Implicit Neural Field-Based Process Planning for Multi-Axis Manufacturing: Direct Control over Collision Avoidance and Toolpath Geometry
Pith reviewed 2026-05-17 22:15 UTC · model grok-4.3
The pith
Sinusoidally activated neural networks represent layers and toolpaths as implicit fields for direct collision avoidance and joint optimization in multi-axis manufacturing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
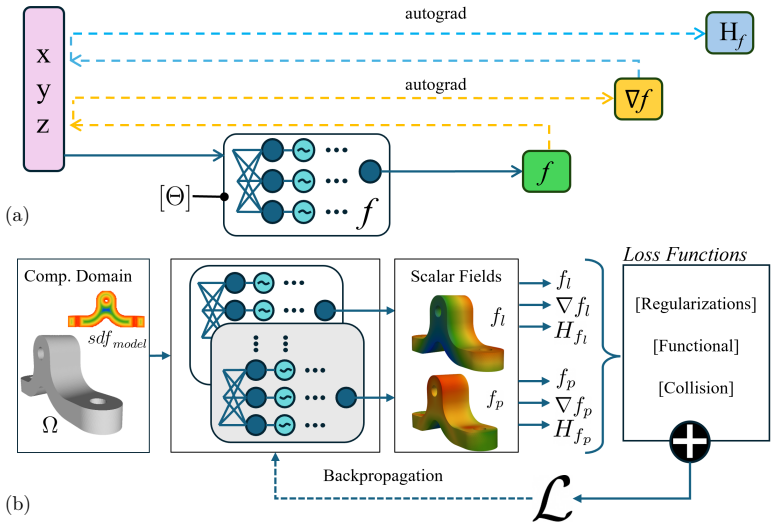
Representing manufacturing layers and toolpaths as implicit fields using sinusoidally activated neural networks enables direct evaluation of field values and derivatives at arbitrary spatial points, which in turn permits explicit collision avoidance and joint optimization within a unified differentiable pipeline.
What carries the argument
Sinusoidally activated neural networks representing layers and toolpaths as implicit fields, allowing point-wise queries of values and derivatives for optimization.
If this is right
- Collisions are avoided explicitly during the optimization process instead of indirectly or post hoc.
- Layers and toolpaths are optimized jointly rather than sequentially.
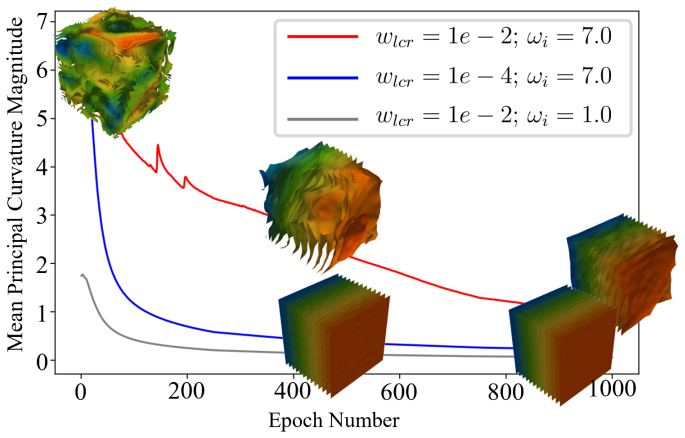
- Network hyperparameters can be used to regularize and control singularities and topology transitions.
- The framework applies across additive and subtractive manufacturing tasks.
- Toolpath geometry is controlled directly during planning.
Where Pith is reading between the lines
- This representation might allow easier integration with simulation or feedback control loops in robotic manufacturing systems.
- If the implicit fields generalize well, the method could reduce the need for manual intervention in complex part geometries.
- Extensions could include incorporating material properties or thermal effects into the same field representations.
Load-bearing premise
Sinusoidally activated neural networks can accurately and stably represent complex manufacturing geometries such that the joint optimization converges without singularities or unwanted topology changes.
What would settle it
Demonstration of a manufacturing geometry where the neural field representation leads to collision during planned paths or fails to produce valid toolpaths despite optimization.
