Multi-Sensor Fusion for Extended Object Tracking Exploiting Active and Passive Radio Signals
Pith reviewed 2026-05-18 18:56 UTC · model grok-4.3
The pith
Modeling the agent as an extended object and fusing active device-to-anchor signals with passive multistatic reflections improves positioning accuracy during and after obstructed line-of-sight conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that a Bayesian multi-sensor fusion approach, which models the agent as an extended object scattering and blocking signals and applies a tailored multi-sensor multiple-measurement PDA algorithm to jointly associate active and passive radio measurements, outperforms conventional PDA methods that assume point targets, with the largest benefits observed during and after obstructed line-of-sight conditions on both synthetic and real radio data.
What carries the argument
The multi-sensor and multiple-measurement probabilistic data association (PDA) algorithm that jointly fuses all extended-object-related measurements from active and passive radio links.
If this is right
- Positioning systems can maintain accuracy when direct links are blocked by using reflected signals from the agent itself.
- Measurement origin uncertainty is reduced by jointly processing active and passive data under a single extended-object model.
- Low-complexity simplified variants of the extended-object model enable practical deployment without major performance loss.
- Radio tracking gains robustness against multipath and hardware impairments by exploiting the agent's scattering properties.
Where Pith is reading between the lines
- The same active-plus-passive fusion principle could be tested on vehicle tracking where the target also blocks and reflects radar waves.
- Dynamic adaptation of the body-surface reflection model might reduce errors when users change posture or carry different objects.
- Network-level extensions could let multiple agents share passive measurements to improve collective positioning when individual links are obstructed.
- The approach suggests passive multistatic measurements can serve as a backup when active device-to-anchor links are lost.
Load-bearing premise
The user can be represented as a predictable extended object whose body surface produces a consistent pattern of scattering, attenuation, and blocking of radio signals.
What would settle it
Real-world experiments in which the proposed fusion method shows no accuracy improvement or performs worse than standard point-target PDA during and immediately after obstructed line-of-sight periods would falsify the central performance claim.
Figures










read the original abstract
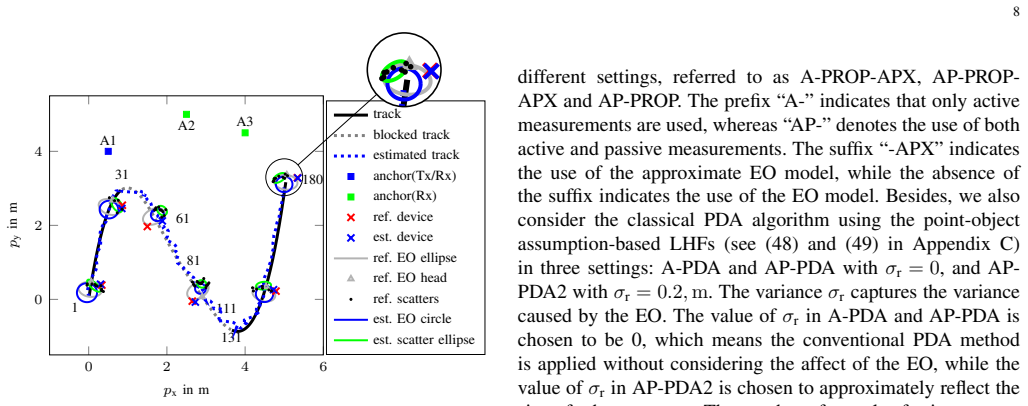
Reliable and robust positioning of radio devices remains a challenging task due to multipath propagation, hardware impairments, and interference from other radio transmitters. A frequently overlooked but critical factor is the agent itself, e.g., the user carrying the device, which potentially obstructs line-of-sight (LOS) links to the base stations (anchors). This paper addresses the problem of accurate positioning in scenarios where LOS links are partially blocked by the agent. The agent is modeled as an extended object (EO) that scatters, attenuates, and blocks radio signals. We propose a Bayesian method that fuses ``active'' measurements (between device and anchors) with ``passive'' multistatic radar-type measurements (between anchors, reflected by the EO). To handle measurement origin uncertainty, we introduce an multi-sensor and multiple-measurement probabilistic data association (PDA) algorithm that jointly fuses all EO-related measurements. Furthermore, we develop an EO model tailored to agents such as human users, accounting for multiple reflections scattered off the body surface, and propose a simplified variant for low-complexity implementation. Evaluation on both synthetic and real radio measurements demonstrates that the proposed algorithm outperforms conventional PDA methods based on point target assumptions, particularly during and after obstructed line-of-sight (OLOS) conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Bayesian multi-sensor fusion method for extended object tracking of radio devices. The agent is modeled as an extended object (EO) that scatters, attenuates, and blocks signals. Active measurements (device-to-anchor) are fused with passive multistatic radar-type measurements (anchor-to-anchor reflections off the EO) using a multi-sensor multiple-measurement probabilistic data association (PDA) algorithm. A tailored EO model for human users accounts for multiple reflections from the body surface, with a simplified low-complexity variant. Evaluation on synthetic and real radio measurements is reported to show outperformance over conventional point-target PDA methods, especially during and after obstructed line-of-sight (OLOS) conditions.
