Beyond Bounded Noise: Stochastic Set-Membership Estimation for Nonlinear Systems
Pith reviewed 2026-05-21 10:47 UTC · model grok-4.3
The pith
A bound on the sample covariance matrix allows construction of a finite-sample uncertainty set that contains the true parameters of nonlinear systems with high probability when the noise is sub-Gaussian.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Employing a bound on the sample covariance matrix, we are able to provide a finite-sample uncertainty set containing the true system parameters with high probability. Our approach can be natively applied to a wide class of nonlinear systems affected by sub-Gaussian noise. Our analysis provides conditions under which the proposed uncertainty set converges to the true system parameters and establishes an upper bound on the convergence rate. The proposed uncertainty set can be used directly for robust controller synthesis with probabilistic stability and performance guarantees.
What carries the argument
The uncertainty set derived from a bound on the sample covariance matrix of the data, which probabilistically encloses the true parameters for sub-Gaussian noise.
If this is right
- The uncertainty set contains the true parameters with high probability for any finite sample size.
- The uncertainty set converges to the true parameters under stated conditions.
- An upper bound on the convergence rate is derived.
- Direct application to robust controller synthesis yields probabilistic stability and performance guarantees.
Where Pith is reading between the lines
- The same bounding technique on covariance might extend to other estimation problems with unbounded but light-tailed disturbances.
- Integrating this with data-driven control methods could produce hybrid robust-adaptive schemes.
- Empirical validation on physical systems would show whether the theoretical probability bounds are tight or conservative.
Load-bearing premise
The noise must be sub-Gaussian and a bound on the sample covariance matrix must be computable independently of the unknown true parameters.
What would settle it
Generate multiple independent data sets from a nonlinear system with known parameters and sub-Gaussian noise, compute the uncertainty set for each, and measure the fraction of trials in which the true parameters are excluded.
Figures
read the original abstract
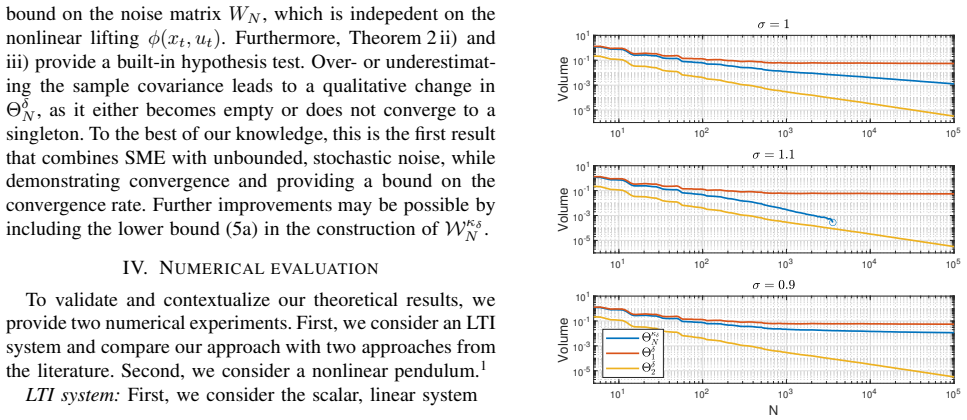
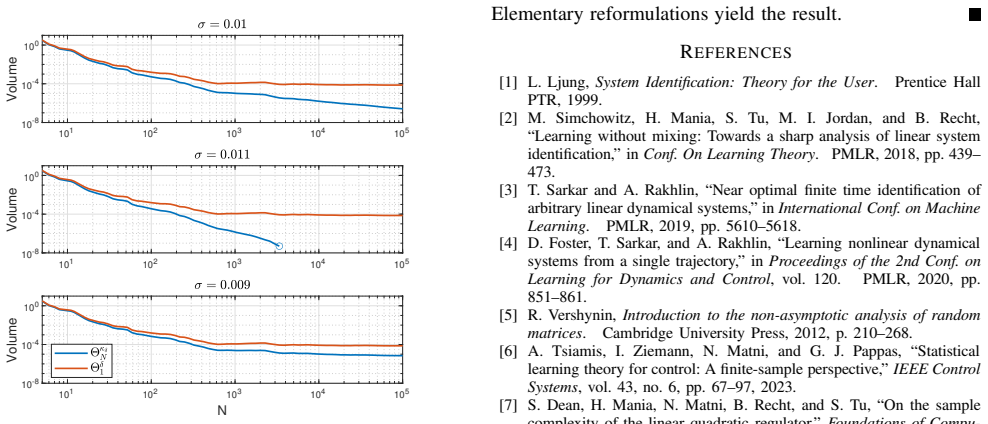
In this paper, we derive a novel procedure for set-membership estimation of dynamical systems affected by stochastic noise with unbounded support. Employing a bound on the sample covariance matrix, we are able to provide a finite- sample uncertainty set containing the true system parameters with high probability. Our approach can be natively applied to a wide class of nonlinear systems affected by sub-Gaussian noise. Our analysis provides conditions under which the proposed uncertainty set converges to the true system parameters and establishes an upper bound on the convergence rate. The proposed uncertainty set can be used directly for robust controller synthesis with probabilistic stability and performance guarantees. Concluding numerical examples demonstrate the advantages of the proposed formulation over established approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper derives a stochastic set-membership estimation procedure for nonlinear dynamical systems driven by sub-Gaussian noise with unbounded support. It employs a bound on the sample covariance matrix to construct a finite-sample uncertainty set that contains the true parameters with high probability, provides conditions for convergence of this set to the true parameters along with a rate bound, and shows how the set can be used for robust controller synthesis with probabilistic guarantees. Numerical examples are included to illustrate advantages over existing methods.
