On a Class of Dynamical Poisson-Voronoi Tessellations
Pith reviewed 2026-05-21 17:51 UTC · model grok-4.3
The pith
Dynamical Poisson-Voronoi tessellations from moving stations yield a stationary handover point process whose intensity and inter-event times are explicitly determined.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In this dynamical Poisson-Voronoi model, the handover point process observed by a typical fixed user is stationary. Its intensity is derived explicitly, as is the joint distribution of successive inter-handover intervals. The process admits a three-dimensional state description consisting of the distance to the serving station, the distance to the next nearest, and the relative velocities, which renders the association dynamics Markovian. These properties hold in both the single-speed and multi-speed cases.
What carries the argument
The handover point process, defined as the epochs when a typical user switches to a new nearest mobile station, together with the three-dimensional state variables that Markovize the association dynamics.
Load-bearing premise
The stations begin at positions drawn from a homogeneous Poisson point process and each moves forever at its own fixed speed in a uniformly random direction.
What would settle it
Simulate many trajectories of Poisson-initialized stations moving at constant speeds; count the number of handovers per unit time for a fixed user and check whether it converges to the paper's predicted intensity value.
Figures














































read the original abstract
Consider a dynamical network model featuring mobile stations on the Euclidean plane. The initial locations of the stations are given by a homogeneous Poisson point process. The stations are all moving at a constant speed and in a random direction. Consider fixed users located in the Euclidean plane, which are served by the mobile stations. Each user stays connected to the nearest station at any given point of time. Since the stations are moving, a user disconnects and connects with different stations over time, by always selecting which ever station is the closest. This gives rise to a dynamical version of the Poisson-Voronoi tessellation. The focus of this paper is on the sequence of ``handover'' events of a typical user, which are the epochs when its association changes. This defines a point process on the time-axis, the ``handover point process''. We show that this point process is stationary and we determine its main properties, in particular its intensity and the joint distribution of its inter-event times. We also analyze the handover Palm distributions of several variables of practical interest. This includes the distance to the closest mobile stations and the point process of all other mobile stations at handover epochs. The analysis is conducted both in the single-speed and in the multi-speed scenarios. It leads to the identification of the three dimensional state variables that ``Markovize'' the association dynamics. The analysis is based on a specific system of non compact particles. The motivations are in the modeling of low or medium orbit satellite wireless communication networks. The model studied here is a planar ``caricature'' of this problem, which is initially defined on the sphere.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies a dynamical Poisson-Voronoi tessellation generated by mobile stations whose initial positions form a homogeneous Poisson point process on the Euclidean plane, each moving at constant speed in a random direction. For a typical fixed user, the sequence of handover events (times when the serving station changes) defines a point process on the time axis. The authors establish that this handover point process is stationary, compute its intensity and the joint distribution of inter-event times, and examine the Palm distributions at handover epochs for quantities such as distance to the nearest station and the configuration of other stations. The analysis covers both single-speed and multi-speed regimes and identifies a three-dimensional Markov state (distance to nearest station, relative velocity components, and angular variable) that governs the association dynamics.
Significance. If the results hold, the paper supplies a rigorous stochastic-geometry treatment of handover processes in a mobile Poisson-Voronoi setting that serves as a planar caricature for low- or medium-orbit satellite networks. The explicit intensity formula, joint inter-event distribution, and Markovian reduction to a three-dimensional state provide concrete, computable tools for performance analysis. The construction rests directly on the time-homogeneous Poisson point process and i.i.d. constant-velocity motions, with no evident circularity or hidden compactness assumptions.
major comments (1)
- The reduction to the three-dimensional Markov state is load-bearing for the derivation of the intensity and inter-event distributions; the manuscript should explicitly verify that the generator of this state (distance, relative velocity components, angular variable) is sufficient to determine the future evolution of the association process in both the single-speed and multi-speed cases.
minor comments (2)
- Notation for the multi-speed regime should be introduced with a short comparison table or paragraph distinguishing it from the single-speed case to improve readability.
- The term 'non compact particles' appearing in the abstract and introduction would benefit from a one-sentence clarification for readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and the recommendation of minor revision. We address the single major comment below and will incorporate the requested clarification.
read point-by-point responses
-
Referee: The reduction to the three-dimensional Markov state is load-bearing for the derivation of the intensity and inter-event distributions; the manuscript should explicitly verify that the generator of this state (distance to nearest station, relative velocity components, and angular variable) is sufficient to determine the future evolution of the association process in both the single-speed and multi-speed cases.
Authors: We agree that an explicit verification of the Markov property via the infinitesimal generator would strengthen the exposition. Although the manuscript already identifies the three-dimensional state (distance to nearest station, relative velocity components, and angular variable) that Markovizes the association dynamics, we will add a dedicated paragraph deriving the generator and confirming that it fully governs the future evolution of the handover process. This verification will rely on the lack of memory in the underlying Poisson point process and the deterministic constant-velocity motions, and will be provided separately for the single-speed and multi-speed regimes. revision: yes
Circularity Check
No significant circularity; derivation self-contained from PPP and motion primitives
full rationale
The paper establishes stationarity of the handover point process and computes its intensity plus joint inter-event distributions from the given homogeneous Poisson point process of initial station locations together with i.i.d. constant-velocity random directions. The three-dimensional Markov state (nearest-station distance, relative velocity components, angular variable) is obtained directly by reduction of these primitives; the generator then yields the Palm distributions and intensity without any fitted parameters, self-referential definitions, or load-bearing self-citations. Both single-speed and multi-speed regimes follow from the same construction, which remains externally verifiable against the stated model assumptions.