Significance. If the reported gains hold under detailed scrutiny, the work addresses a practically relevant gap in radio positioning by explicitly incorporating the agent's extended physical extent and passive reflections. The joint handling of active/passive measurements and measurement-origin uncertainty via multi-sensor PDA could improve robustness in multipath and obstructed indoor scenarios. No machine-checked proofs or parameter-free derivations are present, but the combination of active/passive fusion with a body-specific EO model is a concrete algorithmic contribution.
major comments (1)
- [Evaluation on real radio measurements] The central outperformance claim (particularly in OLOS) rests on the real-measurement evaluation, yet the manuscript provides no quantification of OLOS interval prevalence, duration, body orientations, or ground-truth acquisition method. Without per-regime error tables or statistical significance tests, it is unclear whether gains are attributable to the EO model and fusion or to dataset characteristics.
minor comments (2)
- [EO model section] Clarify the exact definition and parameterization of the simplified EO variant versus the full multiple-reflection model to allow reproducibility.
- [Numerical results] Add error bars, number of Monte Carlo runs, and baseline implementation details (e.g., exact PDA variants compared) in the synthetic and real-data result figures/tables.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the opportunity to improve the clarity and rigor of our evaluation section. We address the major comment below and will incorporate the suggested enhancements in the revised manuscript.
read point-by-point responses
-
Referee: [Evaluation on real radio measurements] The central outperformance claim (particularly in OLOS) rests on the real-measurement evaluation, yet the manuscript provides no quantification of OLOS interval prevalence, duration, body orientations, or ground-truth acquisition method. Without per-regime error tables or statistical significance tests, it is unclear whether gains are attributable to the EO model and fusion or to dataset characteristics.
