Invariants from involutory Hopf algebras of 3-manifolds with embedded framed links
Pith reviewed 2026-05-18 17:27 UTC · model grok-4.3
The pith
Invariants of three-manifolds with embedded framed links are obtained from involutory Hopf algebras and representations of their Drinfeld doubles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
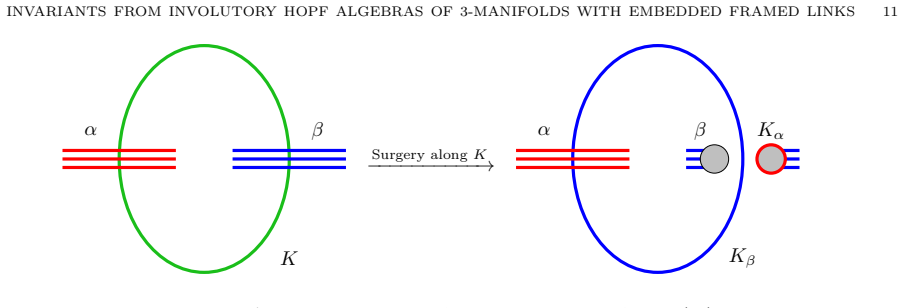
We construct an invariant of the pair consisting of a closed connected oriented three-manifold M and an oriented framed link L embedded in M. The invariant is defined using an involutory Hopf algebra H and a representation of the Drinfeld double of H by first choosing a Heegaard-Link diagram for (M, L) and then evaluating an expression built from the algebra data. When the link L is empty the invariant equals the Kuperberg invariant of M. When M is the three-sphere and the representation is chosen suitably the invariant equals the Hennings-Kauffman-Radford invariant of L. When the representation is the left regular representation the invariant equals the Kuperberg invariant of the manifold M
What carries the argument
Heegaard-Link diagrams that simultaneously encode the three-manifold and the embedded framed link, together with the algebraic data of an involutory Hopf algebra and a module over its Drinfeld double.
If this is right
- Setting the link to be empty recovers the Kuperberg invariant of the three-manifold.
- Special choices of the representation recover the Hennings-Kauffman-Radford invariant when the manifold is the three-sphere.
- The left regular representation produces the Kuperberg invariant of the surgery manifold obtained from the link.
- The colored version of the invariant coincides with the Witten-Reshetikhin-Turaev invariant for colored links.
Where Pith is reading between the lines
- The diagram-based construction may extend the range of manifolds and links for which explicit invariant values can be calculated.
- Different representations of the same Hopf algebra data unify several previously separate invariants under one framework.
- Similar diagram techniques could be used to define invariants from other algebraic objects in three-dimensional topology.
Load-bearing premise
Any two Heegaard-Link diagrams for the same manifold and link produce the same scalar when evaluated with the given Hopf algebra and representation.
What would settle it
Finding a manifold-link pair together with two Heegaard-Link diagrams for it such that the algebraic evaluation gives two different numbers.
Figures


read the original abstract
We give invariants of pairs $(M,L)$ consisting of a closed connected oriented three-manifold and an (oriented) framed link $L$ embedded in $M$. This invariant generalizes the Kuperberg and Hennings-Kauffman-Radford (HKR) invariants of three-manifolds. We define Heegaard-Link diagrams which represent the pair $(M,L)$ and use the data of an involutory Hopf algebra and a representation of the Drinfeld double to construct the invariant. We show that if $L$ is the empty link, then the invariant recovers the Kuperberg invariant, and if $M$ is the three-sphere and certain particular representation is chosen, then the invariant recovers the HKR invariant. We also show that if the representation is the left regular representation of the Drinfeld double, then we recover the Kuperberg invariant of the surgery manifold $M(L)$, contributing to a new proof of the relationship between the HKR and Kuperberg invariants in the semisimple setting. To this end, we give a Heegaard diagram for $M(L)$ coming from the Heegaard-Link diagram representing the pair $(M,L)$. We also introduce a colored link invariant extending the construction and show it recovers the Witten-Reshetikhin-Turaev colored link invariant.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript constructs invariants of pairs (M, L), where M is a closed connected oriented 3-manifold and L is an embedded oriented framed link, from the data of an involutory Hopf algebra H together with a representation of its Drinfeld double. The construction proceeds by associating a scalar to Heegaard-Link diagrams via tensor contraction; specializations recover the Kuperberg invariant when L is empty, the HKR invariant when M = S^3 and a particular representation is chosen, and the Kuperberg invariant of the surgery manifold M(L) when the left regular representation is used, thereby supplying a new proof of the HKR–Kuperberg relationship in the semisimple case. A colored extension recovering the Witten–Reshetikhin–Turaev colored link invariant is also defined.
