A Myhill-Nerode Characterization and Active Learning for One-Clock Timed Automata
Pith reviewed 2026-05-16 11:53 UTC · model grok-4.3
The pith
A Myhill-Nerode characterization for one-clock deterministic timed automata accounts for varying clock resets along the same word.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We present a Myhill-Nerode style characterization for languages recognized by one-clock deterministic timed automata (1-DTA). Although there is only one clock, distinct automata may reset it differently along the same word. This adds a significant challenge in the search for a canonical automaton. Our characterization is based on a new perspective of 1-DTAs in terms of 'half-integral' words that they accept, along with the reset information encoded by them. We apply our results to develop L* style algorithms that learn the canonical 1-DTA.
What carries the argument
The Myhill-Nerode equivalence on half-integral words augmented with reset information, which induces a finite-index congruence whose classes are the states of the canonical 1-DTA.
If this is right
- The equivalence classes of the new relation are exactly the states of the unique minimal 1-DTA for any given language.
- An L* learner can be instantiated directly on the half-integral-word congruence to recover the canonical automaton from membership and equivalence queries.
- Any language whose minimal 1-DTA exists must have finite index under this reset-augmented relation.
- The learning algorithm terminates and returns the smallest deterministic one-clock automaton consistent with the observed timed words.
Where Pith is reading between the lines
- The half-integral perspective may simplify the design of verification algorithms that must track only one clock and its resets.
- Active-learning techniques developed here could be lifted to infer timing models of embedded controllers whose specifications are given by one-clock constraints.
- If a similar finite encoding of multiple reset sequences can be found, the same approach might extend the Myhill-Nerode result to deterministic timed automata with two clocks.
Load-bearing premise
Reset information along words can be encoded into a finite equivalence relation that yields a canonical deterministic one-clock automaton despite the possibility of different reset points on the same word.
What would settle it
A language accepted by some 1-DTA for which the proposed equivalence relation on half-integral words with resets produces infinitely many classes would falsify the characterization.
Figures



read the original abstract
We present a Myhill-Nerode style characterization for languages recognized by one-clock deterministic timed automata (1-DTA). Although there is only one clock, distinct automata may reset it differently along the same word. This adds a significant challenge in the search for a canonical automaton. Our characterization is based on a new perspective of 1-DTAs in terms of "half-integral" words that they accept, along with the reset information encoded by them. We apply our results to develop L* style algorithms that learn the canonical 1-DTA.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a Myhill-Nerode style characterization for languages recognized by one-clock deterministic timed automata (1-DTA). It introduces a perspective based on 'half-integral' words together with encoded reset information to handle the fact that distinct 1-DTAs may reset their single clock at different points along the same word. The characterization is then used to construct L*-style active learning algorithms that identify the canonical 1-DTA for a given language.
Significance. If the finiteness and canonicity arguments hold, the result supplies a missing theoretical foundation for active learning of one-clock timed automata, a model class widely used in real-time verification. The explicit handling of variable reset points via half-integral words is a technical contribution that could enable practical inference tools for timed systems.
major comments (2)
- [§3] §3, Definition 3.4 and Theorem 3.7: the equivalence relation on half-integral words is claimed to be finite and to yield a canonical deterministic one-clock automaton, yet the argument that reset information can always be collapsed into finitely many classes (independent of the particular automaton) is only sketched; a concrete bound on the number of classes in terms of the number of states or the maximal constant appearing in the guards is missing.
- [§5.2] §5.2, Algorithm 1 (L* learner): the termination and correctness proof relies on the Myhill-Nerode relation being of finite index, but no explicit argument shows that the observation table construction respects the half-integral word partitioning when the target automaton uses non-integral reset points; this step is load-bearing for the claim that the learned automaton is canonical.
minor comments (2)
- [§3] Notation for half-integral words (e.g., the distinction between integral and half-integral suffixes) is introduced without a running example; adding a small concrete 1-DTA and its accepted half-integral words would improve readability.
- [Introduction] The abstract and introduction both state that the characterization is 'parameter-free,' but the definition of the equivalence classes implicitly depends on the finite set of constants appearing in the target automaton; this should be clarified.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. The comments identify places where the proofs can be made more explicit. We address each point below and will revise the manuscript to strengthen the arguments while preserving the original technical development.
read point-by-point responses
-
Referee: [§3] §3, Definition 3.4 and Theorem 3.7: the equivalence relation on half-integral words is claimed to be finite and to yield a canonical deterministic one-clock automaton, yet the argument that reset information can always be collapsed into finitely many classes (independent of the particular automaton) is only sketched; a concrete bound on the number of classes in terms of the number of states or the maximal constant appearing in the guards is missing.
