiao, “Drive like a human: Rethinking autonomous driving with large language models,” in Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2024, pp. 910–919
work page 2024
-
[41]
C. Cui, Y . Ma, X. Cao, W. Ye, and Z. Wang, “Drive as you speak: Enabling human-like interaction with large language models in au- tonomous vehicles,” in Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision , 2024, pp. 902–909
work page 2024
-
[42]
X. Li and Y . Sun, “Stock intelligent investment strategy based on support vector machine parameter optimization algorithm,” Neural Computing and Applications, vol. 32, no. 6, pp. 1765–1775, 2020
work page 2020
-
[43]
Parameter selection of gaussian kernel for one-class svm,
Y . Xiao, H. Wang, and W. Xu, “Parameter selection of gaussian kernel for one-class svm,” IEEE transactions on cybernetics, vol. 45, no. 5, pp. 941–953, 2014
work page 2014
-
[44]
Smo-style algorithms for learning using privileged information
D. Pechyony, R. Izmailov, A. Vashist, and V . Vapnik, “Smo-style algorithms for learning using privileged information.” Dmin, vol. 10, pp. 235–241, 2010
work page 2010
-
[45]
J. Achiam, S. Adler, S. Agarwal, L. Ahmad, I. Akkaya, F. L. Aleman, D. Almeida, J. Altenschmidt, S. Altman, S. Anadkat et al. , “Gpt-4 technical report,” arXiv preprint arXiv:2303.08774 , 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[46]
J. Elander, R. West, and D. French, “Behavioral correlates of individual differences in road-traffic crash risk: An examination of methods and findings.” Psychological bulletin, vol. 113, no. 2, p. 279, 1993
work page 1993
-
[47]
H. Bellem, B. Thiel, M. Schrauf, and J. F. Krems, “Comfort in automated driving: An analysis of preferences for different automated driving styles and their dependence on personality traits,” Transportation research part F: traffic psychology and behaviour , vol. 55, pp. 90–100, 2018
work page 2018
-
[48]
Effects of multisensory distractor interference on attentional driving,
C.-T. Lin, Y . Tian, Y .-K. Wang, T.-T. N. Do, Y .-L. Chang, J.-T. King, K.-C. Huang, and L.-D. Liao, “Effects of multisensory distractor interference on attentional driving,” IEEE transactions on intelligent transportation systems, vol. 23, no. 8, pp. 10 395–10 403, 2022
work page 2022
-
[49]
Sentence-BERT: Sentence Embeddings using Siamese BERT-Networks
N. Reimers, “Sentence-bert: Sentence embeddings using siamese bert- networks,” arXiv preprint arXiv:1908.10084 , 2019
work page internal anchor Pith review Pith/arXiv arXiv 1908
-
[50]
Efficient Estimation of Word Representations in Vector Space
T. Mikolov, “Efficient estimation of word representations in vector space,” arXiv preprint arXiv:1301.3781 , vol. 3781, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[51]
Glove: Global vectors for word representation,
J. Pennington, R. Socher, and C. D. Manning, “Glove: Global vectors for word representation,” in Proceedings of the 2014 conference on empirical methods in natural language processing (EMNLP) , 2014, pp. 1532–1543
work page 2014
-
[52]
Uniform manifold approximation and pro- jection,
J. Healy and L. McInnes, “Uniform manifold approximation and pro- jection,” Nature Reviews Methods Primers , vol. 4, no. 1, p. 82, 2024
work page 2024
-
[53]
R. Krajewski, J. Bock, L. Kloeker, and L. Eckstein, “The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems,” in 2018 21st International Conference on Intelligent Transportation Systems (ITSC) . IEEE, 2018, pp. 2118–2125
work page 2018
-
[54]
Follownet: a comprehensive benchmark for car-following behavior modeling,
X. Chen, M. Zhu, K. Chen, P. Wang, H. Lu, H. Zhong, X. Han, X. Wang, and Y . Wang, “Follownet: a comprehensive benchmark for car-following behavior modeling,” Scientific data, vol. 10, no. 1, p. 828, 2023