Significance. If the invariance statement holds, the work supplies a single algebraic framework that simultaneously generalizes two classical 3-manifold invariants and yields an explicit new proof of their relationship via surgery diagrams. The recovery statements are obtained by direct specialization rather than by reduction to previously normalized quantities, and the introduction of a colored version extends the construction to link invariants. These features would be of interest to researchers working at the interface of Hopf algebras and quantum topology.
major comments (2)
- [Construction paragraph after definition of Heegaard-Link diagrams] Construction paragraph following the definition of Heegaard-Link diagrams: the claim that the tensor contraction is invariant under the full set of moves (Heegaard stabilizations, handle slides, framed-link isotopies, and surgery-induced changes) is asserted on the basis of the involutory condition and the Drinfeld-double representation, yet no explicit verification is supplied showing that each generator acts trivially on the contraction. Because this independence is required for the scalar to be well-defined on the pair (M, L), the verification must be expanded with case-by-case tensor calculations or diagrammatic identities.
- [Section on recovery of invariants and surgery diagrams] Recovery of the Kuperberg invariant of M(L) via the left regular representation: the manuscript states that a Heegaard diagram for the surgery manifold M(L) is obtained from the Heegaard-Link diagram of (M, L), but the precise correspondence between the resulting diagram and the standard input for the Kuperberg invariant is not exhibited in sufficient detail to confirm that no additional normalization or choice of basis is introduced.
minor comments (3)
- The distinction between the Hopf algebra H and the chosen representation of its Drinfeld double should be made explicit in the notation of the first two sections to avoid ambiguity when the same symbol appears in both contexts.
- Inclusion of one or two concrete diagrams illustrating a representative Heegaard-Link move and the corresponding tensor contraction would materially aid the reader in following the invariance argument.
- A short remark comparing the present construction with other Hopf-algebraic invariants that also employ Drinfeld doubles (e.g., recent work on non-semisimple cases) would help situate the contribution.
Simulated Author's Rebuttal
We thank the referee for the thorough reading and constructive feedback on our manuscript. The comments highlight areas where additional explicit detail would strengthen the presentation of the invariance and recovery statements. We address each major comment below and will incorporate the suggested expansions in the revised version.
read point-by-point responses
-
Referee: [Construction paragraph after definition of Heegaard-Link diagrams] Construction paragraph following the definition of Heegaard-Link diagrams: the claim that the tensor contraction is invariant under the full set of moves (Heegaard stabilizations, handle slides, framed-link isotopies, and surgery-induced changes) is asserted on the basis of the involutory condition and the Drinfeld-double representation, yet no explicit verification is supplied showing that each generator acts trivially on the contraction. Because this independence is required for the scalar to be well-defined on the pair (M, L), the verification must be expanded with case-by-case tensor calculations or diagrammatic identities.
