Hadamard-Based Recursive Aperture Decoded Ultrasound Imaging (READI) With Estimated Motion-Compensated Compounding (EMC2) Using Top-Orthogonal to Bottom Electrode (TOBE) Arrays
Pith reviewed 2026-05-18 17:13 UTC · model grok-4.3
The pith
Recursive decoding with motion estimation restores high-resolution ultrasound images from moving probes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
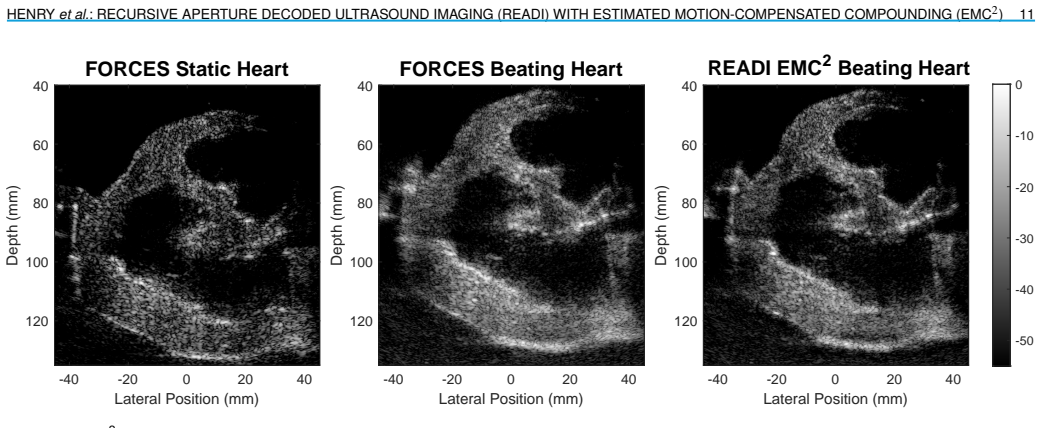
READI is a novel decoding and beamforming technique for Hadamard aperture-encoded sequences that produces multiple low-resolution images from subsets of the full sequence. These READI images are less affected by motion and sum to form the complete high-resolution image. EMC2 describes the process of comparing these low-resolution images to estimate the underlying motion, then warping them to align before compounding. This produces a high-resolution image that is resilient to motion. READI with EMC2 applied to the TOBE-based FORCES sequence fully restores images corrupted by probe motion and recovers tissue speckle and boundaries in images of a beating heart phantom. READI low-resolution sub-
What carries the argument
READI low-resolution sub-images generated from subsets of the Hadamard sequence, aligned via EMC2 motion estimation and compounding.
If this is right
- High-resolution images can be recovered from Hadamard sequences even when the probe moves during acquisition.
- READI low-resolution images by themselves improve on sparse Hadamard schemes that use the same number of transmits.
- Blood speckle remains visible at flow speeds of 42 cm/s when using the low-resolution READI sub-images.
- Tissue speckle and boundaries are recovered in dynamic heart-phantom scans where conventional compounding fails.
Where Pith is reading between the lines
- The sub-image alignment step could be combined with external tracking sensors to handle faster or more complex motions in clinical scans.
- The same READI splitting idea might reduce transmit count while preserving quality on other array geometries besides TOBE.
- Extending the motion estimation to include deformation rather than rigid warping could address tissue compression during cardiac cycles.
- Testing the method on in-vivo data with breathing or patient movement would show how well the estimated warping generalizes outside phantoms.
Load-bearing premise
Motion between the low-resolution READI sub-images can be estimated accurately enough from their differences to allow reliable warping and compounding without introducing new artifacts.
What would settle it
Image a beating heart phantom with known controlled probe motion, process the data with READI plus EMC2, and check whether the output matches a static reference image in speckle texture and boundary position.