Authors: We agree that the finiteness argument in the proof of Theorem 3.7 would benefit from an explicit bound. The equivalence classes correspond exactly to the states of the canonical 1-DTA; because any 1-DTA language has a finite minimal automaton, the index is finite independently of any particular automaton. To make this concrete we will add a supporting lemma stating that, for a language recognized by a 1-DTA whose guards use constants at most C, the number of equivalence classes is bounded by O(n·(2C+1)), where n is the number of states of the minimal automaton. The revised proof of Theorem 3.7 will include this bound together with a detailed argument showing how reset information is collapsed into these classes. revision: yes
-
Referee: [§5.2] §5.2, Algorithm 1 (L* learner): the termination and correctness proof relies on the Myhill-Nerode relation being of finite index, but no explicit argument shows that the observation table construction respects the half-integral word partitioning when the target automaton uses non-integral reset points; this step is load-bearing for the claim that the learned automaton is canonical.
Authors: The observation-table construction in Algorithm 1 is designed to query precisely the half-integral words that appear in the Myhill-Nerode relation of Section 3, thereby inheriting its finite index. Nevertheless, we acknowledge that the interaction between non-integral reset points and table consistency is not spelled out. We will insert a new lemma (Lemma 5.3) proving that any two half-integral words placed in the same row of the table produce identical future observations, even when the underlying automaton resets at non-integral times. The termination and canonicity arguments in Section 5.2 will then cite this lemma directly. revision: yes
Circularity Check
Myhill-Nerode characterization for 1-DTAs is derived independently from structural properties
full rationale
The paper defines a Myhill-Nerode equivalence on half-integral words augmented with reset information directly from the acceptance behavior of 1-DTAs. This construction yields a finite index relation that produces the canonical automaton without reducing any central claim to a fitted parameter, a self-citation chain, or a redefinition of the target language. The L* learner follows from the same equivalence classes, remaining self-contained against external benchmarks for timed regular languages.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Deterministic one-clock timed automata are defined in the standard way with a single clock that can be reset on transitions.
invented entities (1)
-
half-integral words
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat recovery and embed_strictMono unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our characterization is based on a new perspective of 1-DTAs in terms of 'half-integral' words ... along with the reset information encoded by them (Theorem 7, syntactic reset function R_L).
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
A profile (R,≈) is monotonic, L-preserving and has finite index (Def. 9, Prop. 10).
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Alur, R., Dill, D.L.: A theory of timed automata. Theoretical Computer Science 126(2), 183–235 (1994).https://doi.org/10.1016/0304-3975(94)90010-8
-
[2]
Alur, R., Fix, L., Henzinger, T.A.: Event-clock automata: A determinizable class of timed automata. Theor. Comput. Sci.211(1-2), 253–273 (1999).https://doi. org/10.1016/S0304-3975(97)00173-4
-
[3]
An, J., Chen, M., Zhan, B., Zhan, N., Zhang, M.: Learning one-clock timed au- tomata. In: Tools and Algorithms for the Construction and Analysis of Systems - 26th International Conference, TACAS 2020, Held as Part of the European Joint Conferences on Theory and Practice of Software, ETAPS 2020, Proceedings, Part I. Lecture Notes in Computer Science, vol. ...
-
[4]
An, J., Wang, L., Zhan, B., Zhan, N., Zhang, M.: Learning real-time automata. Sci. China Inf. Sci.64(9) (2021).https://doi.org/10.1007/S11432-019-2767-4
-
[5]
ACM Transactions on Embedded Computing Systems20(5s), 1–26 (2021)
An, J., Zhan, B., Zhan, N., Zhang, M.: Learning Nondeterministic Real-Time Au- tomata. ACM Transactions on Embedded Computing Systems20(5s), 1–26 (2021). https://doi.org/10.1145/3477030
-
[6]
Angluin, D.: Learning regular sets from queries and counterexamples. Inf. Comput. 75(2), 87–106 (1987).https://doi.org/10.1016/0890-5401(87)90052-6
-
[7]
Behrmann, G., David, A., Larsen, K.G.: A tutorial on uppaal. In: Formal Methods for the Design of Real-Time Systems, International School on For- mal Methods for the Design of Computer, Communication and Software Sys- tems, SFM-RT 2004, Revised Lectures. Lecture Notes in Computer Science, vol. 3185, pp. 200–236. Springer, Bertinoro, Italy (2004).https://d...
