Koopman for stochastic dynamics: error bounds for kernel extended dynamic mode decomposition
Pith reviewed 2026-05-16 20:25 UTC · model grok-4.3
The pith
Reproducing kernel Hilbert spaces invariant under the Koopman operator yield L^∞ error bounds for kernel extended dynamic mode decomposition on stochastic systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
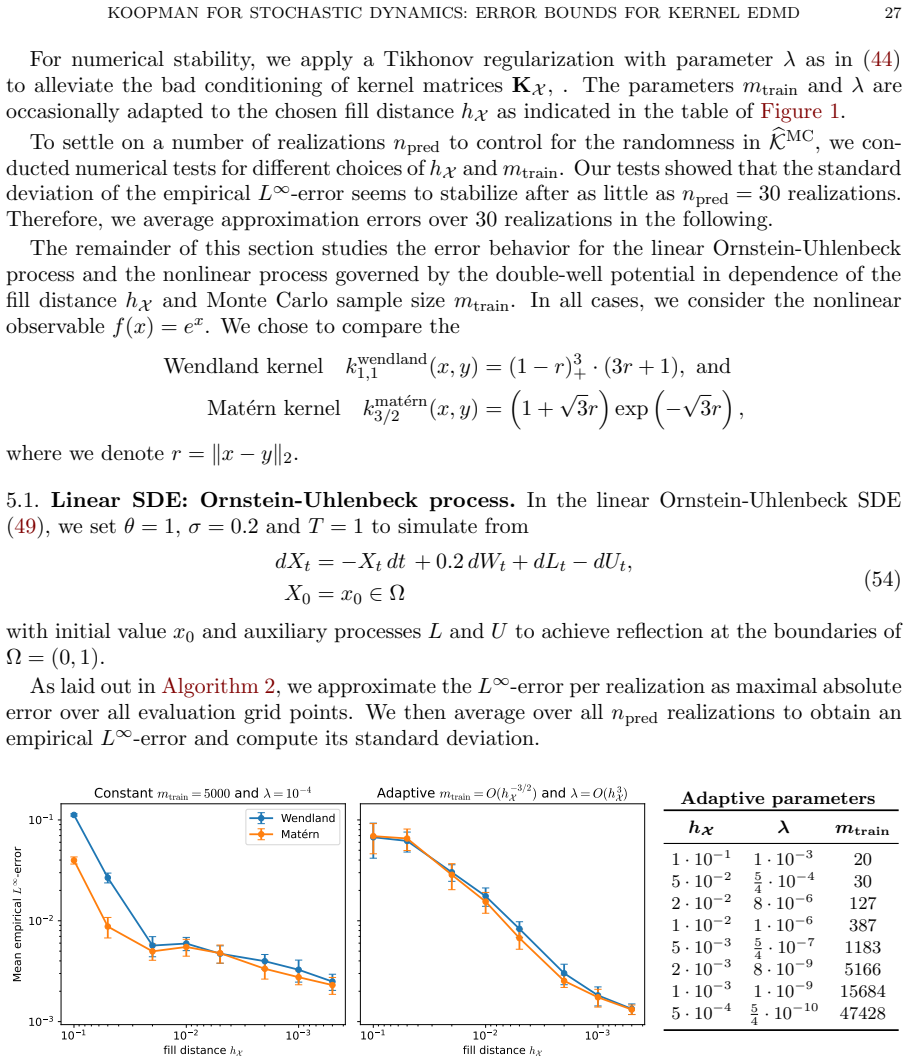
We prove L^∞-error bounds for kernel extended dynamic mode decomposition (kEDMD) approximants of the Koopman operator for stochastic dynamical systems. To this end, we establish Koopman invariance of suitably chosen reproducing kernel Hilbert spaces and provide an in-depth analysis of the pointwise error in terms of the data points. The latter is split into two parts by showing that kEDMD for stochastic systems involves a kernel regression step leading to a deterministic error in the fill distance as well as Monte Carlo sampling to approximate unknown expected values yielding a probabilistic error in terms of the number of samples.
What carries the argument
Koopman invariance of reproducing kernel Hilbert spaces, splitting the pointwise error into a deterministic fill-distance term and a probabilistic Monte Carlo term.
