Context-Aware Model Predictive Control for Microgrid Energy Management via LLMs
Pith reviewed 2026-05-17 00:34 UTC · model grok-4.3
The pith
An LLM with a tunable last layer converts microgrid text context into disturbance predictions that improve model predictive control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
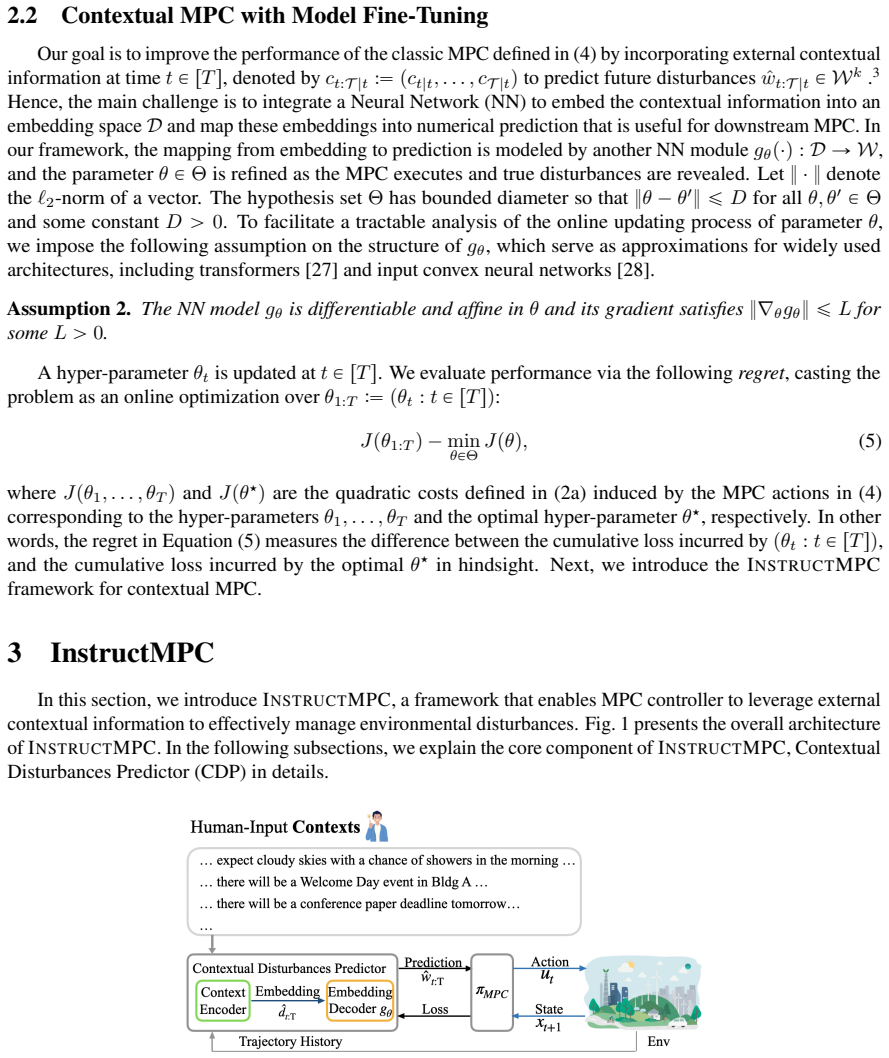
The InstructMPC framework utilizes a Large Language Model paired with a tunable last layer mapping to translate unstructured operational context into predictive disturbance trajectories for the MPC controller. Unlike conventional forecasting methods, the proposed approach treats the last layer mapping as a tunable component, refined online based on the realized control cost. We establish a theoretical foundation for this closed-loop tuning strategy, proving a regret bound of O(sqrt(T log T)) for linear systems under a tailored task-aware loss function, together with robustness guarantees against uninformative or noisy textual inputs. The control strategy is experimentally validated on OpenC.
What carries the argument
The tunable last layer mapping that refines LLM-generated context into predictive disturbance trajectories and is updated online from realized MPC costs.
If this is right
- The method reduces cumulative grid electricity costs in microgrids that combine fluctuating renewable generation and battery storage.
- A regret bound of O(sqrt(T log T)) holds for linear systems when the last layer is tuned with the task-aware loss.
- Robustness guarantees protect performance against uninformative or noisy textual inputs.
- Semantic context receives a formal interface into the physical control loop without replacing existing MPC solvers.