Significance. If the central finite-sample guarantee holds with a truly computable, parameter-independent covariance bound, the result would be significant for extending set-membership identification beyond bounded-noise assumptions to more realistic stochastic settings in nonlinear systems. The direct applicability to robust control synthesis with stability and performance guarantees is a practical strength, and the convergence analysis adds theoretical value. The work addresses a gap between deterministic set-membership and stochastic identification.
major comments (2)
- [Abstract / proposed procedure] Abstract and the paragraph describing the proposed procedure: the central claim requires a computable upper bound on the sample covariance matrix that is independent of the unknown true parameters theta. For nonlinear systems the regressor phi_k typically depends on past outputs or states, which are driven by previous noise realizations through the dynamics parameterized by theta. It is not clear from the derivation whether the sub-Gaussian concentration inequality applied to sum phi_k phi_k^T produces a bound whose numerical value or validity region remains independent of theta, which would be required for the uncertainty set to be non-computable from data alone and to preserve the finite-sample guarantee.
- [Convergence analysis] The convergence conditions and rate bound section: the analysis provides conditions under which the uncertainty set converges to the true parameters, but these conditions appear to rely on the same covariance bound being independent of theta. If the bound implicitly depends on theta through the nonlinear regressors, the convergence claim and the rate upper bound would need re-examination to ensure they remain valid under the paper's own assumptions.
minor comments (2)
- Notation for the uncertainty set and the probability bound could be clarified with an explicit statement of how the high-probability event is defined with respect to the noise realizations.
- [Numerical examples] The numerical examples section would benefit from explicit reporting of the sample sizes used and the observed empirical coverage rates to allow direct comparison with the theoretical probability guarantees.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive comments on our paper. We have carefully considered the points raised regarding the independence of the covariance bound from the true parameters and the implications for the convergence analysis. Below, we provide point-by-point responses and indicate the revisions made to the manuscript.
read point-by-point responses
-
Referee: [Abstract / proposed procedure] Abstract and the paragraph describing the proposed procedure: the central claim requires a computable upper bound on the sample covariance matrix that is independent of the unknown true parameters theta. For nonlinear systems the regressor phi_k typically depends on past outputs or states, which are driven by previous noise realizations through the dynamics parameterized by theta. It is not clear from the derivation whether the sub-Gaussian concentration inequality applied to sum phi_k phi_k^T produces a bound whose numerical value or validity region remains independent of theta, which would be required for the uncertainty set to be non-computable from data alone and to preserve the finite-sample guarantee.