Axiom & Free-Parameter Ledger
free parameters (2)
- Poisson intensity λ
- Speed(s) v
axioms (2)
- domain assumption Initial locations form a homogeneous Poisson point process on the plane.
- domain assumption Each station moves with constant velocity in a uniformly random direction.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The analysis is based on a specific system of non compact particles... identification of the three dimensional state variables that 'Markovize' the association dynamics.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
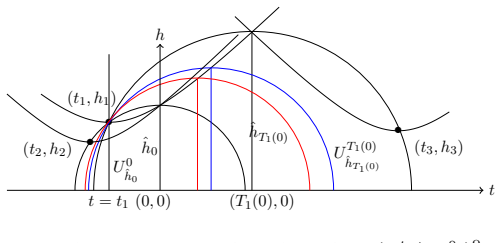
radial bird closed set C(R,α) := {(t,f((R,α),t)) : t∈R} ... h² - v²(t + R/v cos α)² = R² sin² α
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Seasonal Statistics of Shannon Capacity in a Dynamical Poisson-Voronoi Cellular Network
Analysis of Shannon capacity statistics at handover, proximity, and interference epochs in a dynamical Poisson-Voronoi network with an analogy to seasonal fluctuations in signal quality.
Reference graph
Works this paper leans on
-
[1]
G. Albers and T. Roos. Voronoi diagrams of moving points in higher dimensional spaces.Lecture Notes in Computer Science, vol. 621. (Proceedings of the Third Scandinavian Workshop on Algorithm Theory, SWAT 1992. Springer, Berlin, Heidelberg
work page 1992
-
[2]
G. Albers. Three-Dimensional Dynamic Voronoi Diagrams. Diploma thesis, University of W¨ urzburg, 1991
work page 1991
-
[3]
F. Baccelli, B. B laszczyszyn and M. Karray. Random Measures, Point Processes, Stochastic Geometry.Inria, 2020. https://hal.inria.fr/hal-02460214
work page 2020
-
[4]
F. Baccelli and P. Br´ emaud. Elements of Queueing Theory: Palm Martingale Calculus and Stochastic Recurrences. Springer Berlin, Heidelberg, 2003
work page 2003
-
[5]
F. Baccelli and C. S. Choi. A Novel Analytical Model for LEO Satellite Constellations Leveraging Cox Point Processes, IEEE Transactions on Communications, 73(4):2265–2279, 2025
work page 2025
-
[6]
F. Baccelli, M. Klein, M. Lebourges and S. Zuyev. Stochastic geometry and architecture of communication networks. Telecommunication Systems, 7:209–227, 1997
work page 1997
-
[7]
F. Baccelli, P. Madadi and G. de Veciana. Shared Rate Process for Mobile Users in Poisson Networks and Applications. IEEE Transactions on Information Theory, 64(3):2121–2141, 2018
work page 2018
-
[8]
F. Baccelli and S. Zuyev. Stochastic geometry models of mobile communication networks. InFrontiers in Queueing: Models and Applications in Science and Engineering, ed. J. Dshalalow, Chapter 8:227–243. CRC Press, 1996
work page 1996
-
[9]
F. Baccelli and S. Zuyev. Poisson-Voronoi Spanning Trees with Applications to the Optimization of Communication Networks. Oper. Res., 47(4):619–631, 1999
work page 1999
-
[10]
A. Beutel. Interactive Voronoi Diagram Generator with WebGL.https://alexbeutel.com/webgl/voronoi.html, 2012
work page 2012
-
[11]
E. N. Gilbert. Random subdivisions of space into chrystals.Adv. Appl. Prob., 33:958–972, 1962
work page 1962
- [12]
- [13]
-
[14]
J. F. C. Kingman. Poisson Processes,Oxford University Press, USA, 1993
work page 1993
-
[15]
J. Mecke. Formulas for stationary planar fiber processes III—intersection with fiber systems. Math. Oper. Statist. 12:201–210, 1981
work page 1981
-
[16]
R. E. Miles. Sectional Voronoi tessellation.Revista de la Uni´ on Matem´ atica Argentina, 29:310–327, 1984
work page 1984
- [17]
-
[18]
T. Roos. Voronoi diagrams over dynamic scenes.Discrete Appl. Math., 43(3):243–259, 1993
work page 1993
-
[19]
T. Roos. Dynamic Voronoi diagrams. Ph.D. Thesis, University of W¨ urzburg, 1991
work page 1991
-
[20]
L. Muche. Contact and Chord Length Distribution Functions of the Poisson-Voronoi Tessellation in High Dimensions. Adv. Appl. Probab.42(1):48–68, 2010
work page 2010
-
[21]
L. Muche and D. Stoyan. Contact and chord length distributions of the Poisson Voronoi tessellation.J. Appl. Prob., 29:467–471, 1992
work page 1992
- [22]
- [23]
-
[24]
N. Okati. Modeling and Analysis of Massive Low Earth Orbit Communication Networks. Ph.D. Thesis, Tempere University:https://trepo.tuni.fi/handle/10024/146346, 2023
work page 2023
-
[25]
C. Palm. Intensit¨ atsschwankungen im fernsprechverkehr.Ericsson Technics, 1943
work page 1943
-
[26]
D. Stoyan. Comparison Methods for Queues and other Stochastic Models.J. Wiley and Sons, Chichester, 1983. (FB)MATHNET, INRIA Paris, 48 Rue Barrault, 75013 Paris, France, and INFRES, T ´el´ecom Paris, 19, place Marguerite Perey, 91123 Palaiseau, France Email address:francois.baccelli@inria.fr (SKJ)INFRES, T ´el´ecom Paris, 19, place Marguerite Perey, 91123...
work page 1983
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.