A Constant-Gain Equation-Error Framework for Airliner Aerodynamic Monitoring Using QAR Data
Pith reviewed 2026-05-18 00:57 UTC · model grok-4.3
The pith
A constant-gain equation-error method extracts reliable aerodynamic parameters from airliner QAR data in cruise.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that the Constant-Gain Equation-Error Method overcomes the unsuitability of state-propagation filters (due to absent inertia parameters) and the failure of variable-gain recursive estimators on cruise data by using a constant gain, thereby delivering accurate aerodynamic monitoring from operational QAR records.
What carries the argument
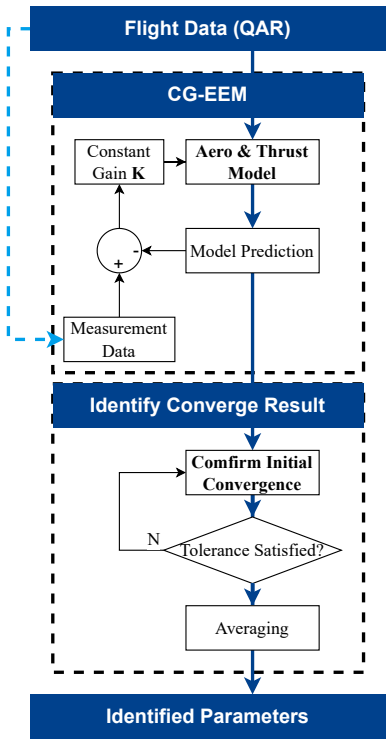
The Constant-Gain Equation-Error Method (CG-EEM), which decouples the estimation from state propagation and employs a fixed gain tuned for stationary low-signal-to-noise cruise conditions.
If this is right
- The method supports fleet-wide monitoring without special test flights or extra sensors.
- It identifies performance degradation early through shifts in the estimated parameters.
- Computed coefficients remain consistent across repeated flights of the same aircraft.
- The approach runs efficiently enough for routine processing of large data volumes.
- It distinguishes aerodynamic behavior between different airliner types as expected.
Where Pith is reading between the lines
- Similar fixed-gain strategies might improve other parameter estimation tasks that encounter long stretches of low-excitation data.
- Airlines could incorporate the outputs into existing maintenance scheduling systems.
- Extending the framework to takeoff or landing phases would require handling non-stationary conditions explicitly.
- The results suggest that constant-gain designs could reduce computational load in real-time onboard applications.
Load-bearing premise
Cruise flight segments provide stationary statistics with sufficiently low noise that a single fixed gain remains appropriate throughout the estimation window.
What would settle it
A dataset of repeated flights on identical aircraft where the estimated lift or drag coefficients vary significantly beyond measurement uncertainty or known degradation rates would falsify the claim of robustness.
Figures
read the original abstract
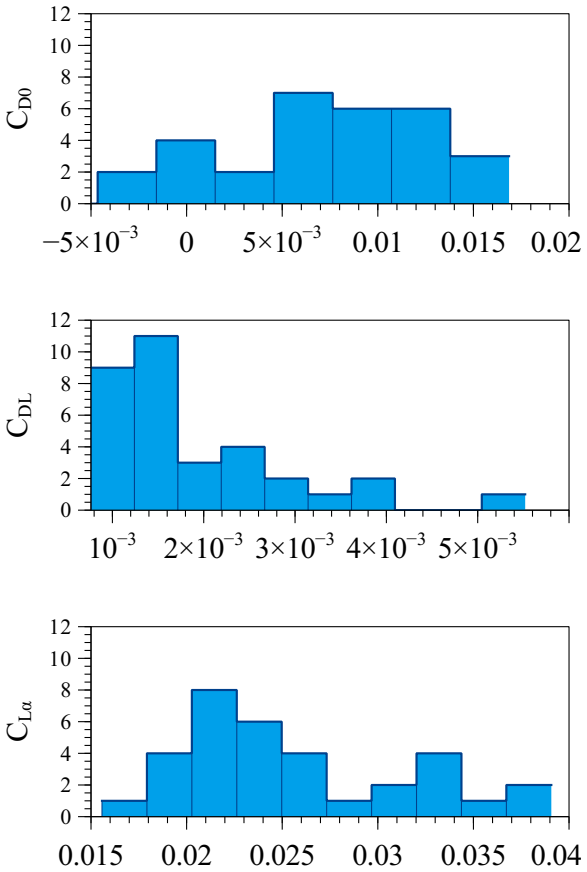
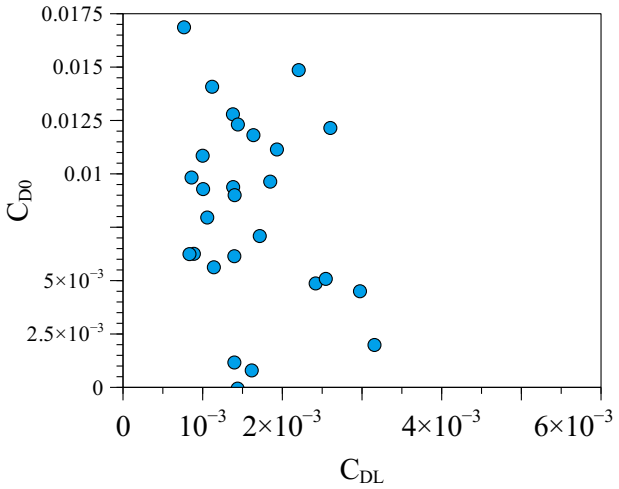
Monitoring the in-service aerodynamic performance of airliners is critical for operational efficiency and safety, but using operational Quick Access Recorder (QAR) data for this purpose presents significant challenges. This paper first establishes that the absence of key parameters, particularly aircraft moments of inertia, makes conventional state-propagation filters fundamentally unsuitable for this application. This limitation necessitates a decoupled, Equation-Error Method (EEM). However, we then demonstrate through a comparative analysis that standard recursive estimators with time-varying gains, such as Recursive Least Squares (RLS), also fail within an EEM framework, exhibiting premature convergence or instability when applied to low-excitation cruise data. To overcome these dual challenges, we propose and validate the Constant-Gain Equation-Error Method (CG-EEM). This framework employs a custom estimator with a constant, Kalman-like gain, which is perfectly suited to the stationary, low-signal-to-noise characteristics of cruise flight. The CG-EEM is extensively validated on a large, multi-fleet dataset of over 200 flights, where it produces highly consistent, physically plausible aerodynamic parameters and correctly identifies known performance differences between aircraft types. The result is a