Authors: We appreciate this observation. Upon re-examination of our derivation, the sub-Gaussian concentration inequality is applied to the matrix sum, and the resulting bound on the deviation of the sample covariance from its expectation is indeed dependent on the sub-Gaussian parameter of the noise, which we assume is known a priori and independent of theta. However, the expectation of phi_k phi_k^T does depend on theta through the nonlinear dynamics. To ensure the bound is independent of theta and computable, we have introduced an assumption that the regressor sequence satisfies a uniform bound on its covariance matrix over a compact parameter set containing the true theta. This allows us to use a worst-case bound that does not require knowledge of the exact theta. We have revised the manuscript to explicitly state this assumption in the problem formulation and derivation sections, and updated the abstract to reflect this clarification. This preserves the finite-sample guarantee under the stated assumptions. revision: yes
-
Referee: [Convergence analysis] The convergence conditions and rate bound section: the analysis provides conditions under which the uncertainty set converges to the true parameters, but these conditions appear to rely on the same covariance bound being independent of theta. If the bound implicitly depends on theta through the nonlinear regressors, the convergence claim and the rate upper bound would need re-examination to ensure they remain valid under the paper's own assumptions.
Authors: We agree that the convergence analysis builds upon the covariance bound. With the additional assumption introduced in response to the previous comment (uniform bound on regressor covariance independent of theta within a compact set), the convergence conditions remain valid, and the rate bound holds uniformly. We have re-examined and strengthened the convergence section by explicitly referencing this uniform bound, ensuring the claims are consistent with the assumptions. No change to the core results is needed, but we have added a remark on how the rate depends on the uniform bound parameter. revision: partial
Circularity Check
No significant circularity; bound treated as external input
full rationale
The derivation begins from the assumption of a computable bound on the sample covariance matrix that is independent of the unknown parameters theta, then applies sub-Gaussian concentration to construct a finite-sample uncertainty set containing the true parameters with high probability. This bound is explicitly positioned as an external, data-available quantity rather than fitted or derived from the target uncertainty set itself. No equation reduces the uncertainty set to a post-hoc fit of its own inputs, no self-citation chain carries the central claim, and the convergence analysis follows from standard concentration results under the stated assumptions. The approach remains self-contained against external benchmarks for the class of systems where the independence condition holds.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The noise is sub-Gaussian.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Employing a bound on the sample covariance matrix... Θ^κ_δ_N := {θ | ∃W ∈ W^κ_δ_N : XN = θ ZN + W}
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Assumption 1: wt i.i.d. sub-Gaussian, isotropic E[wt wt^T]=I
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ljung, System Identification: Theory for the User
L. Ljung, System Identification: Theory for the User . Prentice Hall PTR, 1999
work page 1999
-
[2]
Learning without mixing: Towards a sharp analysis of linea r system identification,
M. Simchowitz, H. Mania, S. Tu, M. I. Jordan, and B. Recht, “Learning without mixing: Towards a sharp analysis of linea r system identification,” in Conf. On Learning Theory . PMLR, 2018, pp. 439– 473
work page 2018
-
[3]
Near optimal finite time identi fication of arbitrary linear dynamical systems,
T. Sarkar and A. Rakhlin, “Near optimal finite time identi fication of arbitrary linear dynamical systems,” in International Conf. on Machine Learning. PMLR, 2019, pp. 5610–5618
work page 2019
-
[4]
Learning nonlinea r dynamical systems from a single trajectory,
D. Foster, T. Sarkar, and A. Rakhlin, “Learning nonlinea r dynamical systems from a single trajectory,” in Proceedings of the 2nd Conf. on Learning for Dynamics and Control , vol. 120. PMLR, 2020, pp. 851–861
work page 2020
-
[5]
V ershynin, Introduction to the non-asymptotic analysis of random matrices
R. V ershynin, Introduction to the non-asymptotic analysis of random matrices. Cambridge University Press, 2012, p. 210–268
work page 2012
-
[6]
Stati stical learning theory for control: A finite-sample perspective,