Figures












read the original abstract
Hadamard matrix-based aperture encoding is a method for producing synthetic aperture datasets with high Signal-to-Noise Ratios. Recently, the pulse inversion capabilities of bias-sensitive Top-Orthogonal to Bottom Electrode (TOBE) arrays have driven the development of multiple Hadamard-based sequences. These sequences produce high-quality static images but are sensitive to motion. This work introduces Recursive Aperture Decoded Imaging (READI) and Estimated Motion-Compensated Compounding (EMC2), which look to reduce this sensitivity. READI is a novel decoding and beamforming technique for Hadamard aperture-encoded sequences that produces multiple low-resolution images from subsets of the full sequence. These READI images are less affected by motion and sum to form the complete high-resolution image. EMC2 describes the process of comparing these low-resolution images to estimate the underlying motion, then warping them to align before compounding. This produces a high-resolution image that is resiliant to motion. READI with EMC2 applied to the TOBE-based Fast Orthogonal Row-Column Electronic Scanning (FORCES) sequence. It is shown to fully restore images corrupted by probe motion and to recover tissue speckle and boundaries in images of a beating heart phantom. READI low-resolution images by themselves are demonstrated to be a marked improvement over a sparse Hadamard scheme with the same transmit count, and are able to recover blood speckle at a flow rate of 42 cm/s.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Recursive Aperture Decoded Imaging (READI), a decoding and beamforming method that generates multiple low-resolution images from subsets of a Hadamard-encoded TOBE sequence, and Estimated Motion-Compensated Compounding (EMC2), which estimates motion from differences among these sub-images, warps them, and compounds to form a high-resolution output. Applied to the FORCES sequence, the work claims that READI+EMC2 fully restores probe-motion-corrupted images, recovers tissue speckle and boundaries in a beating-heart phantom, and outperforms a sparse Hadamard scheme with equivalent transmit count while recovering blood speckle at 42 cm/s.
Significance. If the motion-compensation step proves robust, the pipeline would address a key limitation of Hadamard-encoded TOBE sequences—sensitivity to probe or tissue motion—potentially enabling high-SNR synthetic-aperture imaging in cardiac and other dynamic applications. The approach is presented as a processing pipeline rather than a parameter-free derivation, and the phantom demonstrations of speckle preservation and motion recovery constitute the primary empirical support.
major comments (2)
- [Results (beating heart phantom experiments)] Results section on the beating-heart phantom: the central claim of 'full restoration' of motion-corrupted images rests on EMC2 accurately recovering displacement fields from the low-resolution READI sub-images, yet no registration-error metrics, residual-motion variance, or comparison against known ground-truth displacements are reported. Without these, it is impossible to verify that warping and summation do not re-introduce blur or coherent artifacts for the non-rigid, rapid motion present in the phantom.
- [Methods (EMC2)] Methods description of EMC2: the motion-estimation step is described as comparing low-resolution READI sub-images, but the manuscript provides neither the specific registration algorithm nor quantitative validation of its accuracy on the reduced-SNR, limited-support sub-images that result from disjoint Hadamard subsets. This assumption is load-bearing for the claim that EMC2 restores images without introducing new artifacts.
minor comments (2)
- [Abstract] The abstract states that READI images 'sum to form the complete high-resolution image,' but the precise weighting or normalization used in the final compounding step is not stated explicitly.
- [Figures] Figure captions and axis labels in the phantom results should include error bars or standard-deviation overlays when quantitative image-quality metrics are presented.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of validation for the EMC2 motion-compensation pipeline. We address each major comment below and will incorporate clarifications and additional quantitative support in the revised version where feasible.
read point-by-point responses
-
Referee: [Results (beating heart phantom experiments)] Results section on the beating-heart phantom: the central claim of 'full restoration' of motion-corrupted images rests on EMC2 accurately recovering displacement fields from the low-resolution READI sub-images, yet no registration-error metrics, residual-motion variance, or comparison against known ground-truth displacements are reported. Without these, it is impossible to verify that warping and summation do not re-introduce blur or coherent artifacts for the non-rigid, rapid motion present in the phantom.
Authors: We agree that quantitative registration-error metrics would provide stronger support for the 'full restoration' claim. The current manuscript presents the primary evidence through side-by-side visual comparisons showing recovery of tissue speckle texture and boundary continuity in the beating-heart phantom after EMC2. These visuals demonstrate that compounding after alignment preserves high-frequency content better than uncompensated summation. In revision we will add displacement-field error statistics from controlled simulations matching the phantom's motion range and, where possible, residual speckle decorrelation metrics on the real data to quantify any re-introduced blur. revision: partial
-
Referee: [Methods (EMC2)] Methods description of EMC2: the motion-estimation step is described as comparing low-resolution READI sub-images, but the manuscript provides neither the specific registration algorithm nor quantitative validation of its accuracy on the reduced-SNR, limited-support sub-images that result from disjoint Hadamard subsets. This assumption is load-bearing for the claim that EMC2 restores images without introducing new artifacts.