robust, scalable, and computationally efficient tool for fleet-wide performance monitoring and the early detection of performance degradation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Constant-Gain Equation-Error Method (CG-EEM) for estimating aerodynamic parameters from operational QAR data during cruise. It first argues that state-propagation filters are unsuitable because moments of inertia are unavailable in QAR records, then shows that standard recursive estimators such as RLS exhibit instability or premature convergence on low-excitation cruise segments. The authors introduce a custom constant-gain estimator claimed to be matched to the stationary, low-SNR character of cruise flight and report validation on a multi-fleet dataset of more than 200 flights that yields consistent, physically plausible parameter values capable of distinguishing known type-to-type performance differences.
Significance. If the quantitative evidence were supplied, the work would offer a practical, computationally lightweight route to fleet-wide aerodynamic monitoring that exploits existing QAR streams without requiring full-state instrumentation or high-excitation maneuvers. The scale of the dataset (multi-fleet, >200 flights) is a clear strength and would support claims of robustness and scalability for operational use.
major comments (3)
- [Abstract / Validation] Abstract and validation results: the central claim that CG-EEM produces 'highly consistent, physically plausible aerodynamic parameters' and 'correctly identifies known performance differences' is unsupported by any reported quantitative metrics (standard deviations across flights, confidence intervals, RMS errors, or per-parameter statistics). Without these, it is impossible to distinguish genuine aerodynamic consistency from damping artifacts introduced by the constant-gain filter.
- [Method] Method and estimator design: the constant gain is described as 'custom' and 'perfectly suited' to stationary cruise conditions, yet no derivation, tuning procedure, or independence from the validation data set is provided. This leaves open the possibility that the gain choice is tuned to the same low-excitation data used for the consistency claims, undermining the assertion of robustness.
- [Validation] Validation design: no baseline comparisons (e.g., to batch least-squares, other constant-gain variants, or independent flight-test references) and no exclusion criteria or handling of unmodeled effects (wind, sensor bias) are reported. Consequently the claim that CG-EEM enables early detection of performance degradation rests on qualitative plausibility rather than falsifiable accuracy evidence.
minor comments (2)
- [Method] Notation for the constant-gain update equation should be introduced explicitly with a numbered equation so that readers can verify the claimed Kalman-like structure.
- [Results] The manuscript would benefit from a short table summarizing the estimated aerodynamic coefficients (means and spreads) for each aircraft type to make the 'physically plausible' claim concrete.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and indicate the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract / Validation] Abstract and validation results: the central claim that CG-EEM produces 'highly consistent, physically plausible aerodynamic parameters' and 'correctly identifies known performance differences' is unsupported by any reported quantitative metrics (standard deviations across flights, confidence intervals, RMS errors, or per-parameter statistics). Without these, it is impossible to distinguish genuine aerodynamic consistency from damping artifacts introduced by the constant-gain filter.