A. Tsiamis, I. Ziemann, N. Matni, and G. J. Pappas, “Stati stical learning theory for control: A finite-sample perspective,” IEEE Control Systems, vol. 43, no. 6, pp. 67–97, 2023
work page 2023
-
[7]
On the sam ple complexity of the linear quadratic regulator,
S. Dean, H. Mania, N. Matni, B. Recht, and S. Tu, “On the sam ple complexity of the linear quadratic regulator,” F oundations of Compu- tational Mathematics , vol. 20, no. 4, pp. 633–679, 2020
work page 2020
-
[8]
N. Chatzikiriakos, R. Str¨ asser, F. Allg¨ ower, and A. Ia nnelli, “End-to- end guarantees for indirect data-driven control of bilinea r systems with finite stochastic data,” Automatica, vol. 187, p. 112908, 2026
work page 2026
-
[9]
Set membership identificatio n of non- linear systems,
M. Milanese and C. Novara, “Set membership identificatio n of non- linear systems,” Automatica, vol. 40, no. 6, pp. 957–975, 2004
work page 2004
-
[10]
From no isy data to feedback controllers: Nonconservative design via a matrix s- lemma,
H. J. van Waarde, M. K. Camlibel, and M. Mesbahi, “From no isy data to feedback controllers: Nonconservative design via a matrix s- lemma,” IEEE Transactions on Automatic Control , vol. 67, no. 1, pp. 162–175, 2022
work page 2022
-
[11]
Quadratic matrix inequalities with applications to data- based control,
H. J. van Waarde, M. K. Camlibel, J. Eising, and H. L. Tren telman, “Quadratic matrix inequalities with applications to data- based control,” SIAM J. on Control and Optimization , vol. 61, no. 4, pp. 2251–2281, 2023
work page 2023
-
[12]
Formulas for data-driven cont rol: Stabi- lization, optimality, and robustness,
C. De Persis and P . Tesi, “Formulas for data-driven cont rol: Stabi- lization, optimality, and robustness,” IEEE Transactions on Automatic Control, vol. 65, no. 3, pp. 909–924, 2020
work page 2020
-
[13]
Robust data- driven state-feedback design,
J. Berberich, A. Koch, C. W. Scherer, and F. Allg¨ ower, “ Robust data- driven state-feedback design,” in 2020 American Control Conf. (ACC) , 2020, pp. 1532–1538
work page 2020
-
[14]
Data-driven estimator s ynthesis with instantaneous noise,
F. Br¨ andle and F. Allg¨ ower, “Data-driven estimator s ynthesis with instantaneous noise,” in 2025 IEEE 64th Conf. on Decision and Control (CDC), 2025, pp. 367–372
work page 2025
-
[15]
Y . Li, J. Y u, L. Conger, T. Kargin, and A. Wierman, “Learn ing the uncertainty sets of linear control systems via set membersh ip: A non- asymptotic analysis,” in 41st International Conf. on Machine Learning , 2024
work page 2024
-
[16]
Gaussian inf erence for data-driven state-feedback design of nonlinear system s,
T. Martin, T. B. Sch¨ on, and F. Allg¨ ower, “Gaussian inf erence for data-driven state-feedback design of nonlinear system s,” IF AC- PapersOnLine, vol. 56, no. 2, pp. 4796–4803, 2023, 22nd IFAC World Congress
work page 2023
-
[17]
Active learning fo r nonlin- ear system identification with guarantees,
H. Mania, M. I. Jordan, and B. Recht, “Active learning fo r nonlin- ear system identification with guarantees,” J. of Machine Learning Research, vol. 23, no. 32, pp. 1–30, 2022
work page 2022
-
[18]
A system parameterization for direct data- driven estimator synthesis,
F. Br¨ andle and F. Allg¨ ower, “A system parameterization for direct data- driven estimator synthesis,” IEEE Control Systems Letters , vol. 9, pp. 1225–1230, 2025
work page 2025
-
[19]
Linear Matrix Inequality in Control,
S. Weiland and C. Scherer, “Linear Matrix Inequality in Control,” Lecture Notes, Dutch Institute for Systems and Control, Del ft, 2000
work page 2000
-
[20]
Active learning for ide ntification of linear dynamical systems,
A. Wagenmaker and K. Jamieson, “Active learning for ide ntification of linear dynamical systems,” in Conf. on Learning Theory . PMLR, 2020, pp. 3487–3582
work page 2020
-
[21]
H idden con- vexity in active learning: A convexified online input design for ARX systems,
N. Chatzikiriakos, B. Song, P . Rank, and A. Iannelli, “H idden con- vexity in active learning: A convexified online input design for ARX systems,” in IEEE 64th Conf. on Decision and Control (CDC) , 2025
work page 2025
-
[22]
Sample complexity bounds for linear system identification from a finite set,
N. Chatzikiriakos and A. Iannelli, “Sample complexity bounds for linear system identification from a finite set,” IEEE Control Systems Letters, vol. 8, pp. 2751–2756, 2024
work page 2024
-
[23]
Robust exploration in linear quadratic reinforcement lea rning,
J. Umenberger, M. Ferizbegovic, T. B. Sch¨ on, and H. Hja lmarsson, “Robust exploration in linear quadratic reinforcement lea rning,” Ad- vances in Neural Information Processing Systems , vol. 32, 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.