Recognition: no theorem link
On Optimizing Electrode Configuration for Wrist-Worn sEMG-Based Thumb Gesture Recognition
Pith reviewed 2026-05-10 19:36 UTC · model grok-4.3
The pith
For wrist-worn sEMG-based thumb gesture recognition, optimizing electrode placement and the referencing scheme outperforms using a large number of electrodes over a broad area.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Experimental results show that extensor-side electrodes outperform flexor-side electrodes, monopolar recordings consistently outperform bipolar configurations, and increasing channel count enhances performance but exhibits diminishing returns. Electrode spatial distribution introduces a trade-off between spatial coverage and compactness. The findings suggest that the effectiveness of wrist-worn sEMG systems depends less on the deployment of a large number of electrodes in a broad sensing area and more on the optimization of electrode placement and the referencing scheme.
What carries the argument
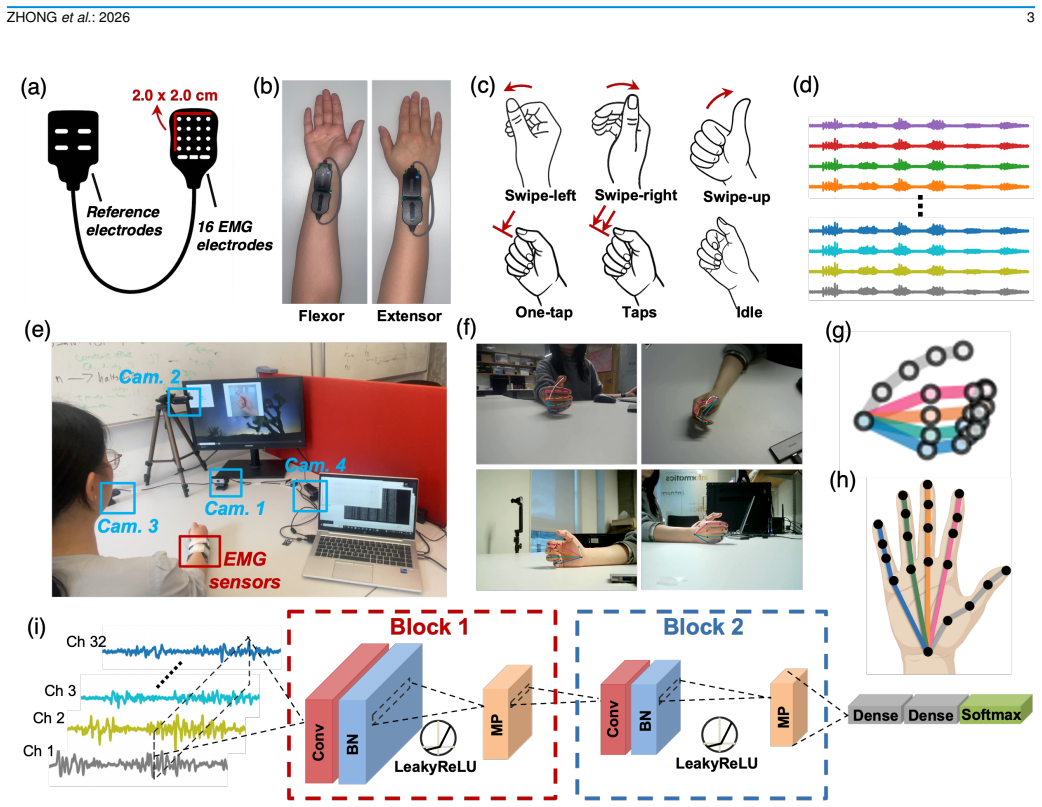
Strategies for electrode configuration that vary muscle region, reference scheme, channel count, and spatial density in high-density and low-density sEMG systems for thumb gesture recognition.
If this is right
- Placing electrodes on the extensor side of the wrist improves recognition rates compared to the flexor side.
- Monopolar referencing provides superior performance to bipolar setups.
- Higher channel counts improve results up to a point, after which additional sensors add little value.
- Balancing electrode spread against device size is necessary for effective compact systems.
Where Pith is reading between the lines
- This could simplify the design of always-on wearable controllers by reducing the required hardware footprint.
- The placement insights may help in adapting the system to other types of hand gestures or movements.
- Verification in diverse user groups and everyday environments would strengthen the guidelines for practical use.