Authors: We agree that quantitative metrics are needed to support the consistency claims and to rule out filter-induced artifacts. In the revised manuscript we will add per-parameter standard deviations across the >200 flights, 95% confidence intervals, and RMS error statistics relative to the mean estimates. These additions will be placed in the validation section alongside the existing multi-fleet results. revision: yes
-
Referee: [Method] Method and estimator design: the constant gain is described as 'custom' and 'perfectly suited' to stationary cruise conditions, yet no derivation, tuning procedure, or independence from the validation data set is provided. This leaves open the possibility that the gain choice is tuned to the same low-excitation data used for the consistency claims, undermining the assertion of robustness.
Authors: The constant gain is obtained from the steady-state Kalman filter Riccati solution under the stationary noise model appropriate to cruise flight; the tuning parameters are the process and measurement noise covariances, which are set from physical sensor specifications and typical cruise turbulence levels rather than from the validation flights themselves. To remove any ambiguity we will insert an explicit derivation subsection and a statement confirming that the gain values were fixed prior to processing the validation dataset. revision: yes
-
Referee: [Validation] Validation design: no baseline comparisons (e.g., to batch least-squares, other constant-gain variants, or independent flight-test references) and no exclusion criteria or handling of unmodeled effects (wind, sensor bias) are reported. Consequently the claim that CG-EEM enables early detection of performance degradation rests on qualitative plausibility rather than falsifiable accuracy evidence.
Authors: The manuscript already contains a direct comparison showing that time-varying-gain RLS diverges or converges prematurely on the same cruise segments; we will augment this with batch least-squares results on selected high-excitation segments and a brief discussion of alternative constant-gain formulations. We will also add a dedicated paragraph on flight exclusion criteria (e.g., sustained wind shear or sensor fault flags) and a sensitivity study quantifying the effect of typical wind and bias levels on the estimated coefficients. These changes will supply the requested falsifiable evidence while preserving the paper’s focus on operational QAR data. revision: partial
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper's chain first identifies the unsuitability of state-propagation filters due to missing moments of inertia (a physical limitation independent of the proposed method), then shows via comparative analysis that time-varying-gain estimators like RLS exhibit instability on low-excitation cruise data, and finally introduces CG-EEM with a constant Kalman-like gain chosen for its match to stationary low-SNR conditions. This choice is presented as custom engineering rather than a fit to the validation dataset, and the subsequent validation on a separate multi-fleet collection of over 200 flights supplies an external consistency check. No quoted equations or steps reduce a claimed result to its own inputs by construction, no self-citations are load-bearing, and no parameters are fitted on a subset then renamed as predictions; the framework therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- constant gain
axioms (2)
- domain assumption Absence of moments of inertia makes conventional state-propagation filters fundamentally unsuitable
- domain assumption Standard recursive estimators with time-varying gains fail on low-excitation cruise data
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
This framework employs a custom estimator with a constant, Kalman-like gain, which is perfectly suited to the stationary, low-signal-to-noise characteristics of cruise flight.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
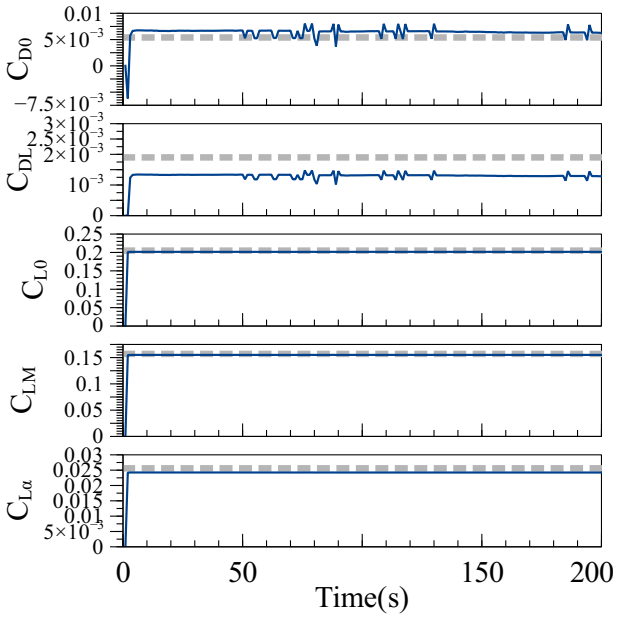
The CG-EEM is extensively validated on a large, multi-fleet dataset of over 200 flights, where it produces highly consistent, physically plausible aerodynamic parameters.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
N. J. Kurus and T. T. Takahashi, “Does your aircraft’s metabolism slow with time? an analysis of flight performance degradation associated with aging aircraft,” inAIAA Scitech 2021 Forum, p. 0460, 2021
