On Fast Attitude Filtering Using Matrix Fisher Distributions with Stability Guarantee
Pith reviewed 2026-05-18 14:43 UTC · model grok-4.3
The pith
Closed-form attitude filters with matrix Fisher distributions and right-invariant errors achieve almost global asymptotic stability on SO(3).
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By preserving the two essential properties of MFD distribution evolution along Bayes' rule through linearized right-invariant error systems, the proposed filter iterates in closed form and represents uncertainty globally with MFDs, which enables the proof of almost global asymptotic stability for any trajectory on SO(3) and supports reliable convergence from large initial errors.
What carries the argument
Linearized error system with right-invariant errors applied to the matrix Fisher distribution (MFD) on SO(3), which enables closed-form iteration and supplies the global uncertainty representation used for the stability proofs.
If this is right
- The filter converges almost globally asymptotically for arbitrary initial conditions and any reference trajectory on SO(3).
- Local exponential stability holds for single-axis rotations, with convergence rate influenced by the retained distribution properties.
- Accuracy remains comparable to full Bayesian MFD filters under large uncertainties while computation time drops to roughly 1/5 to 1/100 of prior MFD implementations.
Where Pith is reading between the lines
- The stability result could support attitude control loops on spacecraft or UAVs that must recover from poor initial orientation estimates.
- The right-invariant linearization technique may extend to filtering problems on other compact Lie groups where directional statistics are used.
- Hardware experiments with real IMU data could test whether the predicted convergence rates hold outside simulation.
Load-bearing premise
The two essential properties of the MFD distribution evolution along Bayes' rule remain intact when the filter is approximated via linearized error systems with right-invariant errors.
What would settle it
A specific trajectory on SO(3) together with a large initial attitude error for which the filter state diverges instead of converging to the true attitude.
Figures





read the original abstract
This paper addresses two interrelated problems of the nonlinear filtering mechanism and fast attitude filtering with the matrix Fisher distribution (MFD) on the special orthogonal group. By analyzing the distribution evolution along Bayes' rule, we reveal two essential properties that enhance the performance of Bayesian attitude filters with MFDs, particularly in challenging conditions. Benefiting from the new understanding of the filtering mechanism associated with MFDs, two closed-form filters with MFDs are then proposed. These filters avoid the burdensome computations in previous MFD-based filters by introducing linearized error systems with right-invariant errors but retaining the two advantageous properties. The proposed filter with right-invariant error is proven to be almost globally asymptotically stable for any trajectory on $SO(3)$ leveraging its closed-form iteration and global uncertainty representation with MFDs. Moreover, we further prove the local exponential stability of the filter for single-axis rotations to reveal the effect of the two properties on the convergence rate. These stability results support the performance of the proposed filter with large initial error from a theoretical viewpoint, which to our knowledge, is not achieved by existing directional statistics-based filters. Numerical simulations demonstrate that proposed filters are as accurate as recent MFD-based Bayesian filters in challenging circumstances but consume far less computation time (about 1/5 to 1/100 of previous MFD-based attitude filters).
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript analyzes the evolution of Matrix Fisher Distributions (MFDs) along Bayes' rule on SO(3) to identify two essential properties that enhance Bayesian attitude filtering. It proposes two closed-form filters that employ linearized error systems with right-invariant errors to retain these properties while avoiding expensive computations of prior MFD filters. The right-invariant-error filter is proven almost globally asymptotically stable for arbitrary trajectories on SO(3), with an additional local exponential stability result for single-axis rotations; simulations show accuracy comparable to recent MFD-based filters at 1/5 to 1/100 the computation time.
Significance. If the stability transfer from the exact MFD case to the linearized implementation holds, the work supplies a computationally efficient attitude filter with global uncertainty representation and almost-global stability guarantees, a combination not achieved by existing directional-statistics filters. The closed-form iteration and explicit stability analysis for large initial errors constitute clear strengths.
major comments (2)
- [§5] §5 (stability analysis): The almost-global asymptotic stability claim for the right-invariant-error filter rests on the linearized error system preserving the two essential MFD properties (mean/concentration updates and global uncertainty representation) revealed from exact Bayes evolution. Because linearization is performed locally around the current estimate, it is not evident that these properties remain unperturbed for large initial errors or arbitrary trajectories; this assumption is load-bearing for the global result and requires explicit justification or a supporting lemma.