Figures





















read the original abstract
Existing curved-layer-based process planning methods for multi-axis manufacturing address collisions only indirectly and generate toolpaths in a post-processing step, leaving toolpath geometry uncontrolled during optimization. We present an implicit neural field-based framework for multi-axis process planning that overcomes these limitations by embedding both layer generation and toolpath design within a single differentiable pipeline. Using sinusoidally activated neural networks to represent layers and toolpaths as implicit fields, our method enables direct evaluation of field values and derivatives at any spatial point, thereby allowing explicit collision avoidance and joint optimization of manufacturing layers and toolpaths. We further investigate how network hyperparameters and objective definitions influence singularity behavior and topology transitions, offering built-in mechanisms for regularization and stability control. The proposed approach is demonstrated on examples in both additive and subtractive manufacturing, validating its generality and effectiveness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an implicit neural field-based framework for multi-axis manufacturing process planning in both additive and subtractive contexts. Layers and toolpaths are represented as implicit fields using sinusoidally activated neural networks (SIRENs), enabling a single differentiable pipeline for joint optimization with explicit collision avoidance via direct field and derivative evaluation at arbitrary points. The work includes analysis of network hyperparameters and objective definitions to control singularities and topology transitions, and demonstrates the approach on example parts.
Significance. If the central claims hold with accurate geometry representation and stable optimization, the method would advance the field by replacing indirect or post-processing collision handling with integrated, differentiable control over both layer geometry and toolpath shape. This could yield more efficient plans and better handling of complex multi-axis constraints. The built-in regularization mechanisms for stability are a practical strength.
major comments (2)
- [§4 and §3.2] §4 (Experiments) and §3.2 (Implicit Field Representation): The central claim of 'direct control' via derivative-based collision avoidance rests on SIREN fields producing accurate zero-level sets and normals for complex manufacturing geometries. However, no quantitative evaluation of representation error (e.g., Hausdorff distance, normal deviation, or comparison to ground-truth CAD distance fields) is provided for parts containing sharp edges or thin features. SIREN ringing or smoothing artifacts in such regimes would distort the collision loss, undermining the advantage over post-processing methods. The hyperparameter study addresses singularities but does not quantify this representation fidelity.
- [§3.3] §3.3 (Joint Optimization): The joint optimization of layers and toolpaths assumes convergence without problematic topology transitions or local minima induced by field artifacts. The manuscript should report convergence statistics, failure rates across trials, and sensitivity to initialization, as these directly affect whether the pipeline delivers reliable manufacturing plans.
minor comments (2)
- [Abstract and §1] The abstract and introduction would benefit from a brief comparison table contrasting the proposed pipeline with prior curved-layer methods on the dimensions of collision handling and toolpath control.
- [§3] Notation for the implicit field functions (e.g., layer field vs. toolpath field) should be introduced with explicit definitions and consistent usage across equations.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive feedback on our manuscript. We address each of the major comments below and have incorporated revisions to enhance the clarity and rigor of our claims regarding the accuracy and reliability of the proposed framework.
read point-by-point responses
-
Referee: [§4 and §3.2] §4 (Experiments) and §3.2 (Implicit Field Representation): The central claim of 'direct control' via derivative-based collision avoidance rests on SIREN fields producing accurate zero-level sets and normals for complex manufacturing geometries. However, no quantitative evaluation of representation error (e.g., Hausdorff distance, normal deviation, or comparison to ground-truth CAD distance fields) is provided for parts containing sharp edges or thin features. SIREN ringing or smoothing artifacts in such regimes would distort the collision loss, undermining the advantage over post-processing methods. The hyperparameter study addresses singularities but does not quantify this representation fidelity.
