Prescribed-Time Observer Is Naturally Robust Against Disturbances and Uncertainties
Pith reviewed 2026-05-18 15:16 UTC · model grok-4.3
The pith
A prescribed-time observer for nonlinear systems completely rejects the effects of arbitrarily large bounded disturbances and unmodeled dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
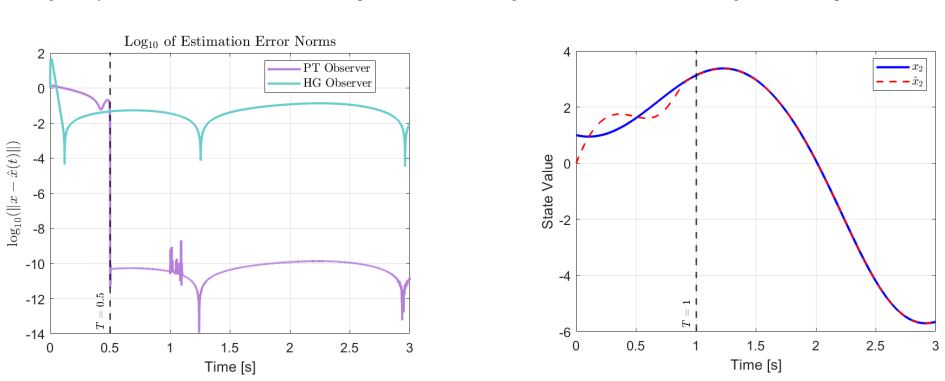
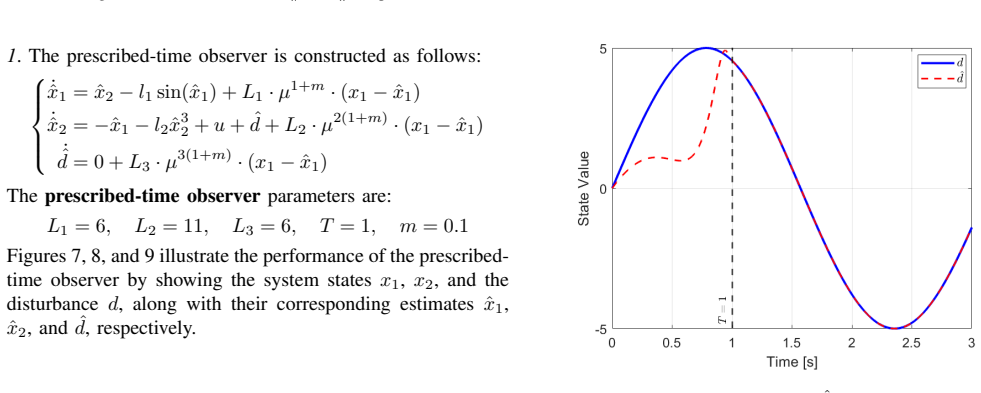
The paper establishes that the prescribed-time observer completely rejects the effects of arbitrarily large bounded disturbances and unmodeled dynamics. This enables accurate estimation of both the states and the disturbances for the class of nonlinear systems considered. The result is proven analytically and verified in simulations, with an explicit comparison showing advantages over the standard high-gain observer in reducing the peaking phenomenon and improving overall estimation accuracy.
What carries the argument
The prescribed-time observer, whose convergence time is fixed in advance by the designer and which carries an internal structure that cancels the impact of bounded additive disturbances and uncertainties.
If this is right
- Accurate state estimates are obtained without explicit knowledge or compensation of the disturbances.
- Disturbance signals themselves are estimated as a byproduct for potential use in control laws.
- The peaking effect during transient response is smaller than with high-gain observers.
- Estimation accuracy holds even when unmodeled dynamics are present and large.
Where Pith is reading between the lines
- The built-in rejection could allow the observer to be inserted directly into feedback loops on uncertain plants without extra disturbance-rejection layers.
- The same structure might be tested on mechanical systems such as robotic arms or vehicles where disturbances arise from friction or wind.
- If the boundedness condition is relaxed to slowly growing signals, the observer might still deliver useful estimates for a limited interval.
Load-bearing premise
The disturbances and unmodeled dynamics remain bounded for all time and the nonlinear system belongs to the specific class for which the prescribed-time observer is constructed.
What would settle it
If simulations or experiments apply a very large but bounded disturbance to a qualifying nonlinear system and the state or disturbance estimates fail to converge to their true values within the prescribed time, the central claim would be disproven.