Where Pith is reading between the lines
- The same LLM-plus-tunable-layer pattern could be tested in other stochastic control settings that already produce textual logs, such as building energy or traffic signal timing.
- Online cost-based tuning of the final layer offers a general template for safely inserting language-model components into existing model-based controllers.
- Scalability questions remain open: performance under different microgrid sizes or with smaller open-source LLMs would clarify practical limits.
Load-bearing premise
The LLM can reliably convert unstructured textual context into useful predictive disturbance trajectories that improve MPC performance when the last layer is tuned online based on realized costs.
What would settle it
If running InstructMPC on the OpenCEM microgrid dataset shows no significant drop in cumulative grid electricity costs relative to standard context-agnostic MPC, or if the observed regret exceeds O(sqrt(T log T)) under the task-aware loss.
Figures



read the original abstract
The optimal operation of modern microgrids, particularly those integrating stochastic renewable generation and battery energy storage system (BESS), relies heavily on load and disturbances forecasting to minimize operational costs. However, in environments with uncertainties in both generation and consumption, traditional numerical forecasting methods often fail to capture generation shifts and event-driven load surges. While contextual information regarding event schedules, system logs, and computational task records is easily obtainable, classic control paradigms lack a formal interface to integrate the unstructured, semantic data into the physical operation loop. This paper addresses this gap by introducing the InstructMPC framework, which utilizes a Large Language Model (LLM) paired with a tunable last layer mapping to translate unstructured operational context into predictive disturbance trajectories for the MPC controller. Unlike conventional forecasting methods, the proposed approach treats the last layer mapping as a tunable component, refined online based on the realized control cost. We establish a theoretical foundation for this closed-loop tuning strategy, proving a regret bound of $O(\sqrt{T \log T})$ for linear systems under a tailored task-aware loss function, together with robustness guarantees against uninformative or noisy textual inputs. The control strategy is experimentally validated on OpenCEM, a real-world microgrid with highly fluctuating generation and consumption. Experimental results demonstrate that the LLM-driven MPC significantly reduces cumulative grid electricity costs compared to classical context-agnostic baselines, validating the efficacy of integrating semantic information directly into physical control loops.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the InstructMPC framework, which pairs a large language model with a tunable last-layer mapping to translate unstructured operational context (event schedules, logs) into predictive disturbance trajectories for MPC-based microgrid energy management. The central claims are a regret bound of O(√(T log T)) for linear systems under a tailored task-aware loss, robustness guarantees against noisy textual inputs, and experimental cost reductions on the OpenCEM microgrid relative to context-agnostic baselines.
Significance. If the regret analysis holds, the work would provide a principled interface between semantic context and closed-loop control, with potential impact on stochastic systems such as renewable-integrated microgrids. The online tuning of the last layer and the claimed regret rate distinguish the approach from purely heuristic LLM integrations, while the real-world validation on OpenCEM supplies practical evidence of cost savings.
major comments (2)
- [Theoretical analysis / regret bound] Theoretical section on regret bound: The claimed O(√(T log T)) regret relies on the task-aware loss being convex (or satisfying standard curvature conditions) in the last-layer parameters so that online gradient descent arguments apply. However, disturbance trajectories enter the MPC optimization as parameters; even for linear dynamics and quadratic stage costs the resulting closed-loop value function is piecewise quadratic and non-convex in the forecast. The manuscript does not indicate whether a convex surrogate loss is substituted or how the true realized cost is shown to preserve the required properties. This convexity gap is load-bearing for both the regret rate and the robustness guarantees that rest on the same tuning mechanism.
- [Abstract / Experimental results] Abstract and § on experimental validation: The abstract states that the LLM-driven MPC yields significant reductions in cumulative grid electricity costs on OpenCEM, yet no quantitative values, baseline definitions, or statistical controls (e.g., number of trials, confidence intervals) are supplied in the provided text. Without these details the empirical support for the central claim cannot be assessed.
minor comments (2)
- [Abstract] Notation: The term 'task-aware loss function' is introduced without an explicit mathematical definition or reference to the precise functional form used in the regret proof.