Authors: We agree that quantitative metrics for representation fidelity are important to substantiate the central claims. Although the hyperparameter study in the original manuscript provides indirect evidence through successful manufacturing outcomes, we acknowledge the value of direct error quantification. In the revised manuscript, we have added quantitative evaluations including Hausdorff distances and average normal deviations for the implicit representations against ground-truth CAD models for all demonstrated parts. These results are now reported in a new table in §4, showing that representation errors remain within acceptable manufacturing tolerances even for geometries with sharp edges and thin features. revision: yes
-
Referee: [§3.3] §3.3 (Joint Optimization): The joint optimization of layers and toolpaths assumes convergence without problematic topology transitions or local minima induced by field artifacts. The manuscript should report convergence statistics, failure rates across trials, and sensitivity to initialization, as these directly affect whether the pipeline delivers reliable manufacturing plans.
Authors: We recognize that reporting optimization reliability metrics would better demonstrate the robustness of the joint optimization pipeline. The original manuscript focused on the formulation and qualitative results, but to address this, we have performed additional experiments with multiple random initializations and report the convergence statistics, including success rates (defined as achieving collision-free plans without topology issues), average iterations, and sensitivity analysis in the revised §4. These additions confirm stable convergence in the tested scenarios due to the proposed regularization. revision: yes
Circularity Check
No significant circularity; derivation applies standard neural implicit properties
full rationale
The paper presents a new application of sinusoidally activated neural networks (SIREN) to represent manufacturing layers and toolpaths as implicit fields within a differentiable pipeline. Direct evaluation of field values and derivatives for collision avoidance follows from the established differentiability of such networks rather than any self-definitional reduction, fitted input renamed as prediction, or load-bearing self-citation chain. Hyperparameter investigation and regularization are described as empirical controls on singularities, not as justifications that loop back to the inputs. The central claims retain independent content as an engineering framework for joint layer/toolpath optimization in additive and subtractive manufacturing.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Sinusoidally activated neural networks can represent layers and toolpaths as implicit fields suitable for direct derivative evaluation and optimization
invented entities (1)
-
Implicit neural fields for joint layer and toolpath representation
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Using sinusoidally activated neural networks to represent layers and toolpaths as implicit fields, our method enables direct evaluation of field values and derivatives at any spatial point, thereby allowing explicit collision avoidance and joint optimization of manufacturing layers and toolpaths.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The Mean curvature K_M and the Gaussian curvature K_G of a layer at a given point are computed following [45]: K_M = ...
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
C. Dai, C. C. L. Wang, C. Wu, S. Lefebvre, G. Fang, Y.-J. Liu, Support- free volume printing by multi-axis motion, ACM Trans. Graph. 37 (4) (2018) 134:1–134:14.doi:10.1145/3197517.3201342. URLhttps://dl.acm.org/doi/10.1145/3197517.3201342