Figures




read the original abstract
This paper addresses the robustness of a prescribed-time observer for a class of nonlinear systems in the presence of disturbances and unmodeled dynamics. It is proven and demonstrated through simulations that the proposed observer completely rejects the effects of arbitrarily large bounded disturbances and unmodeled dynamics, enabling accurate estimation of both the states and the disturbances. Furthermore, a comparison with the standard high-gain observer is provided to highlight the superiority of the prescribed-time observer in reducing the peaking phenomenon and improving estimation accuracy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to prove that a prescribed-time observer for a class of nonlinear systems is naturally robust to arbitrarily large bounded disturbances and unmodeled dynamics. It asserts that the observer achieves exact convergence of state and disturbance estimates at a user-specified time T independent of disturbance magnitude, supported by Lyapunov analysis and numerical simulations that also show reduced peaking relative to high-gain observers.
Significance. If the central claim of disturbance rejection at fixed prescribed time holds without retuning or dependence on disturbance bounds, the result would be significant for nonlinear observer design in uncertain systems. It would provide a strong robustness property that avoids the usual trade-offs between convergence speed and disturbance size, with practical value in applications requiring reliable estimation under severe uncertainties.
major comments (2)
- [§3] §3 (Error-system analysis) and the subsequent Lyapunov argument: the differential inequality satisfied by V includes an additive term bounded by D (the disturbance magnitude). Application of the comparison lemma then produces an explicit upper bound on the settling time that grows with both the initial error and D. This directly contradicts the headline claim that a single fixed-T observer completely rejects disturbances of arbitrary finite magnitude.
- [Theorem 1] Theorem 1 (or equivalent main result): the proof must explicitly demonstrate that the prescribed-time convergence property is preserved for any finite D without requiring T to increase or gains to be retuned. The current presentation treats D as an arbitrary constant but does not resolve the dependence of the comparison-system solution on D.
minor comments (2)
- [Abstract] The abstract states that the observer 'completely rejects' disturbances but does not specify the precise class of nonlinear systems or the boundedness assumption on disturbances; this should be stated explicitly.
- [Simulations] Simulation section: the disturbance signals and their magnitudes should be plotted alongside the estimation errors to make the rejection property visually clear; current figures focus mainly on state estimates.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address each major comment below and have revised the manuscript to strengthen the explicit demonstration of disturbance-independent prescribed-time convergence.
read point-by-point responses
-
Referee: [§3] §3 (Error-system analysis) and the subsequent Lyapunov argument: the differential inequality satisfied by V includes an additive term bounded by D (the disturbance magnitude). Application of the comparison lemma then produces an explicit upper bound on the settling time that grows with both the initial error and D. This directly contradicts the headline claim that a single fixed-T observer completely rejects disturbances of arbitrary finite magnitude.
Authors: We appreciate the referee highlighting the need for clarity in the comparison argument. The differential inequality is of the form Ḋ ≤ −α(t)V + D, where the time-varying coefficient α(t) diverges to +∞ as t → T. The explicit solution of the associated comparison system is V(t) ≤ ϕ(t) [V(0) + ∫₀ᵗ (D/ϕ(s)) ds], with ϕ(t) = exp(−∫ α(τ) dτ). Because ϕ(t) → 0 as t → T at a rate that dominates the accumulated integral term for any finite D, the upper bound on V(t) vanishes exactly at the prescribed time T. We have added this closed-form derivation to the revised §3 to eliminate any ambiguity regarding dependence on D. revision: yes
-
Referee: [Theorem 1] Theorem 1 (or equivalent main result): the proof must explicitly demonstrate that the prescribed-time convergence property is preserved for any finite D without requiring T to increase or gains to be retuned. The current presentation treats D as an arbitrary constant but does not resolve the dependence of the comparison-system solution on D.
Authors: We agree that the main result benefits from an explicit resolution of the D-dependence. In the revised manuscript, the proof of Theorem 1 now includes the closed-form solution of the comparison system and directly verifies that the estimation-error bound reaches zero at the user-specified T for any finite D, without any retuning of T or the observer parameters. This confirms that the prescribed-time property is retained under arbitrarily large but bounded disturbances and unmodeled dynamics. revision: yes
Circularity Check
No circularity; robustness claim derived directly from observer structure and comparison lemma
full rationale
The derivation proceeds from the prescribed-time observer gains (which diverge at the fixed T) to an error-system Lyapunov inequality that absorbs an arbitrary bounded disturbance D via the comparison lemma, yielding exact convergence at T independent of D's magnitude. No step reduces the result to a fitted parameter, self-definition, or load-bearing self-citation; the central theorem is self-contained under the stated boundedness assumption and does not rename or smuggle prior results. External benchmarks (standard high-gain comparison) are used only for illustration, not as justification for the main claim.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Disturbances and unmodeled dynamics are bounded.