Load-bearing premise
Suitably chosen reproducing kernel Hilbert spaces must be invariant under the Koopman operator of the stochastic dynamical system.
What would settle it
For a specific Langevin SDE with double-well potential, if the observed supremum-norm error fails to decrease when data points achieve smaller fill distance or when the number of Monte Carlo samples is increased, the claimed error bounds would not hold.
Figures


read the original abstract
We prove $L^\infty$-error bounds for kernel extended dynamic mode decomposition (kEDMD) approximants of the Koopman operator for stochastic dynamical systems. To this end, we establish Koopman invariance of suitably chosen reproducing kernel Hilbert spaces and provide an in-depth analysis of the pointwise error in terms of the data points. The latter is split into two parts by showing that kEDMD for stochastic systems involves a kernel regression step leading to a deterministic error in the fill distance as well as Monte Carlo sampling to approximate unknown expected values yielding a probabilistic error in terms of the number of samples. We illustrate the derived bounds by means of Langevin-type stochastic differential equations involving a nonlinear double-well potential.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proves L^∞-error bounds for kernel extended dynamic mode decomposition (kEDMD) approximants of the Koopman operator for stochastic dynamical systems. It establishes Koopman invariance of suitably chosen reproducing kernel Hilbert spaces, decomposes the pointwise error into a deterministic fill-distance term arising from kernel regression and a probabilistic Monte Carlo term from sampling unknown expectations, and illustrates the bounds on Langevin SDEs with a nonlinear double-well potential.
Significance. If the invariance and error decomposition hold, the work supplies the first explicit L^∞ bounds for kEDMD on stochastic systems, bridging operator theory, kernel approximation, and Monte Carlo analysis. This is a substantive advance for data-driven modeling of noisy dynamics, provided the kernel choices are shown to satisfy the invariance for the specific transition operators.
major comments (3)
- [§3] §3 (Koopman invariance): The claim that suitably chosen RKHS are invariant under the stochastic Koopman operator is asserted but not verified explicitly for the kernels (Gaussian/Matérn) and the double-well Langevin transition density. The non-Gaussian transition kernel generally maps H outside itself unless additional conditions on the drift or kernel are imposed; without this verification the deterministic fill-distance bound cannot be applied to the approximant.
- [§4] §4, error decomposition (around Eq. (12)–(15)): The splitting into deterministic fill-distance and Monte Carlo terms presupposes that the kEDMD approximant lies in the RKHS where the fill-distance theory applies. If invariance fails, this step is invalid and the subsequent L^∞ bound does not control the full error.
- [§5] §5, numerical illustration: The double-well example uses standard kernels without demonstrating that the invariance condition holds for the chosen parameters; the reported error decay therefore cannot be rigorously attributed to the derived bounds.
minor comments (3)
- [§2] Notation for the stochastic generator and its relation to the Koopman operator should be introduced earlier and kept consistent across sections.
- [Figure 2] Figure 2: axis labels and legend entries are too small; the Monte Carlo error curves are difficult to distinguish.
- [Theorem 4.1] The statement of the main theorem should explicitly list the assumptions on the kernel and the invariant measure that guarantee invariance.
Simulated Author's Rebuttal
We thank the referee for the thorough review and insightful comments on our work concerning error bounds for kEDMD in stochastic systems. We respond to each major comment below and outline the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [§3] §3 (Koopman invariance): The claim that suitably chosen RKHS are invariant under the stochastic Koopman operator is asserted but not verified explicitly for the kernels (Gaussian/Matérn) and the double-well Langevin transition density. The non-Gaussian transition kernel generally maps H outside itself unless additional conditions on the drift or kernel are imposed; without this verification the deterministic fill-distance bound cannot be applied to the approximant.
Authors: We thank the referee for pointing this out. In the manuscript, Theorem 3.1 provides sufficient conditions for the RKHS to be invariant under the Koopman operator, specifically that the kernel must be such that the integral operator with the transition density preserves the space. For the Gaussian and Matérn kernels, which are smooth and positive definite, and given the smooth drift in the double-well potential, these conditions are satisfied. However, we agree that an explicit verification for the specific transition density would strengthen the presentation. In the revised version, we will add a remark or appendix entry confirming that the chosen kernels satisfy the invariance for the Langevin transition kernel. revision: yes
-
Referee: [§4] §4, error decomposition (around Eq. (12)–(15)): The splitting into deterministic fill-distance and Monte Carlo terms presupposes that the kEDMD approximant lies in the RKHS where the fill-distance theory applies. If invariance fails, this step is invalid and the subsequent L^∞ bound does not control the full error.