Authors: We agree that additional quantitative details on the real-measurement dataset would strengthen the support for our outperformance claims. In the revised manuscript we will add a dedicated paragraph and accompanying table that reports: (i) the total duration and prevalence of OLOS intervals across all recorded trajectories, (ii) the distribution of body orientations relative to the anchor geometry, and (iii) a precise description of the ground-truth acquisition method (optical motion-capture system synchronized with the radio hardware). We will also include per-regime RMSE tables that separate LOS and OLOS periods, together with the results of a paired statistical significance test (Wilcoxon signed-rank test with p-values) comparing the proposed multi-sensor EO-PDA tracker against the conventional point-target PDA baseline. These additions will make explicit that the observed gains, especially the improved recovery after OLOS, are attributable to the joint active/passive fusion and the body-specific extended-object model rather than to particular characteristics of the recorded data. revision: yes
Circularity Check
No significant circularity; derivation is self-contained with external evaluation
full rationale
The paper proposes a Bayesian multi-sensor PDA fusion algorithm and a tailored EO model for human agents that accounts for scattering and reflections. These are presented as algorithmic constructions with stated assumptions, not derived from or reduced to fitted parameters or prior self-citations in a load-bearing way. The central outperformance claim is supported by evaluation on independent synthetic data and real radio measurements, which serve as external benchmarks rather than being forced by the model's own equations. No steps match the enumerated circularity patterns; the derivation chain remains independent of its inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose a Bayesian method that fuses active measurements ... with passive multistatic radar-type measurements ... multi-sensor and multiple-measurement probabilistic data association (PDA) algorithm
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The agent is modeled as an extended object (EO) that scatters, attenuates, and blocks radio signals ... annular sector on the EO's surface
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
K. Witrisal, P. Meissner et al., “High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend,” IEEE Signal Process. Mag. , vol. 33, no. 2, pp. 59–70, Mar. 2016
work page 2016
-
[2]
Dynamic delay-dispersive UWB-radar targets: Modeling and estimation,
J. Gedschold, S. Semper, R. S. Thom ¨a, M. D ¨obereiner, and G. D. Galdo, “Dynamic delay-dispersive UWB-radar targets: Modeling and estimation,” IEEE Trans. Antennas Propag. , vol. 71, no. 8, pp. 6814– 6829, 2023
work page 2023
-
[3]
UWB short-range radar sensing - the architecture of a baseband, pseudo-noise UWB radar sensor,
R. Zetik, J. Sachs, and R. S. Thoma, “UWB short-range radar sensing - the architecture of a baseband, pseudo-noise UWB radar sensor,” IEEE Instrum. Meas. Mag. , vol. 10, no. 2, pp. 39–45, 2007
work page 2007
-
[4]
Radio-based sensing in vehicular environments: Robust localization and tracking of VRUs,
F. de Ponte M ¨uller, M. Schmidhammer, and S. Sand, “Radio-based sensing in vehicular environments: Robust localization and tracking of VRUs,” in Proc. IEEE 97th Veh. Technol. Conf. (VTC2023-Spring) , 2023, pp. 1–6
work page 2023
-
[5]
Multipath-based SLAM for cooperative navigation and map fusion,
E. Leitinger, L. Wielandner, A. Venus, and K. Witrisal, “Multipath-based SLAM for cooperative navigation and map fusion,” in Proc. Asilomar- 24, Pacific Grove, CA, USA, Oct. 2024
work page 2024
-
[6]
Distributed direct localization suit- able for dense networks,
S. Zhang, E. Staudinger, T. Jost, W. Wang, C. Gentner, A. Dammann, H. Wymeersch, and P. A. Hoeher, “Distributed direct localization suit- able for dense networks,” IEEE Trans. Aerosp. Electron. Syst. , vol. 56, no. 2, pp. 1209–1227, July 2020