work page 2004
-
[8]
Bhave, D., Guha, S.: Adding Dense-Timed Stack to Integer Reset Timed Au- tomata. In: RP’17: Proc. 11th International Conference on Reachability Prob- lems. LNCS, vol. 10506, pp. 9–25. Springer, London, United Kingdom (2017). https://doi.org/10.1007/978-3-319-67089-8_2
-
[9]
Bruy` ere, V., Garhewal, B., P´ erez, G.A., Staquet, G., Vaandrager, F.W.: Active learning of mealy machines with timers. CoRRabs/2403.02019(2024).https: //doi.org/10.48550/ARXIV.2403.02019 1-DTA: Myhill-Nerode characterization and active learning 19
-
[10]
In 32nd European Conference on Object-Oriented Programming (ECOOP 2018)
Doveri, K., Ganty, P., Srivathsan, B.: A myhill-nerode style characterization for timed automata with integer resets. In: 44th IARCS Annual Conference on Founda- tions of Software Technology and Theoretical Computer Science, FSTTCS 2024. LIPIcs, vol. 323, pp. 21:1–21:18. Schloss Dagstuhl - Leibniz-Zentrum f¨ ur Infor- matik, Gandhinagar, Gujarat, India (2...
-
[11]
Theoretical Computer Science411(47), 4029–4054 (2010).https://doi.org/10
Grinchtein, O., Jonsson, B., Leucker, M.: Learning of event-recording automata. Theoretical Computer Science411(47), 4029–4054 (2010).https://doi.org/10. 1016/j.tcs.2010.07.008
work page 2010
-
[12]
Maler, O., Pnueli, A.: On Recognizable Timed Languages. In: FoSSaCS’04: Proc. of the Int. Conf. on Foundations of Software Science and Computation Structures. LNCS, vol. 2987, pp. 348–362. Springer, Barcelona, Spain (2004).https://doi. org/10.1007/978-3-540-24727-2_25
-
[13]
Ouaknine, J., Worrell, J.: On the language inclusion problem for timed automata: Closing a decidability gap. In: LICS’04: Proc. of the 19th Annual IEEE Symposium on Logic in Computer Science. pp. 54–63. IEEE, Turku, Finland (2004).https: //doi.org/10.1109/LICS.2004.1319600
-
[14]
Suman, P.V., Pandya, P.K., Krishna, S.N., Manasa, L.: Timed Automata with In- teger Resets: Language Inclusion and Expressiveness. In: FORMATS’08: Proc. of the Int. Conf. on Formal Modeling and Analysis of Timed Systems. vol. 5215, pp. 78–92. Springer, Saint-Malo, France (2008).https://doi.org/10.1007/ 978-3-540-85778-5_7
work page 2008
-
[15]
Vaandrager, F.W., Ebrahimi, M., Bloem, R.: Learning mealy machines with one timer. Inf. Comput.295(Part A), 105013 (2023).https://doi.org/10.1016/J. IC.2023.105013
work page doi:10.1016/j 2023
-
[16]
Waga, M.: Active Learning of Deterministic Timed Automata with Myhill-Nerode Style Characterization. In: CAV’23: Proc. of the 35th Int. Conf. on Computer Aided Verification. LNCS, vol. 13964, pp. 3–26. Springer, Paris, France (2023). https://doi.org/10.1007/978-3-031-37706-8_1
-
[17]
In: Bouajjani, A., Hol´ ık, L., Wu, Z
Xu, R., An, J., Zhan, B.: Active learning of one-clock timed automata using con- straint solving. In: Bouajjani, A., Hol´ ık, L., Wu, Z. (eds.) Automated Technol- ogy for Verification and Analysis - 20th International Symposium, ATVA 2022, Virtual Event, October 25-28, 2022, Proceedings. Lecture Notes in Computer Science, vol. 13505, pp. 249–265. Springer...
-
[18]
ifr= 0, then add (p i, q0, a, ϕ, r) for all copiesp i,
-
[19]
else, from all copiesp i ofp, add an outgoing transition (p i, qJϕK, a, ϕ, r). ⊓ ⊔ Proposition (10).For an acceptorA, the profile(R A,≈ A)is monotonic, L(A)-preserving and has finite index. Proof.Finite-index of≈ A comes from finiteness of the set of states. ForKthe maximum constant ofAC(K) holds, thusK (RA,≈A) ≤Kis finite. Therefore, (RA,≈ A) has finite ...