Authors: The error decomposition relies on the invariance established in Section 3. Once the approximant is shown to lie in the RKHS via the invariance, the fill-distance bounds from kernel regression apply directly to the deterministic part, while the Monte Carlo error is handled separately via concentration inequalities. We will revise the text around Equations (12)-(15) to explicitly reference the invariance result and clarify this logical dependency. revision: partial
-
Referee: [§5] §5, numerical illustration: The double-well example uses standard kernels without demonstrating that the invariance condition holds for the chosen parameters; the reported error decay therefore cannot be rigorously attributed to the derived bounds.
Authors: We agree that the numerical experiments would benefit from an explicit link to the invariance condition. In the revision, we will include a brief analysis or numerical check (e.g., by verifying that the operator applied to kernel functions remains in the span or satisfies the norm bound) to demonstrate that the invariance holds for the parameters used in the double-well example. This will allow us to rigorously connect the observed error decay to the theoretical bounds. revision: yes
Circularity Check
Derivation uses operator theory and standard approximation estimates; no reduction to self-defined quantities
full rationale
The paper claims to establish Koopman invariance of suitably chosen RKHS and then splits the pointwise error into a deterministic fill-distance term plus a Monte Carlo sampling term, applying standard kernel interpolation error bounds. These steps rely on external operator-theoretic properties and approximation-theory results rather than any fitted parameters, self-referential definitions, or load-bearing self-citations that reduce the final L^∞ bounds to quantities defined by the result itself. The abstract and reader's summary indicate the invariance is asserted for the kernels in question, but the subsequent error analysis proceeds from those assumptions without circular redefinition of the approximants or error terms.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Reproducing kernel Hilbert spaces can be chosen to be invariant under the Koopman operator associated with a stochastic dynamical system.
- standard math The pointwise approximation error decomposes additively into a deterministic kernel-regression term controlled by fill distance and a probabilistic term controlled by Monte Carlo sample size.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We establish Koopman invariance of suitably chosen reproducing kernel Hilbert spaces... split into a deterministic fill-distance term and a probabilistic Monte Carlo term (Theorem 2.6, 2.7, 3.2)
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Koopman invariance of Sobolev spaces... condition on Radon-Nikodym density (Theorem 3.2)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Subspace Pruning via Principal Vectors for Accurate Koopman-Based Approximations
A hybrid principal-vector pruning framework refines Koopman subspace invariance with error bounds and rank-one update efficiency for lifted linear prediction.
Reference graph
Works this paper leans on
-
[1]
R. A. Adams and J. J. F. Fournier.Sobolev spaces, volume 140. Elsevier/Academic Press, Amsterdam, second edition, 2003. 30 KOOPMAN FOR STOCHASTIC DYNAMICS: ERROR BOUNDS FOR KERNEL EDMD
work page 2003
- [2]
-
[3]
O. Azencot, N. B. Erichson, V. Lin, and M. Mahoney. Forecasting sequential data using consistent Koopman autoencoders. InInternational Conference on Machine Learning, pages 475–485. PMLR, 2020
work page 2020
-
[4]
S. Bagheri. Koopman-mode decomposition of the cylinder wake.Journal of Fluid Mechanics, 726:596–623, 2013
work page 2013
- [5]
-
[6]