work page 2020
-
[7]
Evaluation of position-related information in multipath components for indoor positioning,
E. Leitinger, P. Meissner, C. Rudisser, G. Dumphart, and K. Witrisal, “Evaluation of position-related information in multipath components for indoor positioning,” IEEE J. Sel. Areas Commun. , vol. 33, no. 11, pp. 2313–2328, Nov. 2015
work page 2015
-
[8]
Har- nessing NLOS Components for Position and Orientation Estimation in 5G Millimeter Wave MIMO,
R. Mendrzik, H. Wymeersch, G. Bauch, and Z. Abu-Shaban, “Har- nessing NLOS Components for Position and Orientation Estimation in 5G Millimeter Wave MIMO,” IEEE Trans. Wireless Commun., vol. 18, no. 1, pp. 93–107, 2019
work page 2019
-
[9]
Data fusion for multipath-based SLAM: Combining information from multiple propa- gation paths,
E. Leitinger, A. Venus, B. Teague, and F. Meyer, “Data fusion for multipath-based SLAM: Combining information from multiple propa- gation paths,” IEEE Trans. Signal Process. , vol. 71, pp. 4011–4028, Sep. 2023
work page 2023
-
[10]
Graph- based simultaneous localization and bias tracking,
A. Venus, E. Leitinger, S. Tertinek, F. Meyer, and K. Witrisal, “Graph- based simultaneous localization and bias tracking,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 13 141–13 158, May 2024
work page 2024
-
[11]
Multipath-based localization and tracking considering off-body channel effects,
T. Wilding, E. Leitinger, and K. Witrisal, “Multipath-based localization and tracking considering off-body channel effects,” in Proc. 16th Eur. Conf. Antennas Propag. (EuCAP) , Madrid, Spain, May 2022, pp. 1–5
work page 2022
-
[12]
Extended object tracking: Introduction, overview and applications,
K. Granstr ¨om and M. Baum, “Extended object tracking: Introduction, overview and applications,” J. Adv. Inf. Fusion, vol. 12, no. 2, pp. 139– 174, Dec. 2017
work page 2017
-
[13]
Extended object tracking with random hypersurface models,
M. Baum and U. D. Hanebeck, “Extended object tracking with random hypersurface models,”IEEE Trans. Aerosp. Electron. Syst., vol. 50, no. 1, pp. 149–159, 2014
work page 2014
-
[14]
Multiple extended object tracking using Gaussian processes,
T. Hirscher, A. Scheel, S. Reuter, and K. Dietmayer, “Multiple extended object tracking using Gaussian processes,” in Proc. Fusion-2016, Hei- delberg, Germany, Jul. 2016, pp. 868–875
work page 2016
-
[15]
Three-dimensional extended object tracking and shape learning using Gaussian processes,
M. Kumru and E. ¨Ozkan, “Three-dimensional extended object tracking and shape learning using Gaussian processes,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 5, pp. 2795–2814, 2021
work page 2021
-
[16]
Bayesian approach to extended object and cluster tracking using random matrices,
J. W. Koch, “Bayesian approach to extended object and cluster tracking using random matrices,” IEEE Trans. Aerosp. Electron. Syst. , vol. 44, no. 3, pp. 1042–1059, 2008
work page 2008
-
[17]
Tracking of extended objects and group targets using random matrices,
M. Feldmann, D. Fr ¨anken, and W. Koch, “Tracking of extended objects and group targets using random matrices,” IEEE Trans. Signal Process., vol. 59, no. 4, pp. 1409–1420, 2011
work page 2011
-
[18]
Probabilistic data association for tracking extended targets under clutter using random matrices,
M. Schuster, J. Reuter, and G. Wanielik, “Probabilistic data association for tracking extended targets under clutter using random matrices,” in Proc. Fusion-2015, Washington, DC, USA, Jul. 2015, pp. 961–968
work page 2015
-
[19]
Tracking of extended object using random matrix with non-uniformly distributed measurements,
L. Zhang and J. Lan, “Tracking of extended object using random matrix with non-uniformly distributed measurements,” IEEE Trans. Signal Process., vol. 69, pp. 3812–3825, 2021
work page 2021
-
[20]