-
[20]
Replace every large stateqby a new state q
-
[21]
Replace every transition (p, q, a, K < x,1)∈Twherepis small andqis large, by a transition (p, q, a, K < x,0)
-
[22]
Replace every transition (s, s ′, a, K < x,1)∈Twheresands ′ are large by a transition ( s, s′, a,0≤x,0)
-
[23]
Replace every resetting transition (q, p, a, K < x,0)∈Twhereqis large by a transition ( q, p, a,0≤x,0). We define the initial state ofBto beq I and its accepting states to be all the statespand psuch thatp∈F. This modification removes all transitions of the form (p, q, a, K < x,1) and only adds resetting transitions with target states of region{0}. Thus,B...
-
[24]
Replace every critical stateqby a new state qand remove all the transitions associated toq
-
[25]
For every stateps.t.region(p) = (i, i+ 1) form≤iadd a copy p
-
[26]
For every transition (p, q, a, x=m,1)∈Twherepis good andqis critical add a transition (p, q, a, x=m,0)
-
[27]
For every transition (s, s ′, a, x=m,1)∈Twheresands ′ are critical add a transition (s, s′, a, x= 0,0)
-
[28]
For every transition (s, s ′, a, ϕ,1)∈Ts.t.region(s)∈ {[m] ≡K } ∪ {[(i, i+ 1)]≡K |m≤i}andJϕK= (c, c+ 1) for somem≤cadd a transition (s, s′, a, c−m < x < c−m+ 1,1)
-
[29]
For every transition (s, s ′, a, ϕ,0)∈Ts.t.region(s)∈ {[m] ≡K } ∪ {[(i, i+ 1)]≡K |m≤i}add a transition ( s, s′, a,modify(ϕ),0) where, modify(ϕ) = c−m < x < c−m+ 1 ifϕisc < x < c+ 1 K−c < xifϕisK < x x=c−melse (ϕisx=c). Finally, we define the initial state ofBto beq I and its accepting states to be all the statespand psuch thatp∈F. We introduced no...
-
[30]
Consider the order between{t 1}and 1− {x}: if{t 1}= 1− {x}, then set{t ′ 1}= 1− {x ′}; if{t 1}<1− {x}, choose 1-DTA: Myhill-Nerode characterization and active learning 25 a value for{t ′ 1}between 0 and 1− {x ′}; else choose a value in the interval (1− {x ′},1). Fort 2, we consider two numbers 1− {x+t 1}and 1− {t 1}and compare the relation of{t 2}with the...
-
[31]
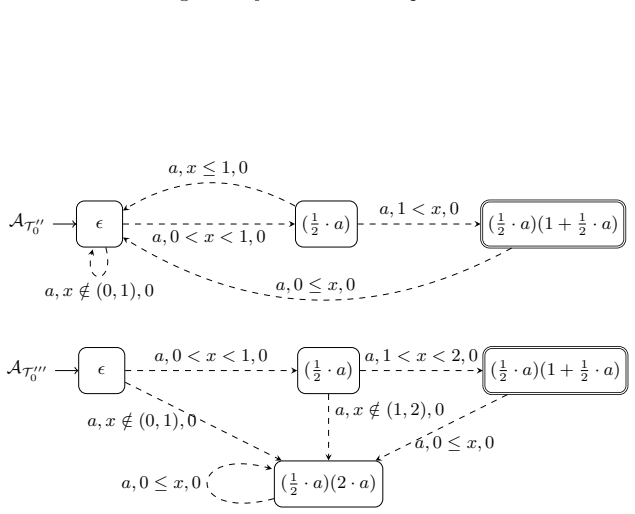
In particular, sinceA (RL,≈L) is a strict acceptor (henceR L(1·a) = 0) it has at least six states
Thus,u andvcannot be sent to the same state. In particular, sinceA (RL,≈L) is a strict acceptor (henceR L(1·a) = 0) it has at least six states. The top automaton in Fig. 1 acceptsLwith five states (including the sink). Therefore,A (RL,≈L) is not minimal. Fig. 2 shows two minimal acceptors for the same language with different reset functions. Even when the...