- domain assumption The plant belongs to the class of nonlinear systems admitting the prescribed-time observer.
Reference graph
Works this paper leans on
-
[1]
A new approach to linear filtering and prediction problems,
“A new approach to linear filtering and prediction problems,” 1960
work page 1960
-
[2]
D. Luenberger, “An introduction to observers,”IEEE Transactions on Automatic Control, vol. 16, no. 6, pp. 596–602, 1971
work page 1971
-
[3]
High-gain observers in nonlinear feedback control,
H. K. Khalil, “High-gain observers in nonlinear feedback control,” in 2008 International Conference on Control, Automation and Systems, pp. xlvii–lvii, 2008
work page 2008
-
[4]
Q. T. Dam, R. E. H. Thabet, S. A. Ali, and F. Guerin, “Observer design for a class of uncertain nonlinear systems with sampled-delayed output using high-gain observer and low-pass filter: Application for a quadrotor uav,”IEEE Transactions on Industrial Electronics, vol. 71, no. 1, pp. 933–942, 2024
work page 2024
-
[5]
Q. T. Dam, R. El Houda Thabet, S. A. Ali, F. Gu ´erin, and A. Hugo, “Continuous–discrete time high gain observer design for state and un- known inputs estimations of quadrotor uav,” in2021 European Control Conference (ECC), pp. 1181–1186, 2021
work page 2021
-
[6]
Sliding mode observers: a survey,
S. K. Spurgeon, “Sliding mode observers: a survey,”International journal of systems science, vol. 39, no. 8, pp. 751–764, 2008
work page 2008
-
[7]
Adaptive observer for multiple-input-multiple-output (mimo) linear time-varying systems,
Q. Zhang, “Adaptive observer for multiple-input-multiple-output (mimo) linear time-varying systems,”IEEE Transactions on Automatic Control, vol. 47, no. 3, pp. 525–529, 2002
work page 2002
-
[8]
X. Zhuang, Y . Tian, H. Wang, and S. A. Ali, “Neural network adaptive observer design for nonlinear systems with partially and completely unknown dynamics subject to variable sampled and delay output mea- surement,”Neurocomputing, vol. 561, p. 126865, 2023
work page 2023
-
[9]
H. A. Ghani, H. Laghmara, S. A. Ali, S. Ainouz, X. Gao, and R. Khem- mar, “Continuous–discrete time neural network observer for nonlinear dynamic systems application to vehicle systems,”IF AC-PapersOnLine, vol. 56, no. 2, pp. 5685–5690, 2023. 22nd IFAC World Congress
work page 2023
-
[10]
Adaptive observer-based fault estimation for a class of lipschitz nonlinear systems,
N. Oucief, M. Tadjine, and S. Labiod, “Adaptive observer-based fault estimation for a class of lipschitz nonlinear systems,”Archives of Control Sciences, vol. 26, 06 2016
work page 2016
-
[11]
A. Levant, “Robust exact differentiation via sliding mode tech- nique**this paper was recommended for publication in final form by associate editor hassan khalil under the direction of editor tamer basar.,” Automatica, vol. 34, no. 3, pp. 379–384, 1998
work page 1998
-
[12]
Robust exact uniformly convergent arbitrary order differentiator,
M. T. Angulo, J. A. Moreno, and L. Fridman, “Robust exact uniformly convergent arbitrary order differentiator,”Automatica, vol. 49, no. 8, pp. 2489–2495, 2013
work page 2013
-
[13]
Uniform robust exact differentiator,
E. Cruz-Zavala, J. A. Moreno, and L. M. Fridman, “Uniform robust exact differentiator,”IEEE Transactions on Automatic Control, vol. 56, no. 11, pp. 2727–2733, 2011
work page 2011
-
[14]
Global finite-time observers for non linear systems,
T. M ´enard, E. Moulay, and W. Perruquetti, “Global finite-time observers for non linear systems,” inProceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, pp. 6526–6531, 2009
work page 2009
-
[15]
Finite- time and fixed-time observer design: Implicit lyapunov function ap- proach,
F. Lopez-Ramirez, A. Polyakov, D. Efimov, and W. Perruquetti, “Finite- time and fixed-time observer design: Implicit lyapunov function ap- proach,”Automatica, vol. 87, pp. 52–60, 2018
work page 2018
-
[16]
