Zero to Autonomy in Real-Time: Online Adaptation of Dynamics in Unstructured Environments
Pith reviewed 2026-05-18 15:37 UTC · model grok-4.3
The pith
Robots adapt to new dynamics in seconds by updating function encoder coefficients with recursive least squares from streaming odometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Treating function encoder coefficients as latent states and updating them via recursive least squares from streaming odometry yields constant-time coefficient estimation. This produces stable, accurate dynamics models from only a few seconds of data, which in turn improve downstream planning and reduce collisions relative to static and meta-learning baselines across a Van der Pol oscillator, Unity simulator navigation tasks, and real-robot trials on ice.
What carries the argument
Function encoder coefficients treated as latent states and estimated in constant time by recursive least squares updates driven by streaming odometry.
If this is right
- Constant-time updates remove the need for slow inner-loop optimization, enabling real-time response to dynamics shifts.
- More accurate online models lead to safer trajectory planning in environments with sudden changes such as ice.
- Adaptation from seconds of data allows recovery from zero-knowledge states without pre-collected datasets.
- The same pipeline works across simulated oscillators, high-fidelity simulators, and physical robots.
Where Pith is reading between the lines
- The latent-state treatment of encoder coefficients could be combined with other filtering methods for even faster convergence in noisy conditions.
- Extending the approach to aerial or legged platforms would test whether the constant-time property holds when dynamics involve more degrees of freedom.
- Integration with uncertainty-aware planners might further reduce collisions by explicitly accounting for estimation error during the first seconds of adaptation.
Load-bearing premise
Recursive least squares updates applied to function encoder coefficients will produce dynamics models stable and accurate enough to improve planning and reduce collisions when the robot encounters abrupt terrain changes.
What would settle it
Running the Clearpath Jackal on the ice rink terrain and finding no reduction in collisions or model accuracy relative to a static baseline would falsify the claim that the online adaptation improves performance.
Figures







read the original abstract
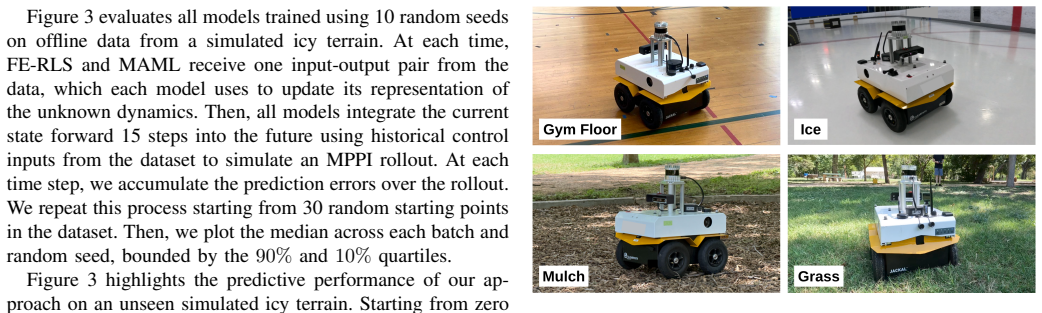
Autonomous robots must go from zero prior knowledge to safe control within seconds to operate in unstructured environments. Abrupt terrain changes, such as a sudden transition to ice, create dynamics shifts that can destabilize planners unless the model adapts in real-time. We present a method for online adaptation that combines function encoders with recursive least squares, treating the function encoder coefficients as latent states updated from streaming odometry. This yields constant-time coefficient estimation without gradient-based inner-loop updates, enabling adaptation from only a few seconds of data. We evaluate our approach on a Van der Pol system to highlight algorithmic behavior, in a Unity simulator for high-fidelity off-road navigation, and on a Clearpath Jackal robot, including on a challenging terrain at a local ice rink. Across these settings, our method improves model accuracy and downstream planning, reducing collisions compared to static and meta-learning baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a method for online adaptation of robot dynamics models in unstructured environments. It combines function encoders with recursive least squares (RLS), treating the encoder coefficients as latent states that are updated in constant time from streaming odometry. This avoids gradient-based inner-loop optimization and enables adaptation from only a few seconds of data. The approach is evaluated on the Van der Pol oscillator to illustrate behavior, in a Unity simulator for high-fidelity off-road navigation, and on a Clearpath Jackal robot operating on challenging ice-rink terrain. Results claim improved model accuracy, better downstream planning performance, and reduced collisions relative to static and meta-learning baselines.