-
[32]
= 0 and,d 1 = 1 otherwise. Similarly, there is (t 2 ·a)∈Σ K such that:row(s 2(t2 ·a)) =row(s ′ 2),g=ϕ K(r(s 2) +t 2) andd 2 = 0 ifr(s ′
-
[33]
Sinceϕ K(r(s 1)+t1) =ϕ K(r(s 2)+t2) we haves1+t1 ≡K s2+t2
= 0 and, d2 = 1 otherwise. Sinceϕ K(r(s 1)+t1) =ϕ K(r(s 2)+t2) we haves1+t1 ≡K s2+t2. Ifs 1 +t 1 ≤Kthenr(s 1) +t 1 ≡K r(s 2) +t 2 impliesr(s 1) +t 1 =r(s 2) +t 2 since each boundedK-region contains exactly one half-integral value. Since r(s 1) =r(s 2) we thus deducet 1 =t 2. Then by consistency (a) we deduce row(s1(t1 ·a)) =row(s 2(t2 ·a)), thusrow(s ′
-
[34]
=row(s ′ 2). Ifs 1 +t 1 > Kthen by consistency (b)row(s 1(t1 ·a)) =row(s 1(K+ 1 2 ·a)) and similarlyrow(s 2(t2 ·a)) = row(s2(K+ 1 2 ·a)). By consistency (a)row(s 1(K+ 1 2 ·a)) =row(s 2(K+ 1 2 ·a)). Hence,row(s 1(t1 ·a)) =row(s 2(t2 ·a)), thusrow(s ′
-
[35]
=row(s ′ 2). Since the re- set informationd 1 only depends on [r(s ′ 1)]≡K and similarlyd 2 only depends on [r(s′ 2)]≡K,row(s ′
-
[36]
Since for every staterow(s) we haveregion(row(s)) = [r(s)] ≡K,A T is easily seen to be an acceptor
impliesd 1 =d 2. Since for every staterow(s) we haveregion(row(s)) = [r(s)] ≡K,A T is easily seen to be an acceptor. Finally, sinceTis valid,R AT :R ≥0 →[0, K]\N >0. The last part of the proposition is proven by an easy induction on the length of words inS. G Smart Teacher Algorithm – Additional Material Lemma 36.The next closed, consistent, valid OT obta...
-
[37]
(0,0) ( 1 2 ·a)(1 + 1 2 ·a) (1,0) (0,0) (0·a) (0,0) (0,0) (0·a)( 1 2 ·a) (0,0) (0,0) (0·a)( 1 2 ·a)(1 + 1 2 ·a) (0,0) (0,0) ⋆ (0,0) (0,0) Algorithm 2:Learning a strict acceptor with a Smart Teacher Output:A strictK L-acceptorA T such thatL(A T ) =L 1(K, S, E)←(0,{ϵ},{ϵ}); 2whiletruedo 3T ←(K, S, E, T);// buildTfromS,EandK 4ifTis not closed or not consiste...
-
[38]
Therefore, we add|Σ K||E|new cells and for each one them we need to chose whether we reset or not
After an application of action 1 we add|Σ K|new extensions and each one of them is a|E|-dimensional vector. Therefore, we add|Σ K||E|new cells and for each one them we need to chose whether we reset or not. Thus, the width of the branching is at most 2 |ΣK ||E|
-
[39]
For every s∈S∪SΣ K we need to assign a value toT(s,(t·a)e)(2)
After an application of action 2 we add a new column (t·a)e. For every s∈S∪SΣ K we need to assign a value toT(s,(t·a)e)(2). Since for every s∈S, we should haveT(s,(t·a)e) =T(s(t·a), e), choice only happens for s∈SΣ K. Hence, the width of the branching is at most 2 |S||ΣK |
-
[40]
Thus, the width of the branching is at most 2 2|S||E|
After increasing the constant (action 3 or 4) we add 2|S|new extensions. Thus, the width of the branching is at most 2 2|S||E|
-
[41]
After processing a counterexample we add at mostm2 m(1 +|Σ K|) toS∪ SΣK. Hence, the width of the branching is at most 2 m2m(1+|ΣK |)|E|. Hence, the branching degree of the tree isO(2H 2m2m|Σ|). Finally, we find that the total number of membership queries in an execution isO(2 H 3m2m|Σ|H 3m2m|Σ|) and the number of processed OTs isO(2 H 3m2m|Σ|H).⊓ ⊔ 1-DTA:...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.