-
[2]
T. Zhang, G. Fang, Y. Huang, N. Dutta, S. Lefebvre, Z. M. Kilic, C. C. L. Wang, S3-Slicer: A General Slicing Framework for Multi- Axis 3D Printing, ACM Trans. Graph. 41 (6) (2022) 277:1–277:15. 62 doi:10.1145/3550454.3555516. URLhttps://doi.org/10.1145/3550454.3555516
-
[3]
T. Liu, T. Zhang, Y. Chen, Y. Huang, C. C. L. Wang, Neural Slicer for Multi-Axis 3D Printing, ACM Trans. Graph. 43 (4) (2024) 85:1–85:15. doi:10.1145/3658212. URLhttps://dl.acm.org/doi/10.1145/3658212
-
[4]
J. Etienne, N. Ray, D. Panozzo, S. Hornus, C. C. L. Wang, J. Martínez, S. McMains, M. Alexa, B. Wyvill, S. Lefebvre, CurviSlicer: slightly curved slicing for 3-axis printers, ACM Trans. Graph. 38 (4) (2019) 81:1–81:11.doi:10.1145/3306346.3323022. URLhttps://dl.acm.org/doi/10.1145/3306346.3323022
-
[5]
Y. Yao, L. Cheng, Z. Li, A comparative review of multi-axis 3D printing, Journal of Manufacturing Processes 120 (2024) 1002–1022. doi:10.1016/j.jmapro.2024.04.084. URLhttps://www.sciencedirect.com/science/article/pii/ S1526612524004432
-
[6]
G. Fang, T. Zhang, S. Zhong, X. Chen, Z. Zhong, C. C. L. Wang, Rein- forced FDM: multi-axis filament alignment with controlled anisotropic strength, ACMTrans.Graph.39(6)(2020)204:1–204:15.doi:10.1145/ 3414685.3417834. URLhttps://dl.acm.org/doi/10.1145/3414685.3417834
-
[7]
Y. Li, D. He, S. Yuan, K. Tang, J. Zhu, Vector field-based curved layer slicing and path planning for multi-axis printing, Robotics and Computer-Integrated Manufacturing 77 (2022) 102362. doi:10.1016/j.rcim.2022.102362. URLhttps://www.sciencedirect.com/science/article/pii/ S0736584522000503
-
[8]
G. Fang, T. Zhang, Y. Huang, Z. Zhang, K. Masania, C. C. L. Wang, Exceptional mechanical performance by spatial printing with continuous fiber: Curved slicing, toolpath generation and physical verification, Additive Manufacturing 82 (2024) 104048. doi:10.1016/j.addma.2024.104048. URLhttps://www.sciencedirect.com/science/article/pii/ S2214860424000940 63
-
[9]
T. Zhang, T. Liu, N. Dutta, Y. Chen, R. Su, Z. Zhang, W. Wang, C. C. L. Wang, Toolpath generation for high density spatial fiber printing guided by principal stresses, Composites Part B: Engineering 295 (2025) 112154.doi:10.1016/j.compositesb.2025.112154. URLhttps://www.sciencedirect.com/science/article/pii/ S1359836825000447
-
[10]
T. Liu, T. Zhang, Y. Chen, W. Wang, Y. Jiang, Y. Huang, C. C. L. Wang, Neural Co-Optimization of Structural Topology, Manufac- turable Layers, and Path Orientations for Fiber-Reinforced Composites, arXiv:2505.03779 [cs] (Apr. 2025).doi:10.48550/arXiv.2505.03779. URLhttp://arxiv.org/abs/2505.03779
-
[11]
C. J. Brampton, K. C. Wu, H. A. Kim, New optimization method for steered fiber composites using the level set method, Structural and Multidisciplinary Optimization 52 (3) (2015) 493–505.doi:10.1007/ s00158-015-1256-6. URLhttps://doi.org/10.1007/s00158-015-1256-6
-
[12]
F. Fernandez, W. S. Compel, J. P. Lewicki, D. A. Tortorelli, Optimal design of fiber reinforced composite structures and their direct ink write fabrication, Computer Methods in Applied Mechanics and Engineering 353 (2019) 277–307.doi:10.1016/j.cma.2019.05.010. URLhttps://linkinghub.elsevier.com/retrieve/pii/ S0045782519302798
-
[13]
X. Chen, G. Fang, W.-H. Liao, C. C. Wang, Field-Based Toolpath Generation for 3D Printing Continuous Fibre Reinforced Ther- moplastic Composites, Additive Manufacturing 49 (2022) 102470. doi:10.1016/j.addma.2021.102470. URLhttps://linkinghub.elsevier.com/retrieve/pii/ S2214860421006205
-
[14]