- [§4] §4 (filter derivation): The closed-form iteration is obtained by substituting the linearized right-invariant error dynamics into the MFD update; however, the manuscript does not quantify the approximation error in the concentration matrix or the mean direction, which could affect whether the two advantageous properties are exactly retained rather than approximately.
minor comments (2)
- [Simulation section] Table 1 or simulation section: the reported computation-time ratios (1/5 to 1/100) would be more convincing if the exact hardware, matrix dimensions, and number of Monte-Carlo runs were stated explicitly.
- [§3] Notation: the symbols for the two essential properties should be introduced once in §3 and used consistently thereafter to avoid ambiguity when referring to their preservation in the linearized filter.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address the major comments point by point below, outlining how we will strengthen the presentation and analysis in the revised version.
read point-by-point responses
-
Referee: [§5] §5 (stability analysis): The almost-global asymptotic stability claim for the right-invariant-error filter rests on the linearized error system preserving the two essential MFD properties (mean/concentration updates and global uncertainty representation) revealed from exact Bayes evolution. Because linearization is performed locally around the current estimate, it is not evident that these properties remain unperturbed for large initial errors or arbitrary trajectories; this assumption is load-bearing for the global result and requires explicit justification or a supporting lemma.
Authors: We agree that the stability argument would benefit from explicit justification of how the linearized error system preserves the essential MFD properties for large initial errors. In the revised manuscript we will insert a supporting lemma in Section 5 that bounds the linearization-induced perturbation on the mean and concentration updates. The lemma will show that, because the right-invariant error is used and the MFD continues to represent global uncertainty on SO(3), the almost-global asymptotic stability established for the exact Bayes evolution carries over to the closed-form filter; the perturbation vanishes asymptotically as the estimate converges, allowing the same Lyapunov argument to apply from almost all initial conditions. revision: yes
-
Referee: [§4] §4 (filter derivation): The closed-form iteration is obtained by substituting the linearized right-invariant error dynamics into the MFD update; however, the manuscript does not quantify the approximation error in the concentration matrix or the mean direction, which could affect whether the two advantageous properties are exactly retained rather than approximately.
Authors: The referee correctly identifies that the approximation error introduced by linearization is not quantified. We will add a short error analysis subsection in Section 4 that derives first-order bounds on the resulting perturbations to the concentration matrix and mean direction. These bounds will be expressed in terms of the linearization residual and the current concentration level; we will then discuss how the right-invariant formulation keeps the two advantageous properties intact to first order, thereby supporting the subsequent stability claims while making the approximate nature of the implementation explicit. revision: yes
Circularity Check
No circularity; derivation builds on independent Bayes-rule analysis and explicit stability proof
full rationale
The paper first derives two essential properties directly from exact MFD evolution under Bayes' rule, then constructs closed-form filters via linearized right-invariant errors that are stated to retain those properties. The almost-global asymptotic stability result for arbitrary SO(3) trajectories is proven using the closed-form iteration and global MFD uncertainty representation. No step reduces by construction to a fitted parameter, self-defined quantity, or load-bearing self-citation; the linearization is an explicit design choice for speed whose preservation of the properties is asserted as part of the filter definition rather than smuggled in. The chain is therefore self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Matrix Fisher distribution can represent global uncertainty on SO(3) and evolves according to Bayes' rule with two essential properties that improve filter performance.
