TDoA-Based Self-Supervised Channel Charting with NLoS Mitigation
Pith reviewed 2026-05-18 08:52 UTC · model grok-4.3
The pith
TDoA-based self-supervised channel charting with NLoS mitigation and UE displacement achieves 2-4 meter accuracy in 90% of cases in a real 5G testbed, outperforming prior semi- and self-supervised methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed framework is further enhanced with short-interval User Equipment (UE) displacement measurements, which improve the continuity and robustness of the learned positioning function. Our algorithm incorporates a mechanism to identify and mask NLoS-induced noisy measurements, leading to significant performance gains. ... localization accuracies of 2--4 meters in 90% of cases, across varying NLoS ratios.
Load-bearing premise
That short-interval UE displacement measurements and the NLoS masking mechanism can be reliably extracted or estimated from the available CIR and TDoA data without introducing new errors that undermine the self-supervised training.
Figures

















read the original abstract
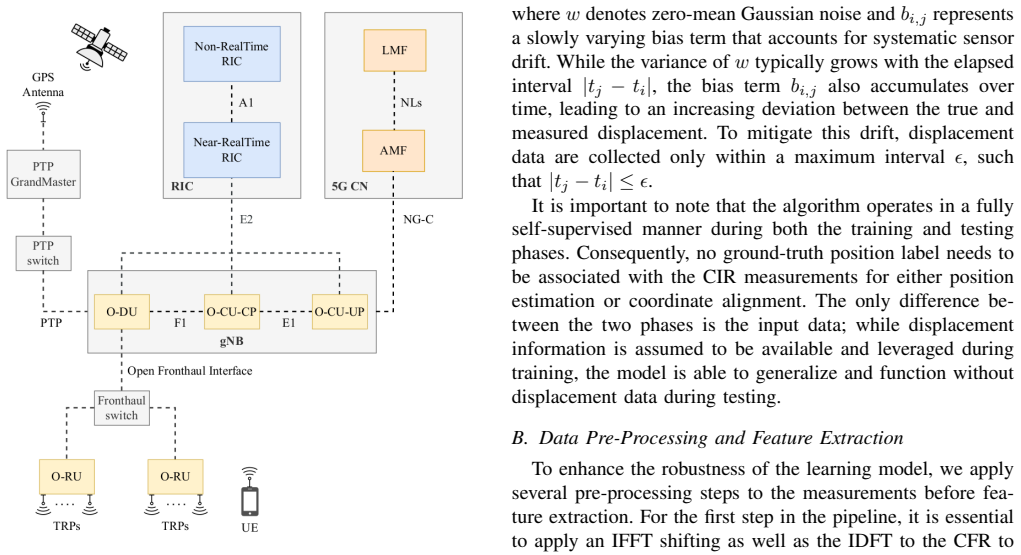
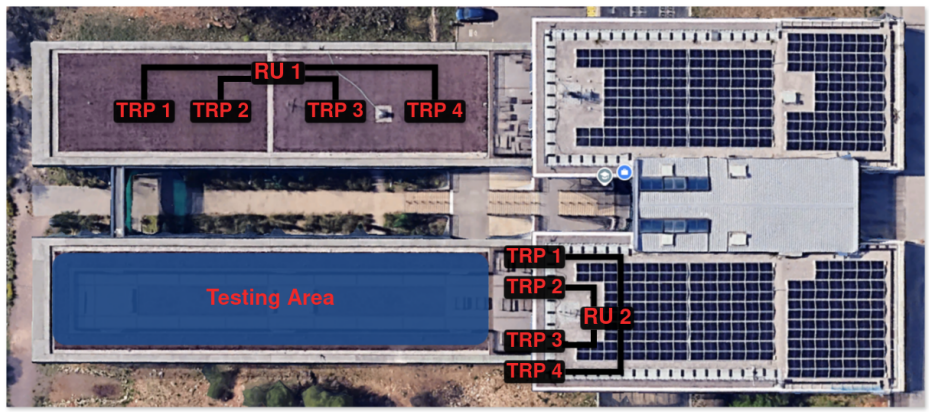
Channel Charting (CC) has emerged as a promising framework for data-driven radio localization, yet existing approaches often struggle to scale globally and to handle the distortions introduced by non-line-of-sight (NLoS) conditions. In this work, we propose a novel CC method that leverages Channel Impulse Response (CIR) data enriched with practical features such as Time Difference of Arrival (TDoA) and Transmission Reception Point (TRP) locations, enabling a TDoA-based self-supervised localization function on a global scale. The proposed framework is further enhanced with short-interval User Equipment (UE) displacement measurements, which improve the continuity and robustness of the learned positioning function. Our algorithm incorporates a mechanism to identify and mask NLoS-induced noisy measurements, leading to significant performance gains. We present the evaluation of our proposed models in a real 5G testbed, benchmarked against centimeter-accurate Real-Time Kinematic (RTK) positioning, in an O-RAN-based 5G network using OpenAirInterface (OAI) software at EURECOM. It demonstrates results that outperform state-of-the-art semi-supervised and self-supervised CC approaches in a real-world scenario. The results show localization accuracies of 2--4 meters in 90\% of cases, across varying NLoS ratios. Furthermore, we provide public datasets of CIR recordings, along with the true position labels used in this paper's evaluation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a TDoA-based self-supervised Channel Charting framework that augments CIR data with TDoA and TRP locations to learn a global positioning function. It incorporates short-interval UE displacement measurements for continuity and a mechanism to detect and mask NLoS-induced noisy TDoA values. The approach is evaluated in a real 5G O-RAN testbed using OpenAirInterface at EURECOM, benchmarked against RTK ground truth, and reports 2–4 m accuracy in 90 % of cases across varying NLoS ratios while outperforming prior semi- and self-supervised CC methods. Public CIR datasets with position labels are released.