Authors: We agree that a more explicit verification of invariance under each generator of the moves would improve clarity and rigor. While the manuscript relies on the involutory property of H together with the chosen representation of the Drinfeld double to ensure the contraction is invariant, we will expand the relevant construction paragraph in the revised manuscript with case-by-case tensor calculations. These will demonstrate that each move (Heegaard stabilizations, handle slides, framed-link isotopies, and surgery-induced changes) acts trivially on the contraction, supplemented by diagrammatic identities where helpful. This addition will make the well-definedness of the scalar on (M, L) fully transparent. revision: yes
-
Referee: [Section on recovery of invariants and surgery diagrams] Recovery of the Kuperberg invariant of M(L) via the left regular representation: the manuscript states that a Heegaard diagram for the surgery manifold M(L) is obtained from the Heegaard-Link diagram of (M, L), but the precise correspondence between the resulting diagram and the standard input for the Kuperberg invariant is not exhibited in sufficient detail to confirm that no additional normalization or choice of basis is introduced.
Authors: We acknowledge that the precise correspondence between the Heegaard diagram obtained from the Heegaard-Link diagram and the standard input for the Kuperberg invariant could be presented with greater detail. In the revised manuscript we will add an expanded paragraph or short subsection that explicitly tracks the sequence of handle slides, stabilizations, and isotopies converting the diagram of (M, L) under the left regular representation into a standard Heegaard diagram for M(L). This will confirm that the resulting scalar matches the Kuperberg invariant directly, without introducing extra normalizations or basis choices beyond those already fixed by the construction. revision: yes
Circularity Check
No significant circularity: direct algebraic definition with specialization recoveries
full rationale
The paper constructs the invariant explicitly from an involutory Hopf algebra H and a representation of its Drinfeld double applied to a Heegaard-Link diagram of the pair (M,L). Invariance under the relevant moves is asserted to follow from the algebraic properties of the involutory condition and the representation (rather than being fitted or renamed from prior data). Recoveries of the Kuperberg and HKR invariants are shown by direct specialization to the empty link or to S^3 with a particular representation, which does not reduce the new quantity to a previously fitted parameter. No self-definitional loops, fitted-input predictions, or load-bearing self-citations appear in the derivation chain as described.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Involutory Hopf algebras satisfy the standard axioms of Hopf algebras with antipode squared equal to the identity.
- domain assumption Representations of the Drinfeld double can be used to color or evaluate the diagrams.
invented entities (1)
-
Heegaard-Link diagram
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We define Heegaard-Link diagrams which represent the pair (M,L) and use the data of an involutory Hopf algebra and a representation of the Drinfeld double to construct the invariant.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
John W. Barrett and Bruce W. Westbury. Invariants of piecewise linear three manifolds . Trans. Am. Math. Soc. , 348:3997--4022, 1996
work page 1996
-
[2]
Liang Chang and Shawn X. Cui. On two invariants of three manifolds from hopf algebras. Advances in Mathematics , 351:621--652, 2019
work page 2019
-
[3]
A new proof of Z_ Kup =|Z_ Henn |^2 for semisimple hopf algebras, 2016
Liang Chang. A new proof of Z_ Kup =|Z_ Henn |^2 for semisimple hopf algebras, 2016
work page 2016
-
[4]
On the relation between the wrt invariant and the hennings invariant
Qi Chen, Srikanth Kuppum, and Parthasarathy Srinivasan. On the relation between the wrt invariant and the hennings invariant. Mathematical Proceedings of the Cambridge Philosophical Society , 146(1):151–163, 2009
work page 2009
-
[5]