- ad hoc to paper Linearized error systems with right-invariant errors preserve the two advantageous properties of the full MFD Bayesian update.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
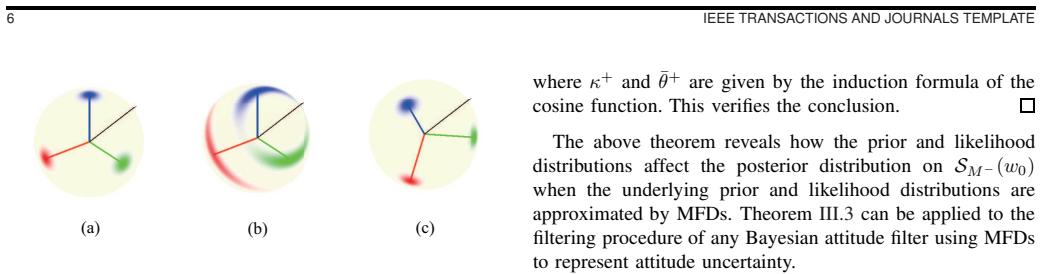
By analyzing the distribution evolution along Bayes’ rule, we reveal two essential properties... κ+ = sqrt((κ−)² + (κm)² + 2κ−κm cos(Δθ̄)), θ̄+ = sign(Δθ̄) arccos((κ− + κm cos(Δθ̄))/κ+)
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The proposed filter with right-invariant error is proven to be almost globally asymptotically stable for any trajectory on SO(3)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Nonlinear compleme ntary filters on the special orthogonal group,
R. Mahony, T. Hamel, and J.-M. Pflimlin, “Nonlinear compleme ntary filters on the special orthogonal group,” IEEE Transactions on automatic control, vol. 53, no. 5, pp. 1203–1218, 2008
work page 2008
-
[2]
Higher order nonlinear compl ementary filtering on lie groups,
D. E. Zlotnik and J. R. Forbes, “Higher order nonlinear compl ementary filtering on lie groups,” IEEE Transactions on Automatic Control , vol. 64, no. 5, pp. 1772–1783, 2018
work page 2018
-
[3]
Globally asymptotically s table attitude observer on so (3),
T.-H. Wu, E. Kaufman, and T. Lee, “Globally asymptotically s table attitude observer on so (3),” in 2015 54th IEEE Conference on Decision and Control (CDC) , pp. 2164–2168, IEEE, 2015
work page 2015
-
[4]
Hybrid global ex ponential stabilization on so (3),
S. Berkane, A. Abdessameud, and A. Tayebi, “Hybrid global ex ponential stabilization on so (3),” Automatica, vol. 81, pp. 279–285, 2017
work page 2017
-
[5]
Hybrid attitude and gyro-bias observer design on so(3),
S. Berkane, A. Abdessameud, and A. Tayebi, “Hybrid attitude and gyro-bias observer design on so(3),” IEEE Transactions on Automatic Control, vol. 62, no. 11, pp. 6044–6050, 2017
work page 2017
-
[6]
Hybrid nonlinear observers for inert ial navi- gation using landmark measurements,
M. Wang and A. Tayebi, “Hybrid nonlinear observers for inert ial navi- gation using landmark measurements,” IEEE Transactions on Automatic Control, vol. 65, no. 12, pp. 5173–5188, 2020
work page 2020
-
[7]
Nonlinear attitude estimation using inter- mittent and multirate vector measurements,
M. Wang and A. Tayebi, “Nonlinear attitude estimation using inter- mittent and multirate vector measurements,” IEEE Transactions on Automatic Control, vol. 69, no. 8, pp. 5231–5245, 2023
work page 2023
-
[8]
Kalman Filtering f or Spacecraft Attitude Estimation,
E. Lefferts, F. Markley, and M. Shuster, “Kalman Filtering f or Spacecraft Attitude Estimation,” Journal of Guidance, Control, and Dynamics , vol. 5, pp. 417–429, Sept. 1982
work page 1982
-
[9]
Attitude error representations for kalman fi ltering,
F. L. Markley, “Attitude error representations for kalman fi ltering,” Journal of guidance, control, and dynamics , vol. 26, no. 2, pp. 311– 317, 2003
work page 2003
-
[10]
Intrinsic Filtering on Lie Group s With Applications to Attitude Estimation,
A. Barrau and S. Bonnabel, “Intrinsic Filtering on Lie Group s With Applications to Attitude Estimation,” IEEE Transactions on Automatic Control, vol. 60, pp. 436–449, Feb. 2015
work page 2015
-
[11]
The Invariant Extended Kalman Fi lter as a Stable Observer,
A. Barrau and S. Bonnabel, “The Invariant Extended Kalman Fi lter as a Stable Observer,” IEEE Transactions on Automatic Control , vol. 62, pp. 1797–1812, Apr. 2017