Significance. If the reported accuracy is robustly supported, the work would advance practical self-supervised radio localization in 5G by addressing NLoS without large labeled datasets. The real-world O-RAN testbed evaluation and public dataset release are clear strengths that aid reproducibility.
major comments (2)
- [§4] §4 (NLoS masking): the manuscript introduces a mechanism to identify and mask NLoS-induced noisy measurements and claims significant performance gains, yet provides no ablation that isolates the masking step’s contribution to the self-supervised loss or final accuracy; without this, it is unclear whether the 2–4 m result stems from the masking heuristic or from other factors.
- [Method (displacement)] Method section on continuity regularization: short-interval UE displacement measurements are stated to improve continuity and robustness of the learned positioning function, but no ablation or error-propagation analysis quantifies their effect when these displacements are derived solely from CIR/TDoA inputs without external ground truth.
minor comments (2)
- [Evaluation] Table or figure presenting the 90 % accuracy figures should include per-NLoS-ratio breakdowns and direct numerical comparison to the cited SOTA baselines.
- Notation for the self-supervised loss terms (continuity, masking, etc.) should be introduced once with a single equation reference rather than scattered descriptions.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of the manuscript's significance, particularly regarding the real-world O-RAN testbed evaluation and public dataset release. We address each major comment point by point below, with revisions incorporated where they strengthen the work without misrepresenting the original contributions.
read point-by-point responses
-
Referee: [§4] §4 (NLoS masking): the manuscript introduces a mechanism to identify and mask NLoS-induced noisy measurements and claims significant performance gains, yet provides no ablation that isolates the masking step’s contribution to the self-supervised loss or final accuracy; without this, it is unclear whether the 2–4 m result stems from the masking heuristic or from other factors.
Authors: We agree that an explicit ablation isolating the NLoS masking mechanism's contribution would improve clarity. In the revised manuscript, we have added an ablation study in Section 5 that compares the full model (with masking) against a variant trained without the masking step in the self-supervised loss. The results show that masking reduces the impact of noisy TDoA values and contributes to the reported 2–4 m accuracy, particularly at higher NLoS ratios, while the other components (TDoA augmentation and displacement regularization) provide baseline performance. revision: yes
-
Referee: [Method (displacement)] Method section on continuity regularization: short-interval UE displacement measurements are stated to improve continuity and robustness of the learned positioning function, but no ablation or error-propagation analysis quantifies their effect when these displacements are derived solely from CIR/TDoA inputs without external ground truth.