Authors: The referee is correct that the exact registration implementation and its validation on the low-resolution sub-images are not specified. READI sub-images are formed from complementary Hadamard subsets and retain sufficient spatial support and SNR for pairwise motion estimation via normalized cross-correlation block matching with sub-pixel refinement. We will expand the Methods section to name the algorithm, list its parameters (block size, search range), and include a new quantitative validation subsection reporting endpoint error on both simulated motion fields and additional phantom acquisitions with known probe translations. revision: yes
Circularity Check
No circularity: method is an algorithmic pipeline validated experimentally, not a derivation reducing to its inputs
full rationale
The paper describes READI as a recursive decoding and beamforming process that generates low-resolution sub-images from Hadamard sequence subsets, which are then aligned via EMC2 motion estimation (comparing sub-images) and compounded. No equations define a quantity in terms of itself, no parameters are fitted to a subset and then relabeled as a prediction of a related quantity, and no uniqueness theorems or ansatzes are imported via self-citation to force the result. The central claims rest on phantom experiments showing restored speckle and boundaries rather than on a closed mathematical loop. This is a standard self-contained engineering pipeline with independent empirical support.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Hadamard-encoded transmit sequences produce additive synthetic aperture data when decoded.
- domain assumption Motion between sub-images is small and can be approximated by rigid or affine warping.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat inductive structure and embed from generator orbit echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
the rank N Hadamard matrix can be expressed as a Kronecker product of rank S and Q matrices, provided S and Q are both powers of two... break the data into S sequential groups of Q transmissions... READI with Q=8, S=16
-
IndisputableMonolith/Foundation (headline theorem)reality_from_one_distinction (8-tick period) echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
Hadamard matrix... recursive Sylvester definition... groups of 8 transmits
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Synthetic aperture ultrasound imaging,
J. A. Jensen, S. I. Nikolov, K. L. Gammelmark, and M. H. Pedersen, “Synthetic aperture ultrasound imaging,”Ultrasonics, vol. 44, pp. e5–e15, 2006, proceedings of Ultrasonics International (UI’05) and World Congress on Ultrasonics (WCU). [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0041624X06003374
work page 2006
-
[2]
S. I. Nikolov,Synthetic aperture tissue and flow ultrasound imaging. Center for Fast Ultrasound Imaging, Technical University of Denmark Lyngby, 2002
work page 2002
-
[3]
Effects of motion on a synthetic aperture beamformer for real-time 3d ultrasound,
C. Hazard and G. Lockwood, “Effects of motion on a synthetic aperture beamformer for real-time 3d ultrasound,” in1999 IEEE Ultrasonics Sym- posium. Proceedings. International Symposium (Cat. No.99CH37027), vol. 2, 1999, pp. 1221–1224 vol.2
work page 1999
-
[4]
Fast orthogonal row–column electronic scanning with top-orthogonal-to-bottom electrode arrays,
C. Ceroici, T. Harrison, and R. J. Zemp, “Fast orthogonal row–column electronic scanning with top-orthogonal-to-bottom electrode arrays,” IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Con- trol, vol. 64, no. 6, pp. 1009–1014, 2017
work page 2017
-
[5]
Top-orthogonal-to-bottom-electrode (tobe) cmut arrays for 3-d ultra- sound imaging,
A. Sampaleanu, P. Zhang, A. Kshirsagar, W. Moussa, and R. J. Zemp, “Top-orthogonal-to-bottom-electrode (tobe) cmut arrays for 3-d ultra- sound imaging,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 61, no. 2, pp. 266–276, 2014
work page 2014
-