work page 2021
-
[2]
Application of parameter estimation to aircraft stability and control: The output-error approach,
R. E. Maine and K. W. Iliff, “Application of parameter estimation to aircraft stability and control: The output-error approach,” tech. rep., 1986
work page 1986
-
[3]
R. V . Jategaonkar,Flight vehicle system identification: a time domain methodology. Amer- ican Institute of Aeronautics and Astronautics, 2006
work page 2006
-
[4]
Cfd vision 2030 study: a path to revolutionary computational aerosciences,
J. P. Slotnick, A. Khodadoust, J. Alonso, D. Darmofal, W. Gropp, E. Lurie, and D. J. Mavriplis, “Cfd vision 2030 study: a path to revolutionary computational aerosciences,” tech. rep., 2014
work page 2030
-
[5]
Accuracy of cfd simulations in urban aerodynamics and microclimate: Progress and challenges,
Y . Tominaga, L. L. Wang, Z. J. Zhai, and T. Stathopoulos, “Accuracy of cfd simulations in urban aerodynamics and microclimate: Progress and challenges,”Building and Environ- ment, vol. 243, p. 110723, 2023
work page 2023
-
[6]
Techniques for improving neural network-based aerodynamics reduced-order models,
Q. Wang, R. R. Medeiros, C. E. Cesnik, K. Fidkowski, J. Brezillon, and H. M. Bleecke, “Techniques for improving neural network-based aerodynamics reduced-order models,” in AIAA SciTech 2019 Forum, p. 1849, 2019
work page 2019
-
[7]
Nonlinear aerodynamic reduced order modeling by dis- crete time recurrent neural networks,
A. Mannarino and P. Mantegazza, “Nonlinear aerodynamic reduced order modeling by dis- crete time recurrent neural networks,”Aerospace Science and Technology, vol. 47, pp. 406– 419, 2015
work page 2015
-
[8]
H. Zhe, K. Yinan, Y . Weigang, and C. Gang, “Aircraft parameter estimation using a stacked long short-term memory network and levenberg-marquardt method,”Chinese Journal of Aeronautics, vol. 37, no. 2, pp. 123–136, 2024
work page 2024
-
[9]
A novel data-driven approach to parameter identification for flight simulation,
H. Geng and Y . Li, “A novel data-driven approach to parameter identification for flight simulation,” in2023 42nd Chinese Control Conference (CCC), pp. 6668–6673, IEEE, 2023
work page 2023
-
[10]
Explainable artificial intelligence: an analytical review,
P. P. Angelov, E. A. Soares, R. Jiang, N. I. Arnold, and P. M. Atkinson, “Explainable artificial intelligence: an analytical review,”Wiley Interdisciplinary Reviews: Data Mining and Knowledge Discovery, vol. 11, no. 5, p. e1424, 2021
work page 2021
-
[11]
Aerodynamic parameter estimation from flight data applying extended and unscented kalman filter,
G. Chowdhary and R. Jategaonkar, “Aerodynamic parameter estimation from flight data applying extended and unscented kalman filter,”Aerospace science and technology, vol. 14, no. 2, pp. 106–117, 2010
work page 2010
-
[12]
A bayesian adaptive unscented kalman filter for aircraft parameter and noise estimation,
D. Ding, K. F. He, and W. Q. Qian, “A bayesian adaptive unscented kalman filter for aircraft parameter and noise estimation,”Journal of Sensors, vol. 2021, no. 1, p. 9002643, 2021. 18
work page 2021
-
[13]
W. Qing, W. Kaiyuan, K. Yi’nan, Q. Weiqi,et al., “Aerodynamic modeling and parame- ter estimation from qar data of an airplane approaching a high-altitude airport,”Chinese Journal of Aeronautics, vol. 25, no. 3, pp. 361–371, 2012
work page 2012
-
[14]
Tuning of the kalman filter using constant gains,
M. R. Ananthasayanam, “Tuning of the kalman filter using constant gains,” inIntroduction and Implementations of the Kalman Filter(F. Govaers, ed.), ch. 3, Rijeka: IntechOpen, 2018
work page 2018
-
[15]
Characteristics of the specific fuel consumption for jet engines,
B. Artur, “Characteristics of the specific fuel consumption for jet engines,” tech. rep., Ham- burg University of Applied Sciences, 2018
work page 2018
-
[16]
A linear parameter varying model of the boeing 747-100/200 longitudinal motion,
A. M. Esteban, “A linear parameter varying model of the boeing 747-100/200 longitudinal motion,” Master’s thesis, University of Minnesota, 2001
work page 2001
-
[17]
The simulation of a jumbo jet transport aircraft. volume 2: Modeling data,
C. R. Hanke and D. R. Nordwall, “The simulation of a jumbo jet transport aircraft. volume 2: Modeling data,” tech. rep., NASA, 1970. 19
work page 1970
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.