- [Method description] The manuscript would benefit from a short paragraph clarifying how the last-layer parameters are updated online (e.g., gradient step size, projection) to make the tuning procedure reproducible.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback on our manuscript. We address each major comment point by point below, providing clarifications where possible and indicating planned revisions to improve the paper.
read point-by-point responses
-
Referee: [Theoretical analysis / regret bound] Theoretical section on regret bound: The claimed O(√(T log T)) regret relies on the task-aware loss being convex (or satisfying standard curvature conditions) in the last-layer parameters so that online gradient descent arguments apply. However, disturbance trajectories enter the MPC optimization as parameters; even for linear dynamics and quadratic stage costs the resulting closed-loop value function is piecewise quadratic and non-convex in the forecast. The manuscript does not indicate whether a convex surrogate loss is substituted or how the true realized cost is shown to preserve the required properties. This convexity gap is load-bearing for both the regret rate and the robustness guarantees that rest on the same tuning mechanism.
Authors: We thank the referee for identifying this critical aspect of the analysis. The task-aware loss is explicitly constructed as a convex quadratic surrogate in the last-layer parameters, measuring the discrepancy between the LLM-predicted disturbance trajectory and the realized disturbance; this convexity enables direct application of online gradient descent to obtain the stated O(√(T log T)) regret bound with respect to the surrogate. We acknowledge that the manuscript does not sufficiently detail the relationship between this surrogate and the true closed-loop MPC cost, which is indeed piecewise quadratic. In the revision we will add a dedicated paragraph in the theoretical section explaining the surrogate construction, the conditions (linear dynamics, quadratic costs, and bounded disturbances) under which the surrogate regret implies a comparable bound on the true cost, and any additional assumptions required for the robustness guarantees. revision: yes
-
Referee: [Abstract / Experimental results] Abstract and § on experimental validation: The abstract states that the LLM-driven MPC yields significant reductions in cumulative grid electricity costs on OpenCEM, yet no quantitative values, baseline definitions, or statistical controls (e.g., number of trials, confidence intervals) are supplied in the provided text. Without these details the empirical support for the central claim cannot be assessed.
Authors: We agree that the abstract and experimental validation section would benefit from explicit quantitative details to allow proper assessment of the claims. The full experimental results in the manuscript compare InstructMPC against context-agnostic MPC and traditional forecasting baselines on the OpenCEM microgrid, reporting specific cumulative cost reductions together with the simulation horizon, number of Monte Carlo trials, and variability measures. We will revise the abstract to include key numerical outcomes (e.g., percentage cost savings relative to baselines) and ensure the experimental section explicitly states the number of trials, confidence intervals, and baseline definitions. revision: yes
Circularity Check
No significant circularity; theoretical regret bound presented as independent derivation
full rationale
The paper claims to prove an O(sqrt(T log T)) regret bound for linear systems under a tailored task-aware loss, along with robustness guarantees, as part of the closed-loop tuning strategy for the last-layer mapping. This is framed as a theoretical foundation derived from the setup rather than reducing to fitted inputs renamed as predictions, self-definitional loops, or load-bearing self-citations. No equations or steps in the abstract or description exhibit the specific reductions required for circularity flags (e.g., convexity assumed without surrogate or external verification). Experimental results on OpenCEM provide separate empirical content. The derivation is therefore self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- last layer mapping parameters
axioms (1)
- domain assumption The underlying plant is linear for the regret bound to hold
Reference graph
Works this paper leans on
-
[1]
J. S. Ali, Y . Qiblawey, A. Alassi, A. M. Massoud, S. M. Muyeen, and H. Abu-Rub, “Power system stability with high penetration of renewable energy sources: Challenges, assessment, and mitigation strategies,” IEEE Access, vol. 13, pp. 39 912–39 934, 2025