work page 2017
-
[12]
Stochastic observers on Lie grou ps: A tutorial,
A. Barrau and S. Bonnabel, “Stochastic observers on Lie grou ps: A tutorial,” in 2018 IEEE Conference on Decision and Control (CDC) , pp. 1264–1269, IEEE, 2018
work page 2018
-
[13]
The invariant extended kalman fil ter as a stable observer,
A. Barrau and S. Bonnabel, “The invariant extended kalman fil ter as a stable observer,” IEEE Transactions on Automatic Control , vol. 62, no. 4, pp. 1797–1812, 2016
work page 2016
-
[14]
Extended Kalman Filtering With N onlinear Equality Constraints: A Geometric Approach,
A. Barrau and S. Bonnabel, “Extended Kalman Filtering With N onlinear Equality Constraints: A Geometric Approach,” IEEE Transactions on Automatic Control, vol. 65, pp. 2325–2338, June 2020
work page 2020
-
[15]
The geometry of navigation probl ems,
A. Barrau and S. Bonnabel, “The geometry of navigation probl ems,” IEEE Transactions on Automatic Control , vol. 68, no. 2, pp. 689–704, 2022
work page 2022
-
[16]
Quaternion Invariant Extended Kalman Filtering for Spacecraft Attitude Estimation,
H. Gui and A. H. J. de Ruiter, “Quaternion Invariant Extended Kalman Filtering for Spacecraft Attitude Estimation,” Journal of Guidance, Control, and Dynamics , vol. 41, pp. 863–878, Apr. 2018
work page 2018
-
[17]
An EKF-SLAM algorithm with consistency properties
A. Barrau and S. Bonnabel, “An EKF-SLAM algorithm with consi stency properties,” arXiv preprint arXiv:1510.06263 , 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[18]
InGVIO: A Consistent Invarian t Filter for Fast and High-Accuracy GNSS-Visual-Inertial Odometry ,
C. Liu, C. Jiang, and H. Wang, “InGVIO: A Consistent Invarian t Filter for Fast and High-Accuracy GNSS-Visual-Inertial Odometry ,” IEEE Robotics and Automation Letters , vol. 8, pp. 1850–1857, Mar. 2023
work page 2023
-
[19]
A Right Invariant Extended Kalman Filter for Object Based SLA M,
Y . Song, Z. Zhang, J. Wu, Y . Wang, L. Zhao, and S. Huang, “A Right Invariant Extended Kalman Filter for Object Based SLA M,” IEEE Robotics and Automation Letters , vol. 7, pp. 1316–1323, Apr. 2022
work page 2022
-
[20]
G. S. Chirikjian, Stochastic models, information theory, and Lie groups, volume 2: Analytic methods and modern applications , vol. 2. Springer Science & Business Media, 2011
work page 2011
-
[21]
A. Barrau and S. Bonnabel, “Invariant Kalman Filtering,” Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, pp. 237–257, May 2018
work page 2018
-
[22]
Error propagation on the Eucli dean group with applications to manipulator kinematics,
Y . Wang and G. S. Chirikjian, “Error propagation on the Eucli dean group with applications to manipulator kinematics,” IEEE Transactions on Robotics , vol. 22, no. 4, pp. 591–602, 2006
work page 2006
-
[23]
Nonparametric second-order t heory of error propagation on motion groups,
Y . Wang and G. S. Chirikjian, “Nonparametric second-order t heory of error propagation on motion groups,” The International journal of robotics research, vol. 27, no. 11-12, pp. 1258–1273, 2008
work page 2008
-
[24]
Bayesian fusi on on lie groups,
K. C. Wolfe, M. Mashner, and G. S. Chirikjian, “Bayesian fusi on on lie groups,” Journal of Algebraic Statistics , vol. 2, no. 1, 2011
work page 2011
-
[25]
G. Bourmaud, R. M´ egret, M. Arnaudon, and A. Giremus, “Conti nuous- discrete extended kalman filter on matrix lie groups using co ncentrated gaussian distributions,” Journal of Mathematical Imaging and Vision , vol. 51, pp. 209 – 228, 2014