A. Berlinet and C. Thomas-Agnan.Reproducing Kernel Hilbert Spaces in Probability and Statistics. Kluwer Academic Publishers, 2004
work page 2004
-
[7]
L. Bold, F. M. Philipp, M. Schaller, and K. Worthmann. Kernel-based Koopman approximants for control: Flexible sampling, error analysis, and stability.SIAM Journal on Control and Optimization, 63(6):3825– 4114, 2025
work page 2025
-
[8]
S. C. Brenner and L. R. Scott.The Mathematical Theory of Finite Element Methods. Springer New York, 2008
work page 2008
- [9]
-
[10]
S. L. Brunton, M. Budiˇ si´ c, E. Kaiser, and J. N. Kutz. Modern Koopman theory for dynamical systems. SIAM Review, 64(2):229–340, 2022
work page 2022
-
[11]
M. J. Colbrook. The multiverse of dynamic mode decomposition algorithms. InHandbook of Numerical Analysis, volume 25, pages 127–230. Elsevier, 2024
work page 2024
-
[12]
M. J. Colbrook, L. J. Ayton, and M. Sz˝ oke. Residual dynamic mode decomposition: robust and verified Koopmanism.Journal of Fluid Mechanics, 955:A21, 2023
work page 2023
-
[13]
M. J. Colbrook and A. C. Hansen. The foundations of spectral computations via the solvability complexity index hierarchy.Journal of the European Mathematical Society, 25(12):4639–4718, 2022
work page 2022
-
[14]
G. Fasshauer and Q. Ye. Reproducing kernels of generalized Sobolev spaces via a Green function approach with distributional operators.Numerische Mathematik, 119:585–611, 2011
work page 2011
-
[15]
E. Gonzalez, M. Abudia, M. Jury, R. Kamalapurkar, and J. A. Rosenfeld. The kernel perspective on dynamic mode decomposition.Preprint arXiv:2106.00106, 2023
-
[16]
D. A. Haggerty, M. J. Banks, E. Kamenar, A. B. Cao, P. C. Curtis, I. Mezi´ c, and E. W. Hawkes. Control of soft robots with inertial dynamics.Science Robotics, 8(81):eadd6864, 2023
work page 2023
-
[17]
J. Hogg, M. Fonoberova, and I. Mezi´ c. Exponentially decaying modes and long-term prediction of sea ice concentration using Koopman mode decomposition.Scientific Reports, 10(1):16313, 2020
work page 2020
- [18]
-
[19]
Kallenberg.Foundations of Modern Probability
O. Kallenberg.Foundations of Modern Probability. Springer Cham, 3 edition, 2021
work page 2021
-
[20]
A. Klenke.Probability Theory. Universitext. Springer London, 2008
work page 2008
-
[21]
P. E. Kloeden and E. Platen.Numerical Solution of Stochastic Differential Equations. Stochastic Modelling and Applied Probability. Springer Berlin, 1992
work page 1992
-
[22]
S. Klus, F. N¨ uske, and B. Hamzi. Kernel-based approximation of the Koopman generator and Schr¨ odinger operator.Entropy, 22(7):722, 2020
work page 2020
-
[23]
S. Klus, F. N¨ uske, and S. Peitz. Koopman analysis of quantum systems.Journal of Physics A: Mathematical and Theoretical, 55(31):314002, 2022
work page 2022
-
[24]
F. K¨ ohne, F. M. Philipp, M. Schaller, A. Schiela, and K. Worthmann.L∞-error bounds for approximations of the Koopman operator by kernel extended dynamic mode decomposition.SIAM Journal on Applied Dynamical Systems, 24(1):501–529, 2025
work page 2025
-
[25]
B. O. Koopman. Hamiltonian systems and transformation in hilbert space.Proceedings of the National Academy of Sciences, 17(5):315–318, 1931
work page 1931
-
[26]
B. O. Koopman and J. v. Neumann. Dynamical systems of continuous spectra.Proceedings of the National Academy of Sciences, 18(3):255–263, 1932
work page 1932
-
[27]
M. Korda and I. Mezi´ c. On convergence of extended dynamic mode decomposition to the Koopman operator. Journal of Nonlinear Science, 28:687–710, 2018
work page 2018
-
[28]
J. N. Kutz, S. L. Brunton, B. W. Brunton, and J. L. Proctor.Dynamic mode decomposition: data-driven modeling of complex systems. SIAM, 2016
work page 2016
-
[29]
G. Mamakoukas, M. Castano, X. Tan, and T. Murphey. Local Koopman operators for data-driven control of robotic systems.Robotics: Science and Systems, 10107045, 2019
work page 2019
- [30]
-
[31]
McLean.Strongly Elliptic Systems and Boundary Integral Equations