Significance. If the empirical results hold under the stated conditions, the work provides a computationally lightweight alternative to gradient-based meta-learning for real-time dynamics adaptation. The constant-time RLS update and multi-domain evaluation (simulation to hardware) address a practical gap in deploying robots under abrupt terrain changes. Explicit credit is due for the reproducible experimental protocol across three settings and the avoidance of inner-loop gradients.
major comments (2)
- [§4.3] §4.3 (Real-robot experiments on the Jackal): the reported collision reduction on ice is presented as evidence that RLS coefficient updates produce stable, accurate models sufficient for improved planning. However, the manuscript provides no analysis of persistent excitation of the regressor, sensitivity to the forgetting factor, or numerical stability under wheel-slip and abrupt friction changes. Without such checks or an ablation, it is difficult to attribute the performance gain specifically to the adaptation mechanism rather than implementation details or tuning.
- [§3] §3 (Method description): the claim that treating function-encoder coefficients as latent states and applying standard RLS yields reliable online adaptation rests on the usual RLS assumptions (persistent excitation, bounded noise). The paper does not supply a convergence bound or stability argument tailored to the robotics setting, which is load-bearing for the central claim that adaptation occurs safely within seconds in unstructured environments.
minor comments (2)
- The abstract states improvements 'across these settings' but does not include even a single quantitative summary statistic (e.g., mean collision count or model-error reduction). Adding one or two such numbers would strengthen the summary.
- [§3] Notation for the function-encoder basis and the RLS covariance update should be cross-referenced to the equations in §3 to avoid ambiguity when readers compare the method to standard RLS formulations.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our online adaptation method. We address each major point below and outline targeted revisions.
read point-by-point responses
-
Referee: [§4.3] §4.3 (Real-robot experiments on the Jackal): the reported collision reduction on ice is presented as evidence that RLS coefficient updates produce stable, accurate models sufficient for improved planning. However, the manuscript provides no analysis of persistent excitation of the regressor, sensitivity to the forgetting factor, or numerical stability under wheel-slip and abrupt friction changes. Without such checks or an ablation, it is difficult to attribute the performance gain specifically to the adaptation mechanism rather than implementation details or tuning.
Authors: We agree that additional analysis would strengthen attribution of gains to the adaptation mechanism. In revision we will add a discussion of persistent excitation using the Jackal's recorded trajectories, a sensitivity plot for the forgetting factor, and numerical stability observations (e.g., covariance conditioning) during wheel-slip events on ice. An ablation varying the forgetting factor will also be included to demonstrate robustness. revision: yes
-
Referee: [§3] §3 (Method description): the claim that treating function-encoder coefficients as latent states and applying standard RLS yields reliable online adaptation rests on the usual RLS assumptions (persistent excitation, bounded noise). The paper does not supply a convergence bound or stability argument tailored to the robotics setting, which is load-bearing for the central claim that adaptation occurs safely within seconds in unstructured environments.
Authors: We acknowledge that a custom convergence bound is absent. The method inherits standard RLS assumptions; we will revise §3 to state these assumptions explicitly and explain their satisfaction via the observed rapid adaptation in the Van der Pol, Unity, and hardware experiments. A brief paragraph will be added linking empirical convergence times to the robotics setting, with a note that a full theoretical analysis remains future work. revision: partial
Circularity Check
No circularity: standard RLS update on function-encoder coefficients is independent of target claims
full rationale
The paper's core derivation treats function-encoder coefficients as latent states and applies recursive least squares to streaming odometry for constant-time adaptation. This is a direct, standard application of RLS with no evidence that any prediction or result is obtained by construction from the inputs, no self-definitional loops, and no load-bearing self-citations that reduce the central claim to prior work by the same authors. Empirical evaluations on Van der Pol, Unity, and the Jackal robot compare against static and meta-learning baselines without the adaptation mechanism being tautological. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Function encoder coefficients can be treated as latent states that are updated from streaming odometry without gradient-based inner-loop optimization.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We present a method for online adaptation that combines function encoders with recursive least squares, treating the function encoder coefficients as latent states updated from streaming odometry.