work page 2025
-
[2]
P. Apablaza, S. Püschel-Løvengreen, R. Moreno, and P. Mancarella, “Valuing distributed energy resources flexibility in an uncertain and risk-aware low-carbon power system planning context,”Sustainable Energy, Grids and Networks, p. 101850, 2025
work page 2025
-
[3]
Unraveling the dynamic characteristics of inertia fluctuations in modern power systems,
X. Nie and H. Tang, “Unraveling the dynamic characteristics of inertia fluctuations in modern power systems,”IEEE Access, vol. 13, pp. 169 628–169 635, 2025
work page 2025
-
[4]
C. Dongyang, Z. Jiewen, and H. Xiaolong, “Dynamic adaptation in power transmission: integrating robust optimization with online learning for renewable uncertainties,”Frontiers in Energy Research, vol. 12, p. 1483170, 2024
work page 2024
-
[5]
Learning-based predictive control via real-time aggregate flexibility,
T. Li, B. Sun, Y . Chen, Z. Ye, S. H. Low, and A. Wierman, “Learning-based predictive control via real-time aggregate flexibility,”IEEE Transactions on Smart Grid, vol. 12, no. 6, pp. 4897–4913, 2021
work page 2021
-
[6]
Learning-augmented control: Adaptively confidence learning for competitive mpc,
T. Li, “Learning-augmented control: Adaptively confidence learning for competitive mpc,”arXiv preprint arXiv:2507.14595, 2025
-
[7]
All you need to know about model predictive control for buildings,
J. Drgoˇna, J. Arroyo, I. C. Figueroa, D. Blum, K. Arendt, D. Kim, E. P. Ollé, J. Oravec, M. Wetter, D. L. Vrabieet al., “All you need to know about model predictive control for buildings,”Annual Reviews in Control, vol. 50, pp. 190–232, 2020
work page 2020
-
[8]
Experimental validation of safe mpc for autonomous driving in uncertain environments,
I. Batkovic, A. Gupta, M. Zanon, and P. Falcone, “Experimental validation of safe mpc for autonomous driving in uncertain environments,”IEEE Transactions on Control Systems Technology, vol. 31, no. 5, pp. 2027–2042, 2023
work page 2027
-
[9]
Coordination of autonomous vehicles using a mixed- integer lpv-mpc planner,
S. E. Samada, V . Puig, F. Nejjari, and R. Sarrate, “Coordination of autonomous vehicles using a mixed- integer lpv-mpc planner,” in2024 IEEE 63rd Conference on Decision and Control (CDC), Dec 2024, pp. 7240–7245
work page 2024
-
[10]
Robust data-driven predictive control for unknown linear systems with bounded disturbances,
K. Hu and T. Liu, “Robust data-driven predictive control for unknown linear systems with bounded disturbances,”IEEE Transactions on Automatic Control, vol. 70, no. 10, pp. 6529–6544, 2025
work page 2025
-
[11]
J. Shi, C. Salzmann, and C. N. Jones, “Disturbance-adaptive data-driven predictive control: Trading comfort violations for savings in building climate control,” 2025. [Online]. Available: https://arxiv.org/abs/2412.09238
-
[12]
Occupancy-based hvac control systems in buildings: A state-of-the-art review,
M. Esrafilian-Najafabadi and F. Haghighat, “Occupancy-based hvac control systems in buildings: A state-of-the-art review,”Building and Environment, vol. 197, p. 107810, 2021
work page 2021
-
[13]
A. Doma, M. M. Ouf, F. Amara, N. Morovat, and A. K. Athienitis, “Occupancy-informed predictive control strategies for enhancing the energy flexibility of grid-interactive buildings,”Energy and Buildings, vol. 332, p. 115388, 2025
work page 2025
-
[14]
A machine-learning-based event-triggered model predictive control for building energy management,
S. Yang, W. Chen, and M. P. Wan, “A machine-learning-based event-triggered model predictive control for building energy management,”Building and Environment, vol. 233, p. 110101, 2023. 12
work page 2023
-
[15]
C. Hong, Y . Fu, L. Chen, J. Tao, Z. Liang, L. Wei, Y . Yang, Q. Ban, and S. Wu, “Switched event- triggering secondary frequency control of power systems considering wind and solar stochastics under denial of service attack,” in2024 IEEE PES 16th Asia-Pacific Power and Energy Engineering Conference (APPEEC), 2024, pp. 1–5
work page 2024
-
[16]
Semantically informed mpc for context-aware robot exploration,
Y . Goel, N. Vaskevicius, L. Palmieri, N. Chebrolu, K. O. Arras, and C. Stachniss, “Semantically informed mpc for context-aware robot exploration,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 11 218–11 225
work page 2023
-
[17]
Contextual tuning of model predictive control for autonomous racing,
L. P. Fröhlich, C. Küttel, E. Arcari, L. Hewing, M. N. Zeilinger, and A. Carron, “Contextual tuning of model predictive control for autonomous racing,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 10 555–10 562
work page 2022
-
[18]