[6]
R. Palamar, M. R. Sobhani, D. Dahunsi, N. Majidi, A. K. Ilkhechi, J. Wang, J. Brown, and R. Zemp, “Bias-switchable row-column array imaging using fast orthogonal row-column electronic scanning (forces) compared with conventional row-column array imaging,”arXiv preprint, 2025. [Online]. Available: https://arxiv.org/abs/2506.10958
-
[7]
Field: A program for simulating ultrasound systems,
J. A. Jensen, “Field: A program for simulating ultrasound systems,” inProceedings of the 10th Nordic-Baltic Conference on Biomedical Imaging, vol. 34, no. Supplement 1, Part 1, 1996, pp. 351–353
work page 1996
-
[8]
J. A. Jensen and N. B. Svendsen, “Calculation of pressure fields from arbitrarily shaped, apodized, and excited ultrasound transducers,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 39, pp. 262–267, 1992. HENRYet al.: RECURSIVE APERTURE DECODED ULTRASOUND IMAGING (READI) WITH ESTIMATED MOTION-COMPENSATED COMPOUNDING (EMC2) 13
work page 1992
-
[9]
M. R. Sobhani, M. Ghavami, A. K. Ilkhechi, J. Brown, and R. Zemp, “Ultrafast orthogonal row–column electronic scanning (uforces) with bias-switchable top-orthogonal-to-bottom electrode 2-d arrays,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 69, no. 10, pp. 2823–2836, 2022
work page 2022
-
[10]
Characteristics of relaxor-based piezoelec- tric single crystals for ultrasonic transducers,
S.-E. Park and T. Shrout, “Characteristics of relaxor-based piezoelec- tric single crystals for ultrasonic transducers,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 44, no. 5, pp. 1140–1147, 1997
work page 1997
-
[11]
Synthetic aperture imaging for small scale systems,
M. Karaman, P.-C. Li, and M. O’Donnell, “Synthetic aperture imaging for small scale systems,”IEEE Transactions on Ultrasonics, Ferro- electrics, and Frequency Control, vol. 42, no. 3, pp. 429–442, 1995
work page 1995
-
[12]
So you think you can das? a viewpoint on delay-and-sum beamforming,
V. Perrot, M. Polichetti, F. Varray, and D. Garcia, “So you think you can das? a viewpoint on delay-and-sum beamforming,” Ultrasonics, vol. 111, p. 106309, 2021. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0041624X20302444
work page 2021
-
[13]
Recovery of the complete data set from focused transmit beams,
N. Bottenus, “Recovery of the complete data set from focused transmit beams,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Fre- quency Control, vol. 65, no. 1, pp. 30–38, 2018
work page 2018
-
[14]
Hadamard matrices and their applica- tions,
A. Hedayat and W. D. Wallis, “Hadamard matrices and their applica- tions,”The Annals of Statistics, vol. 6, no. 6, pp. 1184–1238, Nov. 1978
work page 1978
- [15]
- [16]
- [17]
- [18]
-
[19]
L. Marple, “Computing the discrete-time "analytic" signal via fft,”IEEE Transactions on Signal Processing, vol. 47, no. 9, pp. 2600–2603, 1999
work page 1999
-
[20]
A dynamic generalized coherence factor for side lobe suppression in ultrasound imaging,
Y. Wang, H. Peng, C. Zheng, Z. Han, and H. Qiao, “A dynamic generalized coherence factor for side lobe suppression in ultrasound imaging,”Computers in Biology and Medicine, vol. 116, p. 103522, 2020. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S0010482519303828
work page 2020
-
[21]
Two-dimensional spatial compounding with warping,
A. R. Groves and R. N. Rohling, “Two-dimensional spatial compounding with warping,”Ultrasound in Medicine & Biology, vol. 30, no. 7, pp. 929–942, 2004. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S0301562904001504
work page 2004
-
[22]
On quadratic interpolation of image cross-correlation for subpixel motion extraction,
B. Xiong, Q. Zhang, and V. Baltazart, “On quadratic interpolation of image cross-correlation for subpixel motion extraction,”Sensors, vol. 22, no. 3, 2022. [Online]. Available: https://www.mdpi.com/ 1424-8220/22/3/1274
work page 2022
-
[23]
A comparison of the performance of time-delay estimators in medical ultrasound,