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
FE-RLS rapidly converges to an accurate dynamics representation within ≈5 seconds after μ changes
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Zero-Shot Function Encoder-Based Differentiable Predictive Control
A differentiable framework integrates function encoder-based neural ODEs with predictive control to enable zero-shot adaptation of explicit policies across families of nonlinear systems.
Reference graph
Works this paper leans on
-
[1]
SE3-Pose-Nets: Structured deep dynamics models for visuomotor control
Arunkumar Byravan, Felix Leeb, Franziska Meier, and Dieter Fox. SE3-Pose-Nets: Structured deep dynamics models for visuomotor control. InInternational Confer- ence on Robotics and Automation, 2018
work page 2018
-
[2]
Kenny Chen, Ryan Nemiroff, and Brett T Lopez. Di- rect LiDAR-inertial odometry: Lightweight LIO with continuous-time motion correction.International Con- ference on Robotics and Automation, 2023
work page 2023
-
[3]
Neural ordinary differential equations.Advances in neural information processing systems, 2018
Ricky TQ Chen, Yulia Rubanova, Jesse Bettencourt, and David K Duvenaud. Neural ordinary differential equations.Advances in neural information processing systems, 2018
work page 2018
-
[4]
James Dallas, Kshitij Jain, Zheng Dong, Leonid Sapronov, Michael P Cole, Paramsothy Jayakumar, and Tulga Ersal. Online terrain estimation for autonomous vehicles on deformable terrains.Journal of Terrame- chanics, 91:11–22, 2020
work page 2020
-
[5]
Autonomous drifting with 3 minutes of data via learned tire models
Franck Djeumou, Jonathan YM Goh, Ufuk Topcu, and Avinash Balachandran. Autonomous drifting with 3 minutes of data via learned tire models. InInternational Conference on Robotics and Automation, 2023
work page 2023
-
[6]
Franck Djeumou, Cyrus Neary, and Ufuk Topcu. How to learn and generalize from three minutes of data: Physics- constrained and uncertainty-aware neural stochastic dif- ferential equations. InConference on Robot Learning, 2023
work page 2023
-
[7]
Vehicle- terrain parameter estimation for small-scale unmanned tracked vehicles
Albert A Espinoza, Jorge L Torres-Filomeno, Karla M Monta˜nez-S´anchez, and ´Angel J Ortiz-And ´ujar. Vehicle- terrain parameter estimation for small-scale unmanned tracked vehicles. InInternational Symposium on Mea- surement and Control in Robotics, 2019
work page 2019
-
[8]
Model- agnostic meta-learning for fast adaptation of deep net- works
Chelsea Finn, Pieter Abbeel, and Sergey Levine. Model- agnostic meta-learning for fast adaptation of deep net- works. InInternational conference on machine learning, 2017
work page 2017
-
[9]
Learning nonlinear dynamic models of soft robots for model predictive con- trol with neural networks
Morgan T Gillespie, Charles M Best, Eric C Townsend, David Wingate, and Marc D Killpack. Learning nonlinear dynamic models of soft robots for model predictive con- trol with neural networks. InInternational Conference on Soft Robotics, 2018
work page 2018
-
[10]
Tyler Ingebrand, Adam J. Thorpe, and Ufuk Topcu. Zero- shot transfer of neural ODEs. InAdvances in Neural Information Processing Systems, 2024
work page 2024
-
[11]
Zero- shot reinforcement learning via function encoders
Tyler Ingebrand, Amy Zhang, and Ufuk Topcu. Zero- shot reinforcement learning via function encoders. In International Conference on Machine Learning, 2024
work page 2024
-
[12]
Tyler Ingebrand, Adam J. Thorpe, and Ufuk Topcu. Function encoders: A principled approach to transfer learning in hilbert spaces. InInternational Conference on Machine Learning, 2025
work page 2025
-
[13]
RMA: rapid motor adaptation for legged robots
Ashish Kumar, Zipeng Fu, Deepak Pathak, and Jitendra Malik. RMA: rapid motor adaptation for legged robots. InRobotics: Science and Systems, 2021
work page 2021
-
[14]