Load-bearing premise
The benefits of optimized electrode placement and monopolar referencing observed in the study will apply to other users, hardware variations, and real-life use cases without the need for retraining.
What would settle it
Demonstrating in new experiments that a broad high-density electrode array with bipolar referencing achieves equal or higher accuracy than the optimized low-density monopolar setup on the extensor side would undermine the paper's recommendation.
Figures




read the original abstract
Thumb gestures provide an effective and unobtrusive input modality for wearable and always-available human-machine interaction. Wrist-worn surface electromyography (sEMG) has emerged as a promising approach for compact and wearable human-machine interfaces. However, compared to forearm sEMG, the impact of electrode configuration on wrist-based decoding performance remains understudied. We systematically investigated electrode configuration strategies for wrist-based thumb-movement recognition using high-density (HD) and low-density (LD) sEMG measurement systems. We considered factors such as muscle region, reference scheme, channel count, and spatial density of the electrode. Experimental results show that 1) extensor-side electrodes outperform flexor-side electrodes (HD: 0.871 vs. 0.821; LD: 0.769 vs. 0.705); 2) monopolar recordings consistently outperform bipolar configurations (15 channel with HD monopolar vs. LD bipolar: 0.885 vs. 0.823); and 3) increasing channel count enhances performance, but exhibits diminishing returns. We further show that electrode spatial distribution introduces a trade-off between spatial coverage and compactness. The findings suggest that the effectiveness of wrist-worn sEMG systems depends less on the deployment of a large number of electrodes in a broad sensing area and more on the optimization of electrode placement and the referencing scheme. This work provides practical guidelines for developing efficient wrist-worn sEMG-based gesture recognition systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript reports a systematic experimental comparison of electrode configurations for wrist-worn sEMG-based thumb gesture recognition, using both high-density (HD) and low-density (LD) systems. It evaluates the effects of muscle region (extensor vs. flexor), reference scheme (monopolar vs. bipolar), channel count, and spatial density. Key quantitative results include extensor-side outperforming flexor-side (HD: 0.871 vs. 0.821; LD: 0.769 vs. 0.705), monopolar outperforming bipolar (15-channel HD monopolar 0.885 vs. LD bipolar 0.823), and diminishing returns with increased channel count. The central claim is that targeted optimization of placement and referencing scheme matters more for performance than deploying large numbers of electrodes over broad areas, yielding practical guidelines for compact wearable interfaces.
Significance. If the reported trends hold under rigorous validation, the work offers concrete, actionable guidelines for designing efficient wrist-worn sEMG systems that prioritize placement and referencing over hardware scale. This addresses an understudied aspect relative to forearm sEMG and could support more compact, always-available HCI devices. The systematic factor-by-factor comparison is a strength, providing empirical trends that can inform future hardware and algorithm design in wearable computing.
major comments (1)
- [Abstract and Results] Abstract and Results section: The reported accuracy differences (e.g., 0.871 vs. 0.821 for extensor vs. flexor in HD; 0.885 vs. 0.823 for monopolar vs. bipolar) are presented without any details on the number of subjects, cross-validation procedure, classifier used, or statistical significance testing. This is load-bearing for the central claim because the reliability and generalizability of the performance gaps cannot be assessed without these elements.
minor comments (2)
- [Abstract] Abstract: The quantitative results would benefit from a brief parenthetical note on experimental scale (e.g., subject count) to give readers immediate context.
- [Figures and Tables] Ensure all figures and tables explicitly label the exact electrode configurations, referencing schemes, and channel counts being compared for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the presentation of our results. We address the major comment below and have revised the manuscript to improve clarity and accessibility.
read point-by-point responses
-
Referee: [Abstract and Results] Abstract and Results section: The reported accuracy differences (e.g., 0.871 vs. 0.821 for extensor vs. flexor in HD; 0.885 vs. 0.823 for monopolar vs. bipolar) are presented without any details on the number of subjects, cross-validation procedure, classifier used, or statistical significance testing. This is load-bearing for the central claim because the reliability and generalizability of the performance gaps cannot be assessed without these elements.