V. Sitzmann, J. Martel, A. Bergman, D. Lindell, G. Wetzstein, Im- plicit Neural Representations with Periodic Activation Functions, in: Advances in Neural Information Processing Systems, Vol. 33, Curran Associates, Inc., 2020, pp. 7462–7473. URLhttps://proceedings.neurips.cc/paper/2020/hash/ 53c04118df112c13a8c34b38343b9c10-Abstract.html 64
work page 2020
-
[15]
G. Parascandolo, H. Huttunen, T. Virtanen, Taming the waves: sine as activation function in deep neural networks (Nov. 2016). URLhttps://openreview.net/forum?id=Sks3zF9eg
work page 2016
-
[16]
T. Yeom, S. Lee, J. Lee, Fast Training of Sinusoidal Neural Fields via Scaling Initialization, 2024. URLhttps://openreview.net/forum?id=Sr5XaZzirA
work page 2024
-
[17]
I. Gibson, D. Rosen, B. Stucker, Additive Manufacturing Technologies: 3D Printing, Rapid Prototyping, and Direct Digital Manufacturing, Springer, New York, NY, 2015.doi:10.1007/978-1-4939-2113-3. URLhttps://link.springer.com/10.1007/978-1-4939-2113-3
-
[18]
X. Chermain, G. Cocco, C. Zanni, E. Garner, P. A. Hugron, S. Lefebvre, Atomizer: Beyond Non-Planar Slicing for Fused Fila- ment Fabrication, Computer Graphics Forum 44 (5) (2025) e70189. doi:10.1111/cgf.70189. URLhttps://onlinelibrary.wiley.com/doi/abs/10.1111/cgf. 70189
-
[19]
I. Cho, K. Lee, J. Kim, Generation of collision-free cutter location data in five-axis milling using the potential energy method, The International Journal of Advanced Manufacturing Technology 13 (8) (1997) 523–529. doi:10.1007/BF01176295. URLhttps://doi.org/10.1007/BF01176295
-
[20]
M. Balasubramaniam, Automatic 5-axis NC toolpath generation, Thesis, Massachusetts Institute of Technology, accepted: 2005-10- 14T19:17:29Z ISSN: 5014-0264 Journal Abbreviation: Automatic five- axis NC toolpath generation (2001). URLhttps://dspace.mit.edu/handle/1721.1/29225
work page 2005
-
[21]
K. Zhang, K. Tang, Optimal five-axis tool path generation algorithm based on double scalar fields for freeform surfaces, The International Journal of Advanced Manufacturing Technology 83 (9-12) (2016) 1503– 1514.doi:10.1007/s00170-015-7646-5. URLhttp://link.springer.com/10.1007/s00170-015-7646-5
-
[22]
F. Liang, C. Kang, F. Fang, A review on tool orientation planning in multi-axis machining, International Journal of Production Research 65 59 (18) (2021) 5690–5720.doi:10.1080/00207543.2020.1786187. URLhttps://doi.org/10.1080/00207543.2020.1786187
-
[23]
J. Zaragoza Chichell, A. Rečková, M. Bizzarri, M. Bartoň, Collision-free Tool Motion Planning for 5-Axis CNC Machining with Toroidal Cutters, Computer-Aided Design 173 (2024) 103725. doi:10.1016/j.cad.2024.103725. URLhttps://www.sciencedirect.com/science/article/pii/ S0010448524000526
-
[24]
D. He, Y. Li, Z. Li, K. Tang, Geodesic Distance Field-Based Pro- cess Planning for Five-Axis Machining of Complicated Parts, Journal of Manufacturing Science and Engineering 143 (061009) (Jan. 2021). doi:10.1115/1.4048956. URLhttps://doi.org/10.1115/1.4048956
-
[25]
A. Mahdavi-Amiri, F. Yu, H. Zhao, A. Schulz, H. Zhang, VDAC: vol- ume decompose-and-carve for subtractive manufacturing, ACM Trans. Graph. 39 (6) (2020) 203:1–203:15.doi:10.1145/3414685.3417772. URLhttps://doi.org/10.1145/3414685.3417772
-
[26]
N. Dutta, T. Zhang, G. Fang, I. E. Yigit, C. C. L. Wang, Vector Field- Based Volume Peeling for Multi-Axis Machining, Journal of Computing and Information Science in Engineering 24 (051001) (Dec. 2023).doi: 10.1115/1.4063861. URLhttps://doi.org/10.1115/1.4063861
-
[27]
J. R. Kubalak, A. L. Wicks, C. B. Williams, Simultaneous topology and toolpath optimization for layer-free multi-axis additive manufacturing of 3D composite structures, Additive Manufacturing 104 (2025) 104774. doi:10.1016/j.addma.2025.104774. URLhttps://www.sciencedirect.com/science/article/pii/ S2214860425001381
-
[28]