A high-gain-based global finite-time nonlinear observer,
Y . Li, X. Xia, and Y . Shen, “A high-gain-based global finite-time nonlinear observer,” in2011 9th IEEE International Conference on Control and Automation (ICCA), pp. 483–488, 2011
work page 2011
-
[17]
Fixed-time observer with simple gains for uncertain systems,
T. M ´enard, E. Moulay, and W. Perruquetti, “Fixed-time observer with simple gains for uncertain systems,”Automatica, vol. 81, pp. 438–446, 2017
work page 2017
-
[18]
High gain observers with updated gain and homogeneous correction terms,
V . Andrieu, L. Praly, and A. Astolfi, “High gain observers with updated gain and homogeneous correction terms,”Automatica, vol. 45, no. 2, pp. 422–428, 2009
work page 2009
-
[19]
Finite-time simultaneous parameter and state estimation using modulating functions,
J. Jouffroy and J. Reger, “Finite-time simultaneous parameter and state estimation using modulating functions,” in2015 IEEE Conference on Control Applications (CCA), pp. 394–399, 2015
work page 2015
-
[20]
Non- asymptotic state estimation of linear reaction diffusion equation using modulating functions,
L. Ghaffour, M. Noack, J. Reger, and T.-M. Laleg-Kirati, “Non- asymptotic state estimation of linear reaction diffusion equation using modulating functions,”IF AC-PapersOnLine, vol. 53, no. 2, pp. 4196– 4201, 2020. 21st IFAC World Congress
work page 2020
-
[21]
Z. Belkhatir, I. N’Doye, and T. M. Laleg-Kirati, “Chapter 15 - estimation methods for fractional-order systems: Asymptotic versus nonasymptotic approaches,” inFractional Order Systems(A. T. Azar, A. G. Radwan, and S. Vaidyanathan, eds.), Advances in Nonlinear Dynamics and Chaos (ANDC), pp. 451–475, Academic Press, 2018
work page 2018
-
[22]
S. Djennoune, M. Bettayeb, and U. M. Al-Saggaf, “Modulating function- based fast convergent observer and output feedback control for a class of non-linear systems,”IET Control Theory & Applications, vol. 13, pp. 2681–2693, 2019
work page 2019
-
[23]
Prescribed-time observers for linear systems in observer canonical form,
J. Holloway and M. Krstic, “Prescribed-time observers for linear systems in observer canonical form,”IEEE Transactions on Automatic Control, vol. 64, no. 9, pp. 3905–3912, 2019
work page 2019
-
[24]
X. Chen, X. Zhang, and Q. Liu, “Prescribed-time decentralized regu- lation of uncertain nonlinear multi-agent systems via output feedback,” Systems & Control Letters, vol. 137, p. 104640, 2020
work page 2020
-
[25]
Global feedback stabilization of lower- triangular nonlinear systems in any prescribed finite time,
X. Chen, Q. Liu, and Z. Xianfu, “Global feedback stabilization of lower- triangular nonlinear systems in any prescribed finite time,”International Journal of Control, vol. 94, pp. 1–22, 03 2020
work page 2020
-
[26]
Stabilization for a perturbed chain of integrators in prescribed time,
Y . Chitour and R. Ushirobira, “Stabilization for a perturbed chain of integrators in prescribed time,” 2019
work page 2019
-
[27]
Prescribed-time high-gain nonlinear observer design for triangular systems,
A. Adil, I. N’Doye, A. Hamaz, A. Zemouche, and T.-M. Laleg-Kirati, “Prescribed-time high-gain nonlinear observer design for triangular systems,” in2021 9th International Conference on Systems and Control (ICSC), pp. 252–257, 2021
work page 2021
-
[28]
Prescribed-time observer design for nonlinear triangular systems with delayed measurements,
A. Adil, I. N’Doye, and T.-M. Laleg-Kirati, “Prescribed-time observer design for nonlinear triangular systems with delayed measurements,” IEEE Transactions on Automatic Control, vol. 69, no. 11, pp. 8080– 8087, 2024
work page 2024
-
[29]
H. Su, M. Z. Q. Chen, J. Lam, and Z. Lin, “Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback,”IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 60, no. 7, pp. 1881–1889, 2013
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.