work page 2023
-
[55]
Human-like autonomous car-following model with deep reinforcement learning,
M. Zhu, X. Wang, and Y . Wang, “Human-like autonomous car-following model with deep reinforcement learning,” Transportation research part C: emerging technologies , vol. 97, pp. 348–368, 2018
work page 2018
-
[56]
Captur- ing car-following behaviors by deep learning,
X. Wang, R. Jiang, L. Li, Y . Lin, X. Zheng, and F.-Y . Wang, “Captur- ing car-following behaviors by deep learning,” IEEE Transactions on Intelligent Transportation Systems, vol. 19, no. 3, pp. 910–920, 2017
work page 2017
-
[57]
Segmentation and clustering of car-following behavior: Recognition of driving patterns,
B. Higgs and M. Abbas, “Segmentation and clustering of car-following behavior: Recognition of driving patterns,” IEEE Transactions on Intel- ligent Transportation Systems, vol. 16, no. 1, pp. 81–90, 2014
work page 2014
-
[58]
An ensemble deep learning approach for driver lane change intention inference,
Y . Xing, C. Lv, H. Wang, D. Cao, and E. Velenis, “An ensemble deep learning approach for driver lane change intention inference,” Transportation Research Part C: Emerging Technologies , vol. 115, p. 102615, 2020
work page 2020
-
[59]
Prediction of lane- changing maneuvers with automatic labeling and deep learning,
V . Mahajan, C. Katrakazas, and C. Antoniou, “Prediction of lane- changing maneuvers with automatic labeling and deep learning,” Trans- portation research record, vol. 2674, no. 7, pp. 336–347, 2020. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 12
work page 2020
-
[60]
Interaction- aware cut-in behavior prediction and risk assessment for autonomous driving,
J. Zhang, G. Li, Z. Deng, H. Yu, J. P. Huissoon, and D. Cao, “Interaction- aware cut-in behavior prediction and risk assessment for autonomous driving,” IFAC-PapersOnLine, vol. 53, no. 5, pp. 656–663, 2020
work page 2020
-
[61]
G. Yan, H. Yu, C. Zhang, and J. Xi, “Interaction-awareness based inten- tion inference of lag vehicle in lane changing decision-making process for autonomous driving,” in 2023 IEEE 6th International Conference on Industrial Cyber-Physical Systems (ICPS) . IEEE, 2023, pp. 1–8
work page 2023
-
[62]
A time-efficient approach for decision-making style recognition in lane-changing behavior,
S. Yang, W. Wang, C. Lu, J. Gong, and J. Xi, “A time-efficient approach for decision-making style recognition in lane-changing behavior,” IEEE Transactions on Human-Machine Systems , vol. 49, no. 6, pp. 579–588, 2019
work page 2019
-
[63]
Overtaking behaviour of vehicles on undivided roads in non-lane based mixed traffic conditions,
G. Asaithambi and G. Shravani, “Overtaking behaviour of vehicles on undivided roads in non-lane based mixed traffic conditions,” Journal of traffic and transportation engineering (English edition) , vol. 4, no. 3, pp. 252–261, 2017
work page 2017
-
[64]
A comparison of headway and time to collision as safety indicators,
K. V ogel, “A comparison of headway and time to collision as safety indicators,” Accident analysis & prevention , vol. 35, no. 3, pp. 427– 433, 2003
work page 2003
-
[65]
Dbscan revisited, revisited: why and how you should (still) use dbscan,
E. Schubert, J. Sander, M. Ester, H. P. Kriegel, and X. Xu, “Dbscan revisited, revisited: why and how you should (still) use dbscan,” ACM Transactions on Database Systems (TODS) , vol. 42, no. 3, pp. 1–21, 2017. Zhaokun Chen received the B.S. degree in In- telligent Automotive Engineering from the Harbin Institute of Technology, Weihai, China, in 2022. He...
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.