T. Y. Lau, L. Chen, D. He, Z. Li, K. Tang, Partition-based Print Se- quence Planning and Adaptive Slicing for Scalar Field-based Multi-axis Additive Manufacturing, Computer-Aided Design 163 (2023) 103576. doi:10.1016/j.cad.2023.103576. URLhttps://www.sciencedirect.com/science/article/pii/ S0010448523001082 66
-
[29]
D. P. V. J. Jayakody, T. Y. Lau, H. Kim, K. Tang, L. E. Thomas-Seale, Topological awareness towards collision-free multi-axis curved layer additive manufacturing, Additive Manufacturing 88 (2024) 104247. doi:10.1016/j.addma.2024.104247. URLhttps://linkinghub.elsevier.com/retrieve/pii/ S2214860424002938
- [30]
-
[31]
G. Liu, W. Huang, Y. Wang, H. Ren, G. Zhang, L. Zhou, Y. Xiong, Stress field-aware infill toolpath generation for additive manufacturing of continuous fiber reinforced polymer composites, Materials & Design 239 (2024) 112756.doi:10.1016/j.matdes.2024.112756. URLhttps://www.sciencedirect.com/science/article/pii/ S026412752400128X
-
[32]
T. Wang, N. Li, G. Link, J. Jelonnek, J. Fleischer, J. Dit- tus, D. Kupzik, Load-dependent path planning method for 3D printing of continuous fiber reinforced plastics, Composites Part A: Applied Science and Manufacturing 140 (2021) 106181. doi:10.1016/j.compositesa.2020.106181. URLhttps://www.sciencedirect.com/science/article/pii/ S1359835X2030419X
-
[33]
Y.-R. Luo, R. Hewson, M. Santer, Spatially optimised fibre-reinforced composites with isosurface-controlled additive manufacturing con- straints, Structural and Multidisciplinary Optimization 66 (6) (2023) 130.doi:10.1007/s00158-023-03586-w. URLhttps://doi.org/10.1007/s00158-023-03586-w
-
[34]
Y. Xu, Y. Gao, C. Wu, J. Fang, G. Sun, G. P. Steven, Q. Li, Concurrent optimization of topological configuration and continuous fiber path for composite structures — A unified level set approach, Computer Methods in Applied Mechanics and Engineering 399 (2022) 115350. doi:10.1016/j.cma.2022.115350. URLhttps://www.sciencedirect.com/science/article/pii/ S00...
-
[35]
H. Ren, D. Wang, G. Liu, D. W. Rosen, Y. Xiong, Concurrent optimization of structural topology and toolpath for additive manu- facturing of continuous fiber-reinforced polymer composites, Computer Methods in Applied Mechanics and Engineering 430 (2024) 117227. doi:10.1016/j.cma.2024.117227. URLhttps://www.sciencedirect.com/science/article/pii/ S0045782524004833
-
[36]
T. R. Brooks, J. R. R. A. Martins, On manufacturing constraints for tow-steered composite design optimization, Composite Structures 204 (2018) 548–559.doi:10.1016/j.compstruct.2018.07.100. URLhttps://www.sciencedirect.com/science/article/pii/ S0263822318308158
-
[37]
W. Qu, R. He, L. Cheng, D. Yang, J. Gao, H. Wang, Q. Yang, Y. Ke, Placement suitability analysis of automated fiber place- ment on curved surfaces considering the influence of prepreg tow, roller and AFP machine, Composite Structures 262 (2021) 113608. doi:10.1016/j.compstruct.2021.113608. URLhttps://www.sciencedirect.com/science/article/pii/ S0263822321000696
-
[38]
J. A. Halbritter, Leveraging Automated Fiber Placement Computer Aided Process Planning Framework for Defect Validation and Dynamic Layup Strategies, Ph.D. thesis, nTRS Author Affiliations: University of South Carolina NTRS Document ID: 20230003207 NTRS Research Center: Langley Research Center (LaRC) (May 2023). URLhttps://ntrs.nasa.gov/citations/20230003207
-
[39]
X. Xiao, W. Qu, D. Yang, H. Hu, F. Zhang, Y. Ke, Field- based partition path planning for automated fiber placement on complex surfaces via combinatorial optimization, Composites Part A: Applied Science and Manufacturing 197 (2025) 109049. doi:10.1016/j.compositesa.2025.109049. URLhttps://www.sciencedirect.com/science/article/pii/ S1359835X25003434
-
[40]
Why Deep Neural Networks for Function Approximation?