Tracking rectangular and elliptical extended targets using laser measurements,
K. Granstr ¨om, C. Lundquist, and U. Orguner, “Tracking rectangular and elliptical extended targets using laser measurements,” in Proc. Fusion- 2011, Chicago, IL, USA, Jul. 2011, pp. 1–8
work page 2011
-
[21]
A multiple model PHD approach to tracking of cars under an assumed rectangular shape,
K. Granstr ¨om, S. Reuter, D. Meissner, and A. Scheel, “A multiple model PHD approach to tracking of cars under an assumed rectangular shape,” in Proc. Fusion-2014, Salamanca, Spain, Jul. 2014, pp. 1–8
work page 2014
-
[22]
A. Venus, E. Leitinger, S. Tertinek, and K. Witrisal, “A graph- based algorithm for robust sequential localization exploiting multipath for obstructed-LOS-bias mitigation,” IEEE Trans. Wireless Commun. , vol. 23, no. 2, pp. 1068–1084, June 2023
work page 2023
-
[23]
The probabilistic data associ- ation filter,
Y . Bar-Shalom, F. Daum, and J. Huang, “The probabilistic data associ- ation filter,” IEEE Control Syst. Mag. , vol. 29, no. 6, pp. 82–100, Dec 2009
work page 2009
-
[24]
Scalable detection and tracking of geometric extended objects,
F. Meyer and J. L. Williams, “Scalable detection and tracking of geometric extended objects,” IEEE Trans. Signal Process. , vol. 69, pp. 6283–6298, 2021
work page 2021
-
[25]
L. Wielandner, A. Venus, T. Wilding, and E. Leitinger, “Multipath-based SLAM for non-ideal reflective surfaces exploiting multiple-measurement data association,” J. Adv. Inf. Fusion , vol. 18, pp. 59–77, Dec. 2023
work page 2023
-
[26]
MIMO multipath-based SLAM for non-ideal reflective surfaces,
L. Wielandner, A. Venus, T. Wilding, K. Witrisal, and E. Leitinger, “MIMO multipath-based SLAM for non-ideal reflective surfaces,” in Proc. Fusion-2024, Venice, Italy, Jul. 2024
work page 2024
-
[27]
Fusion of active and passive measurements for robust and scalable positioning,
H. Zhu, A. Venus, E. Leitinger, S. Tertinek, and K. Witrisal, “Fusion of active and passive measurements for robust and scalable positioning,” in Proc. IEEE 4th Int. Symp. Joint Commun. & Sens. (JC&S) , Leuven, Belgium, Mar. 2024, pp. 1–6
work page 2024
-
[28]
Multi-sensor fusion of active and passive measurements for extended object tracking,
H. Zhu, A. Venus, E. Leitinger, and K. Witrisal, “Multi-sensor fusion of active and passive measurements for extended object tracking,”
-
[29]
Available: https://arxiv.org/abs/2504.18301
[Online]. Available: https://arxiv.org/abs/2504.18301
-
[30]
Kay, Fundamentals of Statistical Signal Processing: Detection The- ory
S. Kay, Fundamentals of Statistical Signal Processing: Detection The- ory. Upper Saddle River, NJ, USA: Prentice Hall, 1998
work page 1998
-
[31]
An off-body channel model for body area networks in indoor environments,
S. J. Ambroziak, L. M. Correia, R. J. Katulski, M. Mackowiak, C. Oliveira, J. Sadowski, and K. Turbic, “An off-body channel model for body area networks in indoor environments,” IEEE Trans. Antennas Propag., vol. 64, no. 9, pp. 4022–4035, 2016
work page 2016
-
[32]
Modeling human body influence in UWB channels,
T. Wilding, E. Leitinger, U. Muehlmann, and K. Witrisal, “Modeling human body influence in UWB channels,” in Proc. IEEE 31st Annu. Int. Symp. Pers., Indoor Mobile Radio Commun. (PIMRC), London, UK, Aug. 2020, pp. 1–6. 16
work page 2020
-
[33]
Y . Bar-Shalom, T. Kirubarajan, and X.-R. Li, Estimation with Applica- tions to Tracking and Navigation . New York, NY , USA: John Wiley & Sons, Inc., 2002
work page 2002
-
[34]
Superfast line spectral estimation,
T. L. Hansen, B. H. Fleury, and B. D. Rao, “Superfast line spectral estimation,” IEEE Trans. Signal Process., vol. PP, no. 99, pp. 1–1, Feb. 2018
work page 2018
-
[35]
S. Grebien, E. Leitinger, K. Witrisal, and B. H. Fleury, “Super-resolution estimation of UWB channels including the dense component – An SBL- inspired approach,” IEEE Trans. Wireless Commun. , vol. 23, no. 8, pp. 10 301–10 318, Feb. 2024