Authors: The short-interval UE displacements are estimated directly from the CIR/TDoA inputs in a self-supervised manner, without relying on external ground truth during training or inference. We acknowledge that a dedicated ablation or error-propagation analysis would better quantify their isolated effect. We have therefore added a sensitivity analysis in the revised evaluation section, where we inject controlled noise levels into the displacement estimates (mimicking derivation from noisy CIR/TDoA) and report the resulting degradation in positioning continuity and accuracy. This demonstrates the robustness of the continuity regularization term. revision: yes
Circularity Check
No significant circularity; self-supervised derivation remains independent of its inputs
full rationale
The manuscript describes a data-driven TDoA-based self-supervised channel charting framework that learns a positioning function from CIR and TDoA features, augmented by displacement measurements and an NLoS masking step. No equations or loss terms are shown to reduce by construction to the target outputs (e.g., no fitted parameter renamed as a prediction, no self-definitional loop where the continuity term is defined from the very chart it regularizes). Evaluation relies on independent RTK ground truth for benchmarking rather than internal consistency alone, and the central claims are presented as learned from external radio measurements without load-bearing self-citations or uniqueness theorems imported from prior author work. The method is therefore self-contained against the provided benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
TDoA loss ℓ_Δτ and displacement loss ℓ_d integrated in L (Eq. 16); NLoS mask ν via peak-power threshold λ on normalized CIR (Eq. 17-18)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Self-supervised mapping f_θ : CIR → 2-D embedding preserving geometric relations via TDoA and short-interval displacements
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
3GPP, “NG Radio Access Network (NG-RAN); Stage 2 functional spec- ification of User Equipment (UE) positioning in NG-RAN,” Technical Specification 3GPP TS 38.305, 2022
work page 2022
-
[2]
5GNR Indoor Positioning By Joint DL-TDoA and DL-AoD,
M. Ahadi and F. Kaltenberger, “5GNR Indoor Positioning By Joint DL-TDoA and DL-AoD,” in2023 IEEE Wireless Communications and Networking Conference (WCNC), 2023
work page 2023
-
[3]
A Survey of Machine Learning for Indoor Positioning,
A. Nessa, B. Adhikari, F. Hussain, and X. N. Fernando, “A Survey of Machine Learning for Indoor Positioning,”IEEE Access, vol. 8, 2020
work page 2020
-
[4]
Wireless channel charting: Theory, practice, and applications,
P. Ferrand, M. Guillaud, C. Studer, and O. Tirkkonen, “Wireless channel charting: Theory, practice, and applications,”IEEE Communications Magazine, vol. 61, no. 6, pp. 124–130, 2023
work page 2023
-
[5]
Dimensionality reduction: A comparative review,
L. Van Der Maaten, E. O. Postma, H. J. van den Heriket al., “Dimensionality reduction: A comparative review,”Journal of Machine Learning Research, vol. 10, no. 66-71, p. 13, 2009
work page 2009
-
[6]
Channel Charting: Locating Users Within the Radio Environment Using Channel State Information,
C. Studer, S. Medjkouh, E. Gonultas ¸, T. Goldstein, and O. Tirkkonen, “Channel Charting: Locating Users Within the Radio Environment Using Channel State Information,”IEEE Access, vol. 6
-
[7]
Multi- point Channel Charting for Wireless Networks,
J. Deng, S. Medjkouh, N. Malm, O. Tirkkonen, and C. Studer, “Multi- point Channel Charting for Wireless Networks,” in2018 52nd Asilomar Conference on Signals, Systems, and Computers
-
[8]
Multipoint Channel Charting With Multiple-Input Multiple-Output Convolutional Autoencoder,
C. Geng, H. Huang, and J. Langerman, “Multipoint Channel Charting With Multiple-Input Multiple-Output Convolutional Autoencoder,” in 2020 IEEE/ION Position, Location and Navigation Symposium
work page 2020
-
[9]
Improving Channel Charting with Representation-Constrained Autoencoders,
P. Huang, O. Casta ˜neda, E. G ¨on¨ultas ¸, S. Medjkouh, O. Tirkko- nen, T. Goldstein, and C. Studer, “Improving Channel Charting with Representation-Constrained Autoencoders,”2019 IEEE 20th Interna- tional Workshop on Signal Processing Advances in Wireless Commu- nications (SPAWC)
work page 2019
-
[10]
Not-Too-Deep Channel Charting (N2D-CC),
P. Agostini, Z. Utkovski, S. Sta ´nczak, A. A. Memon, B. Zafar, and M. Haardt, “Not-Too-Deep Channel Charting (N2D-CC),” inIEEE Wireless Communications and Networking Conference (WCNC), 2022
work page 2022
-
[11]
Siamese Neural Networks for Wireless Positioning and Channel Chart- ing,