|Z_ Kup |=|Z_ Henn |^2 for lens spaces
Liang Chang and Zhenghan Wang. |Z_ Kup |=|Z_ Henn |^2 for lens spaces. Quantum Topol. , 4(4):411--445, November 2013
work page 2013
-
[6]
Three-manifold invariants associated with restricted quantum groups
Qi Chen, Chih-Chien Yu, and Yu Zhang. Three-manifold invariants associated with restricted quantum groups. Mathematische Zeitschrift , 272, 12 2012
work page 2012
-
[7]
V. G. Drinfel'd. Quantum groups. Journal of Soviet Mathematics , 41(2):898--915, 1988
work page 1988
-
[8]
Invariants of links and 3-manifolds obtained from hopf algebras
Mark Hennings. Invariants of links and 3-manifolds obtained from hopf algebras. Journal of the London Mathematical Society , 54(3):594--624, 1996
work page 1996
-
[9]
Intersections of curves on surfaces
Joel Hass and Peter Scott. Intersections of curves on surfaces. Israel Journal of Mathematics , 51(1):90--120, 1985
work page 1985
-
[10]
Genealogy of non-perturbative quantum-invariants of 3-manifolds: the surgical family
Thomas Kerler. Genealogy of non-perturbative quantum-invariants of 3-manifolds: the surgical family. In Geometry and physics , pages 503--547. CRC Press, 1996
work page 1996
-
[11]
Thomas Kerler. Homology tqft’s and the alexander–reidemeister invariant of 3-manifolds via hopf algebras and skein theory. Canadian Journal of Mathematics , 55(4):766–821, 2003
work page 2003
-
[12]
Invariants of 3-manifolds derived from finite dimensional hopf algebras
Louis H Kauffman and David E Radford. Invariants of 3-manifolds derived from finite dimensional hopf algebras. Journal of knot theory and its ramifications , 4(01):131--162, 1995
work page 1995
-
[13]
Involutory hopf algebras and 3-manifold invariants
Greg Kuperberg. Involutory hopf algebras and 3-manifold invariants. International Journal of Mathematics , 02(01):41--66, 1991
work page 1991
-
[14]
Non-involutory hopf algebras and 3-manifold invariants
Greg Kuperberg. Non-involutory hopf algebras and 3-manifold invariants. Duke Mathematical Journal , 84(01):83--129, 1996
work page 1996
-
[15]
Holomorphic disks, link invariants and the multi-variable alexander polynomial
Peter Ozsv \'a th and Zolt \'a n Szab \'o . Holomorphic disks, link invariants and the multi-variable alexander polynomial. Algebraic & Geometric Topology , 8(2):615--692, 2008
work page 2008
-
[16]
Peter S. Ozsváth, András I. Stipsicz, and Zoltán Szabó. Heegaard floer homology. In Progress, version August 20, 2024
work page 2024
- [17]
-
[18]
D.E. Radford. Hopf Algebras . K & E series on knots and everything. World Scientific, 2011
work page 2011
-
[19]
Skein theory and turaev-viro invariants
Justin Roberts. Skein theory and turaev-viro invariants. Topology , 34(4):771--787, 1995
work page 1995
-
[20]
Invariants of 3-manifolds via link polynomials and quantum groups
N Reshetikhin and V G Turaev. Invariants of 3-manifolds via link polynomials and quantum groups. Invent. Math. , 103(1):547--597, December 1991
work page 1991
-
[21]
Modular categories and 3-manifold invariants
Vladimir G Turaev. Modular categories and 3-manifold invariants. Int. J. Mod. Phys. B , 06(11n12):1807--1824, June 1992
work page 1992
-
[22]
Quantum invariants of 3-manifold and a glimpse of shadow topology
Vladimir Turaev. Quantum invariants of 3-manifold and a glimpse of shadow topology. In Quantum Groups: Proceedings of Workshops held in the Euler International Mathematical Institute, Leningrad, Fall 1990 , pages 363--366. Springer, 2006
work page 1990
-
[23]
Quantum Invariants of Knots and 3-Manifolds
Vladimir G Turaev. Quantum Invariants of Knots and 3-Manifolds . De Gruyter Studies in Mathematics. De Gruyter, Berlin, Germany, 3 edition, July 2016
work page 2016
-
[24]
V.G. Turaev and O.Y. Viro. State sum invariants of 3-manifolds and quantum 6j-symbols. Topology , 31(4):865--902, 1992
work page 1992
-
[25]
On two approaches to 3-dimensional tqfts, 2013
Vladimir Turaev and Alexis Virelizier. On two approaches to 3-dimensional tqfts, 2013
work page 2013
-
[26]
On witten’s 3-manifold invariants
Kevin Walker. On witten’s 3-manifold invariants. preprint , 116:133, 1991
work page 1991
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.