S. Liang, R. Srikant, Why Deep Neural Networks for Function Approx- imation?, arXiv:1610.04161 [cs] (Mar. 2017).doi:10.48550/arXiv. 68 1610.04161. URLhttp://arxiv.org/abs/1610.04161
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv 2017
-
[41]
Y. Liao, S. Donne, A. Geiger, Deep Marching Cubes: Learning Explicit Surface Representations, in: 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, IEEE, Salt Lake City, UT, 2018, pp. 2916–2925.doi:10.1109/cvpr.2018.00308. URLhttps://ieeexplore.ieee.org/document/8578406/
- [42]
-
[43]
H.-T. D. Liu, F. Williams, A. Jacobson, S. Fidler, O. Litany, Learn- ing Smooth Neural Functions via Lipschitz Regularization, in: ACM SIGGRAPH 2022 Conference Proceedings, SIGGRAPH ’22, Associa- tion for Computing Machinery, New York, NY, USA, 2022, pp. 1–13. doi:10.1145/3528233.3530713. URLhttps://doi.org/10.1145/3528233.3530713
- [44]
-
[45]
R. Goldman, Curvature formulas for implicit curves and sur- faces, Computer Aided Geometric Design 22 (7) (2005) 632–658. doi:10.1016/j.cagd.2005.06.005. URLhttps://www.sciencedirect.com/science/article/pii/ S0167839605000737
-
[46]
V. Nair, G. E. Hinton, Rectified linear units improve restricted boltz- mann machines, in: Proceedings of the 27th international conference on machine learning (ICML-10), 2010, pp. 807–814
work page 2010
-
[47]
J. R. Conway, A. L. Darling, C. A. Ernesto, R. T. Farouki, C. A. Palo- mares, Experimental study of contouring accuracy for cnc machines ex- ecuting curved paths with constant and curvature-dependent feedrates, 69 Robotics and Computer-Integrated Manufacturing 29 (2) (2013) 357– 369
work page 2013
-
[48]
Y. Chen, T. Zhang, Y. Huang, T. Liu, C. C. Wang, Co-optimization of tool orientations, kinematic redundancy, and waypoint timing for robot- assisted manufacturing, IEEE Transactions on Automation Science and Engineering (2025)
work page 2025
- [49]
-
[50]
S. Lim, R. A. Buswell, P. J. Valentine, D. Piker, S. A. Austin, X. De Kestelier, Modelling curved-layered printing paths for fabricating large-scale construction components, Additive Manufacturing 12 (2016) 216–230
work page 2016
-
[51]
Advanced skills through multiple adversarial motion priors in rein- forcement learning
T. Zhang, Y. Huang, P. Kukulski, N. Dutta, G. Fang, C. C. Wang, Support Generation for Robot-Assisted 3D Printing with Curved Lay- ers, in: 2023 IEEE International Conference on Robotics and Automa- tion (ICRA), 2023, pp. 12338–12344.doi:10.1109/ICRA48891.2023. 10161432. URLhttps://ieeexplore.ieee.org/document/10161432
-
[52]
D. P. Kingma, J. Ba, Adam: A method for stochastic optimization, International Conference on Learning Representations (2015). URLhttps://arxiv.org/abs/1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2015
- [53]
-
[54]
J. J. Park, P. Florence, J. Straub, R. Newcombe, S. Lovegrove, DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation, in: 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, Long Beach, CA, USA, 2019, pp. 165–174.doi:10.1109/cvpr.2019.00025. URLhttps://ieeexplore.ieee.org/document/8954065/ 70
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.