work page 2024
-
[36]
Variational inference of structured line spectra exploiting group-sparsity,
J. M ¨oderl, F. Pernkopf, K. Witrisal, and E. Leitinger, “Variational inference of structured line spectra exploiting group-sparsity,” IEEE Trans. Signal Process., Nov. 2024
work page 2024
-
[37]
J. M ¨oderl, A. M. Westerkam, A. Venus, and E. Leitinger, “A block-sparse Bayesian learning algorithm with dictionary parameter estimation for multi-sensor data fusion,” in Proc. Fusion-2025, Brasil, Rio De Janeiro, Jul. 2025
work page 2025
-
[38]
Bandwidth scaling and diversity gain for ranging and positioning in dense multipath channels,
K. Witrisal, E. Leitinger, S. Hinteregger, and P. Meissner, “Bandwidth scaling and diversity gain for ranging and positioning in dense multipath channels,” IEEE Wireless Commun. Lett. , vol. 5, no. 4, pp. 396–399, Aug. 2016
work page 2016
-
[39]
Monte carlo methods for signal processing: a review in the statistical signal processing context,
D. A. and W. X., “Monte carlo methods for signal processing: a review in the statistical signal processing context,” IEEE Signal Process. Mag., vol. 22, no. 6, pp. 152–170, Nov. 2005
work page 2005
- [40]
-
[41]
Kay, Fundamentals of Statistical Signal Processing: Estimation Theory
S. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory. Upper Saddle River, NJ, USA: Prentice Hall, 1993
work page 1993
-
[42]
Factor graphs and the sum-product algorithm,
F. Kschischang, B. Frey, and H.-A. Loeliger, “Factor graphs and the sum-product algorithm,” IEEE Trans. Inf. Theory , vol. 47, no. 2, pp. 498–519, Feb. 2001
work page 2001
-
[43]
Distributed localization and tracking of mobile networks including noncooperative objects,
F. Meyer, O. Hlinka, H. Wymeersch, E. Riegler, and F. Hlawatsch, “Distributed localization and tracking of mobile networks including noncooperative objects,” IEEE Trans. Signal Inf. Process. Netw. , vol. 2, no. 1, pp. 57–71, 2016
work page 2016
-
[44]
A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,
M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,” IEEE Trans. Signal Process. , vol. 50, no. 2, pp. 174–188, Feb. 2002
work page 2002
-
[45]
Posterior Cramer-Rao bounds for discrete-time nonlinear filtering,
P. Tichavsky, C. Muravchik, and A. Nehorai, “Posterior Cramer-Rao bounds for discrete-time nonlinear filtering,” IEEE Trans. Signal Pro- cess., vol. 46, no. 5, pp. 1386–1396, May 1998
work page 1998
-
[46]
Sequential detection and estimation of multipath channel parameters using belief propaga- tion,
X. Li, E. Leitinger, A. Venus, and F. Tufvesson, “Sequential detection and estimation of multipath channel parameters using belief propaga- tion,” IEEE Trans. Wireless Commun. , pp. 1–1, 2022
work page 2022
-
[47]
Performance of a crossed exponentially tapered slot antenna for UWB systems,
J. R. Costa, C. R. Medeiros, and C. A. Fernandes, “Performance of a crossed exponentially tapered slot antenna for UWB systems,” IEEE Trans. Antennas Propag., vol. 57, no. 5, pp. 1345–1352, 2009
work page 2009
-
[48]
A neural-enhanced factor graph-based algorithm for robust positioning in obstructed LOS situations,
A. Venus, E. Leitinger, S. Tertinek, and K. Witrisal, “A neural-enhanced factor graph-based algorithm for robust positioning in obstructed LOS situations,” IEEE Open J. of Signal Process. , vol. 5, pp. 29–38, Nov. 2023
work page 2023
-
[49]
Neural enhanced belief propagation for multiobject tracking,
M. Liang and F. Meyer, “Neural enhanced belief propagation for multiobject tracking,” IEEE Trans. Signal Process. , vol. 72, pp. 15–30, Sept. 2023
work page 2023
-
[50]
M. Liang, E. Leitinger, and F. Meyer, “Direct multipath-based SLAM,” IEEE Trans. Signal Process. , vol. 73, pp. 2336–2352, 2025
work page 2025
-
[51]
A. Papoulis and S. Pillai, Probability, Random Variables, and Stochastic Processes. McGraw-Hill, 2001
work page 2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.