E. Lei, O. Casta ˜neda, O. Tirkkonen, T. Goldstein, and C. Studer, “Siamese Neural Networks for Wireless Positioning and Channel Chart- ing,” in2019 57th Annual Allerton Conference on Communication, Control, and Computing (Allerton)
-
[12]
Triplet-Based Wireless Channel Charting: Architecture and Experiments,
Ferrand, Paul and Decurninge, Alexis and Ordo ˜nez, Luis G. and Guil- laud, Maxime, “Triplet-Based Wireless Channel Charting: Architecture and Experiments,”IEEE Journal on Selected Areas in Communications, vol. 39, no. 8, 2021
work page 2021
-
[13]
Improving Triplet-Based Channel Charting on Distributed Massive MIMO Measurements,
Euchner, Florian and Stephan, Phillip and Gauger, Marc and D ¨orner, Sebastian and Ten Brink, Stephan, “Improving Triplet-Based Channel Charting on Distributed Massive MIMO Measurements,” inIEEE 23rd International Workshop on Signal Processing Advances in Wireless Communication (SPAWC), 2022
work page 2022
-
[14]
Indoor Localization With Robust Global Channel Charting: A Time-Distance-Based Ap- proach,
Stahlke, Maximilian and Yammine, George and Feigl, Tobias and Eskofier, Bjoern M. and Mutschler, Christopher, “Indoor Localization With Robust Global Channel Charting: A Time-Distance-Based Ap- proach,”IEEE Transactions on Machine Learning in Communications and Networking, vol. 1, pp. 3–17, 2023
work page 2023
-
[15]
Estimation of Cellular Wireless User Coordinates via Channel Charting and MUSIC,
Aly, Amr and Ayanoglu, Ender, “Estimation of Cellular Wireless User Coordinates via Channel Charting and MUSIC,” in2023 International Conference on Computing, Networking and Communications (ICNC)
-
[16]
Aug- menting Channel Charting with Classical Wireless Source Localization Techniques,
Euchner, Florian and Stephan, Phillip and Brink, Stephan ten, “Aug- menting Channel Charting with Classical Wireless Source Localization Techniques,” in2023 57th Asilomar Conference on Signals, Systems, and Computers, 2023
work page 2023
-
[17]
Velocity-Based Channel Charting with Spatial Distribution Map Match- ing,
M. Stahlke, G. Yammine, T. Feigl, B. M. Eskofier, and C. Mutschler, “Velocity-Based Channel Charting with Spatial Distribution Map Match- ing,” 2023
work page 2023
-
[18]
Channel Charting in Real-World Coordinates,
S. Taner, V . Palhares, and C. Studer, “Channel Charting in Real-World Coordinates,” in2023 IEEE Global Communications Conference
-
[19]
Global Scale Self-Supervised Channel Charting with Sensor Fusion,
Esrafilian, Omid and Ahadi, Mohsen and Kaltenberger, Florian and Gesbert, David, “Global Scale Self-Supervised Channel Charting with Sensor Fusion,” in2024 IEEE Globecom Workshops (GC Wkshps), 2024, pp. 1–6
work page 2024
-
[20]
GPS/BDS RTK Positioning based on Equivalence Principle Using Multiple Reference Stations,
J. Wang, T. Xu, W. Nie, and G. Xu, “GPS/BDS RTK Positioning based on Equivalence Principle Using Multiple Reference Stations,” Remote Sensing, vol. 12, no. 19, p. 3178, 2020. [Online]. Available: https://www.mdpi.com/2072-4292/12/19/3178
work page 2020
-
[21]
“O-ran architecture overview,” O-RAN Software Community documen- tation, 2025, cherry release, retrieved from O-RAN SC website
work page 2025
-
[22]
Experimental Insights from OpenAirInterface 5G positioning Testbeds: Challenges and solutions,
M. Ahadi, A. Malik, O. Esrafilian, F. Kaltenberger, and C. Thienot, “Experimental Insights from OpenAirInterface 5G positioning Testbeds: Challenges and solutions,” 2025. [Online]. Available: https://arxiv.org/ abs/2508.19736
-
[23]
J. Kennedy and R. Eberhart, “Particle swarm optimization,” inProceed- ings of ICNN’95 - International Conference on Neural Networks, vol. 4. IEEE, 1995, pp. 1942–1948
work page 1995
-
[24]
A. Malik, M. Ahadi, F. Kaltenberger, K. Warnke, N. T. Thinh, N. Bouk- nana, C. Thienot, G. Onche, and S. Arora, “From concept to reality: 5G positioning with open-source implementation of UL-TDoA in OpenAir- Interface,”arXiv preprint arXiv:2409.05217, 2024
-
[25]
VVDN Technologies, “5G NR Enterprise Radio Units,” https://www. vvdntech.com
- [26]
-
[27]
Directional Antennas Product Information,
Panorama Antennas, “Directional Antennas Product Information,” https: //www.panorama-antennas.com/, accessed: 2025-09-17
work page 2025
-
[28]
O-RAN Fronthaul Control, User and Synchronization Plane Specifi- cation,
“O-RAN Fronthaul Control, User and Synchronization Plane Specifi- cation,” O-RAN ALLIANCE, Tech. Rep. O-RAN.WG4.CUS.0-v10.00, Jul. 2023, available: https://www.o-ran.org/specifications
work page 2023
-
[29]
Channel Charting with Angle-Delay-Power-Profile Features and Earth-Mover Distance,
AL–Tous, Hanan and Kazemi, Parham and Studer, Christoph and Tirkkonen, Olav, “Channel Charting with Angle-Delay-Power-Profile Features and Earth-Mover Distance,” in2022 56th Asilomar Conference on Signals, Systems, and Computers, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.