F. Viola and W. Walker, “A comparison of the performance of time-delay estimators in medical ultrasound,”IEEE Transactions on Ultrasonics, Ferroelectrics,andFrequencyControl,vol.50,no.4,pp.392–401,2003
work page 2003
-
[24]
The generalized contrast- to-noise ratio: A formal definition for lesion detectability,
A. Rodriguez-Molares, O. M. H. Rindal, J. D’hooge, S.-E. Måsøy, A. Austeng, M. A. Lediju Bell, and H. Torp, “The generalized contrast- to-noise ratio: A formal definition for lesion detectability,”IEEE Trans- actions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 67, no. 4, pp. 745–759, 2020
work page 2020
-
[25]
Eigen-based clutter filter design for ultra- sound color flow imaging: a review,
A. C. Yu and L. Lovstakken, “Eigen-based clutter filter design for ultra- sound color flow imaging: a review,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 57, no. 5, pp. 1096–1111, 2010
work page 2010
-
[26]
Motion estimation in ultrasound images using time domain cross correlation with prior estimates,
R. Zahiri-Azar and S. Salcudean, “Motion estimation in ultrasound images using time domain cross correlation with prior estimates,”IEEE TransactionsonBiomedicalEngineering,vol.53,no.10,pp.1990–2000, 2006
work page 1990
-
[27]
Žiga Snoj, G. Omejec, J. Javh, and N. Umek, “Ultrasound speckle tracking method based on gradient optical flow to quantify small longitudinal displacement, shear and longitudinal strain in peripheral nerves,”Ultrasound in Medicine & Biology, vol. 51, no. 2, pp. 280–287, 2025. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S0301562...
work page 2025
-
[28]
J. Baranger, B. Arnal, F. Perren, O. Baud, M. Tanter, and C. Demené, “Adaptive spatiotemporal svd clutter filtering for ultrafast doppler imag- ing using similarity of spatial singular vectors,”IEEE Transactions on Medical Imaging, vol. 37, no. 7, pp. 1574–1586, 2018
work page 2018
-
[29]
5.05 - blood flow measurement,
T. Tamura, “5.05 - blood flow measurement,” inComprehensive Biomedical Physics, A. Brahme, Ed. Oxford: Elsevier, 2014, pp. 91–
work page 2014
-
[30]
Available: https://www.sciencedirect.com/science/article/ pii/B9780444536327005116
[Online]. Available: https://www.sciencedirect.com/science/article/ pii/B9780444536327005116
-
[31]
D. O. Dahunsi, R. Palmar, T. Henry, M. R. Sobhani, N. Majidi, J. Wang, A. K. Ilkhechi, J. Brown, and R. Zemp, “Hadamard encoded row column ultrasonic expansive scanning (hercules) with bias-switchable row-column arrays,” 2025. [Online]. Available: https: //arxiv.org/abs/2506.11443
-
[32]
Efficacy of ultrasound vector flow imaging in tracking omnidirectional pulsatile flow,
J. Haniel, B. Y. S. Yiu, A. J. Y. Chee, R. Huebner, and A. C. H. Yu, “Efficacy of ultrasound vector flow imaging in tracking omnidirectional pulsatile flow,”Medical Physics, vol. 50, no. 3, pp. 1699–1714,
-
[33]
Available: https://aapm.onlinelibrary.wiley.com/doi/abs/ 10.1002/mp.16168
[Online]. Available: https://aapm.onlinelibrary.wiley.com/doi/abs/ 10.1002/mp.16168
-
[34]
Directional transverse oscillation vector flow estimation,
J. A. Jensen, “Directional transverse oscillation vector flow estimation,” IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Con- trol, vol. 64, no. 8, pp. 1194–1204, 2017
work page 2017
-
[35]
Shear- wave elastography: Basic physics and musculoskeletal applications,
M. S. Taljanovic, L. H. Gimber, G. W. Becker, L. D. Latt, A. S. Klauser, D. M. Melville, L. Gao, and R. S. Witte, “Shear- wave elastography: Basic physics and musculoskeletal applications,” Radiographics, vol. 37, no. 3, pp. 855–870, 2017. [Online]. Available: https://doi.org/10.1148/rg.2017160116
-
[36]
Z. Dong, U.-W. Lok, M. R. Lowerison, C. Huang, S. Chen, and P. Song, “Three-dimensional shear wave elastography using acoustic radiation force and a 2-d row-column addressing (rca) array,”IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 71, no. 4, pp. 448–458, 2024. 14 IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQ...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.