Yuankai Li, Liang Ding, Zhizhong Zheng, Qizhi Yang, Xingang Zhao, and Guangjun Liu. A multi-mode real- time terrain parameter estimation method for wheeled motion control of mobile robots.Mechanical Systems and Signal Processing, 2018
work page 2018
-
[15]
Learning on the job: Online lifelong and continual learning
Bing Liu. Learning on the job: Online lifelong and continual learning. InAAAI conference on artificial intelligence, 2020
work page 2020
-
[16]
A lifelong learning approach to mobile robot navigation.Robotics and Automation Letters, 2021
Bo Liu, Xuesu Xiao, and Peter Stone. A lifelong learning approach to mobile robot navigation.Robotics and Automation Letters, 2021
work page 2021
-
[17]
Xiaobo Nie, Chuan Min, Yongjun Pan, Ke Li, and Zhixiong Li. Deep-neural-network-based modelling of longitudinal-lateral dynamics to predict the vehicle states for autonomous driving.Sensors, 2022
work page 2022
-
[18]
Kendric Ortiz, Rachel DiPirro, Adam J. Thorpe, and Meeko Oishi. Online learning of dynamical systems using low-rank updates to physics-informed kernel dis- tribution embeddings. InConference on Decision and Control, 2024
work page 2024
-
[19]
Chandramouli Padmanabhan, Sayan Gupta, Annadurai Mylswamy, et al. Estimation of terramechanics pa- rameters of wheel-soil interaction model using particle filtering.Journal of Terramechanics, 2018
work page 2018
-
[20]
Jesse Pentzer, Sean Brennan, and Karl Reichard. On- line estimation of vehicle motion and power model parameters for skid-steer robot energy use prediction. In American Control Conference, 2014
work page 2014
-
[21]
Giulio Reina, Antonio Leanza, and Arcangelo Messina. Terrain estimation via vehicle vibration measurement and cubature Kalman filtering.Journal of Vibration and Control, 2020
work page 2020
-
[22]
Neural network vehicle models for high-performance automated driving.Science robotics, 2019
Nathan A Spielberg, Matthew Brown, Nitin R Kapania, John C Kegelman, and J Christian Gerdes. Neural network vehicle models for high-performance automated driving.Science robotics, 2019
work page 2019
-
[23]
Omnimapper: A modular multimodal map- ping framework
Alexander JB Trevor, John G Rogers, and Henrik I Christensen. Omnimapper: A modular multimodal map- ping framework. In2014 IEEE international conference on robotics and automation (ICRA), pages 1983–1990. IEEE, 2014
work page 1983
-
[24]
Gaus- sian process dynamical models
Jack Wang, Aaron Hertzmann, and David J Fleet. Gaus- sian process dynamical models. InAdvances in Neural Information Processing Systems, 2005
work page 2005
-
[25]
Online adaptation of terrain-aware dynamics for planning in unstructured environments
William Ward, Sarah Etter, Tyler Ingebrand, Christian Ellis, Adam Thorpe, and Ufuk Topcu. Online adaptation of terrain-aware dynamics for planning in unstructured environments. InRobotics: Science and Systems Work- shop on Resilient Off-road Autonomous Robotics, 2025
work page 2025
-
[26]
Information theoretic MPC for model-based reinforcement learning
Grady Williams, Nolan Wagener, Brian Goldfain, Paul Drews, James Rehg, Byron Boots, and Evangelos Theodorou. Information theoretic MPC for model-based reinforcement learning. InInternational Conference on Robotics and Automation, 2017
work page 2017
-
[27]
Grady Williams, Paul Drews, Brian Goldfain, James Rehg, and Evangelos Theodorou. Information-theoretic model predictive control: Theory and applications to autonomous driving.Transactions on Robotics, 2018
work page 2018
-
[28]
Hyperdy- namics: Meta-learning object and agent dynamics with hypernetworks
Zhou Xian, Shamit Lal, Hsiao-Yu Tung, Emmanouil An- tonios Platanios, and Katerina Fragkiadaki. Hyperdy- namics: Meta-learning object and agent dynamics with hypernetworks. InInternational Conference on Learning Representations, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.