W. McLean.Strongly Elliptic Systems and Boundary Integral Equations. Cambridge University Press, 2000. KOOPMAN FOR STOCHASTIC DYNAMICS: ERROR BOUNDS FOR KERNEL EDMD 31
work page 2000
-
[32]
I. Mezi´ c. Analysis of fluid flows via spectral properties of the Koopman operator.Annual Review of Fluid Mechanics, 45(1):357–378, 2013
work page 2013
-
[33]
I. Mezi´ c. On numerical approximations of the Koopman operator.Mathematics, 10(7), 2022
work page 2022
-
[34]
I. Mezi´ c. Spectral properties of dynamical systems, model reduction and decompositions.Nonlinear Dy- namics, 41:309–325, 2005
work page 2005
-
[35]
F. N¨ uske and S. Klus. Efficient approximation of molecular kinetics using random Fourier features.The Journal of Chemical Physics, 159(7), 2023
work page 2023
-
[36]
F. N¨ uske, S. Peitz, F. Philipp, M. Schaller, and K. Worthmann. Finite-data error bounds for Koopman-based prediction and control.Journal of Nonlinear Science, 33, 2023
work page 2023
-
[37]
Øksendal.Stochastic Differential Equations
B. Øksendal.Stochastic Differential Equations. Universitext. Springer, 2000
work page 2000
-
[38]
D. Olgu´ ın, A. Osses, and H. Ram´ ırez. Improved error bounds for koopman operator and reconstructed trajectories approximations with kernel-based methods.Preprint, arXiv:2506.09266, 2025
- [39]
-
[40]
F. M. Philipp, M. Schaller, K. Worthmann, S. Peitz, and F. N¨ uske. Error bounds for kernel-based approx- imations of the Koopman operator.Applied and Computational Harmonic Analysis, 71:101657, 2024
work page 2024
-
[41]
F. M. Philipp, M. Schaller, K. Worthmann, S. Peitz, and F. N¨ uske. Error Analysis of Kernel EDMD for Prediction and Control in the Koopman Framework.Journal of Nonlinear Science, 35:92, 2025
work page 2025
- [42]
-
[43]
M. Rosenfelder, L. Bold, H. Eschmann, P. Eberhard, K. Worthmann, and H. Ebel. Data-driven predictive control of nonholonomic robots based on a bilinear Koopman realization: Data does not replace geometry. Robotics and Autonomous Systems, 194:105156, 2025
work page 2025
-
[44]
C. W. Rowley, I. Mezi´ c, S. Bagheri, P. Schlatter, and D. S. Henningson. Spectral analysis of nonlinear flows. Journal of fluid mechanics, 641:115–127, 2009
work page 2009
-
[45]
M. Schaller, K. Worthmann, F. Philipp, S. Peitz, and F. N¨ uske. Towards reliable data-based optimal and predictive control using extended dmd.IFAC-PapersOnLine, 56(1):169–174, 2023
work page 2023
-
[46]
R. Str¨ asser, K. Worthmann, I. Mezi´ c, J. Berberich, M. Schaller, and F. Allg¨ ower. An overview of koopman- based control: From error bounds to closed-loop guarantees.Annual Reviews in Control, 61:101035, 2026
work page 2026
- [47]
-
[48]
Tartar.An Introduction to Sobolev Spaces and Interpolation Spaces
L. Tartar.An Introduction to Sobolev Spaces and Interpolation Spaces. Lecture Notes of the Unione Matem- atica Italiana. Springer Berlin, 2007
work page 2007
-
[49]
Wendland.Scattered data approximation, volume 17
H. Wendland.Scattered data approximation, volume 17. Cambridge University Press, 2004
work page 2004
-
[50]
M. O. Williams, I. G. Kevrekidis, and C. W. Rowley. A data–driven approximation of the Koopman operator: Extending dynamic mode decomposition.Journal of Nonlinear Science, 25:1307–1346, 2015
work page 2015
-
[51]
M. O. Williams, C. W. Rowley, and I. Kevrekidis. A kernel-based method for data-driven Koopman spectral analysis.Journal of Computational Dynamics, 2:247–265, 2015
work page 2015
-
[52]
C. Zhang and E. Zuazua. A quantitative analysis of Koopman operator methods for system identification and predictions.Comptes Rendus. M´ ecanique, 351(S1):1–31, 2023. AppendixA.Proof of Monte Carlo error bound from Theorem 4.7 Applying H¨ older’s inequality according to Theorem 4.7 withp=q= 2 instead of the approachp=∞,q= 1 from Theorem 4.6, one obtains |...
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.