Efficient context-aware model predictive control for human-aware navigation,
E. Stefanini, L. Palmieri, A. Rudenko, T. Hielscher, T. Linder, and L. Pallottino, “Efficient context-aware model predictive control for human-aware navigation,”IEEE Robotics and Automation Letters, 2024
work page 2024
-
[19]
Languagempc: Large language models as decision makers for autonomous driving,
H. Sha, Y . Mu, Y . Jiang, L. Chen, C. Xu, P. Luo, S. E. Li, M. Tomizuka, W. Zhan, and M. Ding, “Languagempc: Large language models as decision makers for autonomous driving,”arXiv preprint arXiv:2310.03026, 2023
-
[20]
Chatmpc: Natural language based mpc personalization,
Y . Miyaoka, M. Inoue, and T. Nii, “Chatmpc: Natural language based mpc personalization,” in2024 American Control Conference (ACC). IEEE, 2024, pp. 3598–3603
work page 2024
-
[21]
Instructmpc: A human-llm-in-the-loop framework for context-aware control,
R. Wu, J. Ai, and T. Li, “Instructmpc: A human-llm-in-the-loop framework for context-aware control,” in 2025 IEEE 64rd Conference on Decision and Control (CDC), Dec 2025
work page 2025
-
[22]
Competitive control with delayed imperfect information,
C. Yu, G. Shi, S.-J. Chung, Y . Yue, and A. Wierman, “Competitive control with delayed imperfect information,” in2022 American Control Conference (ACC). IEEE, 2022, pp. 2604–2610
work page 2022
-
[23]
Robustness and consistency in linear quadratic control with untrusted predictions,
T. Li, R. Yang, G. Qu, G. Shi, C. Yu, A. Wierman, and S. Low, “Robustness and consistency in linear quadratic control with untrusted predictions,”ACM SIGMETRICS Performance Evaluation Review, vol. 50, no. 1, pp. 107–108, 2022
work page 2022
-
[24]
G. E. Dullerud and F. Paganini,A course in robust control theory: a convex approach. Springer Science & Business Media, 2013, vol. 36
work page 2013
-
[25]
Improved predictions from measured disturbances in linear model predictive control,
B. J. T. Binder, T. A. Johansen, and L. Imsland, “Improved predictions from measured disturbances in linear model predictive control,”Journal of Process Control, vol. 75, pp. 86–106, 2019
work page 2019
-
[26]
Predicting the future state of disturbed lti systems: A solution based on high-order observers,
A. Castillo and P. Garcia, “Predicting the future state of disturbed lti systems: A solution based on high-order observers,”Automatica, vol. 124, p. 109365, 2021
work page 2021
-
[27]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Advances in neural information processing systems, vol. 30, 2017
work page 2017
-
[28]
B. Amos, L. Xu, and J. Z. Kolter, “Input convex neural networks,” inInternational conference on machine learning. PMLR, 2017, pp. 146–155
work page 2017
-
[29]
Closed-Form Last Layer Optimization
A. Galashov, N. Da Costa, L. Xu, P. Hennig, and A. Gretton, “Closed-form last layer optimization,”arXiv preprint arXiv:2510.04606, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[30]
Towards a theory of model distillation.arXiv preprint arXiv:2403.09053, 2024
E. Boix-Adsera, “Towards a theory of model distillation,”arXiv preprint arXiv:2403.09053, 2024
-
[31]
M. Taheri, S.-J. Chung, and F. Y . Hadaegh, “Closing the loop inside neural networks: Causality-guided layer adaptation for fault recovery control,” 2025. [Online]. Available: https://arxiv.org/abs/2509.16837
-
[32]
The power of predictions in online control,
C. Yu, G. Shi, S.-J. Chung, Y . Yue, and A. Wierman, “The power of predictions in online control,” Advances in Neural Information Processing Systems, vol. 33, pp. 1994–2004, 2020
work page 1994
-
[33]
O. Shamir and T. Zhang, “Stochastic gradient descent for non-smooth optimization: Convergence results and optimal averaging schemes,” inInternational conference on machine learning. PMLR, 2013, pp. 71–79
work page 2013
-
[34]
R. Garrett, “Open Infrastructure Map,” https://openinframap.org, 2024, accessed: 2025-11-25. 13
work page 2024
-
[35]
Disentangling linear quadratic control with untrusted ml predictions,
T. Li, H. Liu, and Y . Yue, “Disentangling linear quadratic control with untrusted ml predictions,”Advances in Neural Information Processing Systems, vol. 37, pp. 86 860–86 898, 2024
work page 2024
-
[36]
Open in-context energy manage- ment platform,
Y . Lu, T. S. Bartels, R. Wu, F. Xia, X. Wang, Y . Wu, H. Yang, and T. Li, “Open in-context energy manage- ment platform,” inProceedings of the 16th ACM International Conference on Future and Sustainable Energy Systems, 2025, pp. 985–986. A Proof of Theorem 4.1 The following lemma characterizes the quadratic cost gap. Lemma 1(Lemma 13 in [22]).For any ψt ...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.