work page 2014
-
[26]
Matrix Fisher–Gaussian distribution on SO(3) × Rn and Bayesian attitude estimation,
W. Wang and T. Lee, “Matrix Fisher–Gaussian distribution on SO(3) × Rn and Bayesian attitude estimation,” IEEE Transactions on Automatic Control, vol. 67, no. 5, pp. 2175–2191, 2021
work page 2021
-
[27]
K. V . Mardia and P . E. Jupp, eds., Directional Statistics. Wiley Series in Probability and Statistics, Hoboken, NJ, USA: John Wiley & Sons, Inc., Jan. 1999
work page 1999
- [28]
- [29]
-
[30]
T. D. Downs, “Orientation statistics,” Biometrika, vol. 59, no. 3, pp. 665– 676, 1972
work page 1972
-
[31]
The von Mises-Fisher Matrix Di stribu- tion in Orientation Statistics,
C. G. Khatri and K. V . Mardia, “The von Mises-Fisher Matrix Di stribu- tion in Orientation Statistics,” Journal of the Royal Statistical Society: Series B (Methodological) , vol. 39, pp. 95–106, Sept. 1977
work page 1977
-
[32]
An antipodally symmetric distribution on the s phere,
C. Bingham, “An antipodally symmetric distribution on the s phere,” The Annals of Statistics , pp. 1201–1225, 1974
work page 1974
-
[33]
Bayesian attitude estimation with the matrix Fishe r distribution on SO (3),
T. Lee, “Bayesian attitude estimation with the matrix Fishe r distribution on SO (3),” IEEE Transactions on Automatic Control , vol. 63, no. 10, pp. 3377–3392, 2018
work page 2018
-
[34]
Unscented vo n Mises– Fisher Filtering,
G. Kurz, I. Gilitschenski, and U. D. Hanebeck, “Unscented vo n Mises– Fisher Filtering,” IEEE Signal Processing Letters , vol. 23, pp. 463–467, Apr. 2016
work page 2016
-
[35]
Bingham-Gaussian Distribution on S3 × Rn for Unscented Attitude Estimation,
W. Wang and T. Lee, “Bingham-Gaussian Distribution on S3 × Rn for Unscented Attitude Estimation,” in 2021 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Syst ems (MFI) , pp. 1–7, IEEE, 2021
work page 2021
-
[36]
Matrix Fisher-Gaussian distribution on SO(3) × Rn for attitude estimation with a gyro bias,
W. Wang and T. Lee, “Matrix Fisher-Gaussian distribution on SO(3) × Rn for attitude estimation with a gyro bias,” arXiv preprint arXiv:2003.02180, 2020. AUTHOR et al.: TITLE 17
-
[37]
Bayesian Attitude Estimation with Approximate Mat rix Fisher Distributions on SO(3),
T. Lee, “Bayesian Attitude Estimation with Approximate Mat rix Fisher Distributions on SO(3),” in 2018 IEEE Conference on Decision and Control (CDC), (Miami Beach, FL), pp. 5319–5325, IEEE, Dec. 2018
work page 2018
-
[38]
Attitude determination using vector observ ations and the singular value decomposition,
F. L. Markley, “Attitude determination using vector observ ations and the singular value decomposition,” Journal of the Astronautical Sciences , vol. 36, no. 3, pp. 245–258, 1988
work page 1988
-
[39]
G. S. Chirikjian, Engineering Applications of Noncommutative Har- monic Analysis: With Emphasis on Rotation and Motion Groups . CRC press, 2000
work page 2000
-
[40]
R. A. Fisher, “Dispersion on a sphere,” Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences , vol. 217, no. 1130, pp. 295–305, 1953
work page 1953
-
[41]
T. Lee, “Matrix Fisher distribution.” Available: https://github.com/fdcl-gwu/Matrix-Fisher-Distribut ion,
-
[42]
Gaussian statistics for pala eomagnetic vectors,
J. J. Love and C. G. Constable, “Gaussian statistics for pala eomagnetic vectors,” Geophysical Journal International, vol. 152, pp. 515–565, Mar. 2003
work page 2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.