Authors: We agree that the abstract and results sections would benefit from a concise summary of the key methodological parameters to allow readers to evaluate the reported differences more readily. The full experimental details, including the participant cohort, cross-validation procedure, classifier, and statistical analysis, are provided in the Methods section. In the revised manuscript we have added a brief summary of these elements to the abstract and inserted an introductory paragraph in the Results section that outlines the analysis pipeline and reports the outcomes of the statistical tests. This change directly addresses the concern without altering the underlying data or claims. revision: yes
Circularity Check
No significant circularity: empirical electrode comparison
full rationale
The paper reports direct experimental measurements of classification accuracy for thumb gestures under varied wrist sEMG electrode configurations (muscle region, reference scheme, channel count, spatial density) using both HD and LD hardware. All load-bearing claims (extensor-side superiority, monopolar advantage, diminishing returns with channel count) are stated as outcomes of the recorded data trends rather than derived from equations, fitted parameters, or prior self-citations. No self-definitional loops, ansatz smuggling, or uniqueness theorems appear; the work is self-contained against its own test set and does not reduce any prediction to its inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Anatomy, physiology, and functional restoration of the thumb,
E. T. Emerson, T. J. Krizek, and D. P. Greenwald, “Anatomy, physiology, and functional restoration of the thumb,”Annals of plastic surgery, vol. 36, no. 2, pp. 180–191, 1996
1996
-
[2]
Hand rehabilitation robotics on poststroke motor recovery,
Z. Yue, X. Zhang, and J. Wang, “Hand rehabilitation robotics on poststroke motor recovery,”Behavioural neurology, vol. 2017, no. 1, p. 3908135, 2017. 10
2017
-
[3]
Robotic hand augmentation drives changes in neural body representation,
P. Kieliba, D. Clode, R. Maimon-Mor, and T. R. Makin, “Robotic hand augmentation drives changes in neural body representation,”Science robotics, vol. 6, no. 54, p. eabd7935, 2021
2021
-
[4]
Stmg: a machine learning microgesture recognition system for supporting thumb-based vr/ar input,
K. Kin, C. Wan, K. Koh, A. Marin, N. C. Camg ¨oz, Y . Zhang, Y . Cai, F. Kovalev, M. Ben-Zacharia, S. Hoopleet al., “Stmg: a machine learning microgesture recognition system for supporting thumb-based vr/ar input,” inProceedings of the 2024 CHI Conference on Human Factors in Computing Systems, 2024, pp. 1–15
2024
-
[5]
Grab-n-go: On-the-go microgesture recognition with objects in hand,
C.-J. Lee, J. Li, T. C. Yu, R. Zhang, V . Gunda, F. Guimbreti `ere, and C. Zhang, “Grab-n-go: On-the-go microgesture recognition with objects in hand,”Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, vol. 9, no. 3, pp. 1–27, 2025
2025
-
[6]
Digits: freehand 3d interactions anywhere using a wrist-worn gloveless sensor,
D. Kim, O. Hilliges, S. Izadi, A. D. Butler, J. Chen, I. Oikonomidis, and P. Olivier, “Digits: freehand 3d interactions anywhere using a wrist-worn gloveless sensor,” inProceedings of the 25th annual ACM symposium on User interface software and technology, 2012, pp. 167–176
2012
-
[7]
Deep feature learning from electromyographic signals for gesture recognition systems,
W. Zhong, X. Jiang, K. Szymaniak, M. Jabbari, C. Ma, and K. Nazar- pour, “Deep feature learning from electromyographic signals for gesture recognition systems,”IEEE Transactions on Neural Systems and Reha- bilitation Engineering, 2025
2025
-
[8]
Surface emg-based inter-session gesture recognition enhanced by deep domain adaptation,
Y . Du, W. Jin, W. Wei, Y . Hu, and W. Geng, “Surface emg-based inter-session gesture recognition enhanced by deep domain adaptation,” Sensors, vol. 17, no. 3, p. 458, 2017
2017
-
[9]
Open access dataset, toolbox and benchmark processing results of high-density surface electromyogram recordings,
X. Jiang, X. Liu, J. Fan, X. Ye, C. Dai, E. A. Clancy, M. Akay, and W. Chen, “Open access dataset, toolbox and benchmark processing results of high-density surface electromyogram recordings,”IEEE Trans- actions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 1035–1046, 2021
2021
-
[10]
Distanet: grasp-specific distance biofeedback promotes the retention of myoelectric skills,
C. Ma and K. Nazarpour, “Distanet: grasp-specific distance biofeedback promotes the retention of myoelectric skills,”Journal of Neural Engi- neering, vol. 21, no. 3, p. 036037, 2024
2024
-
[11]
Emerging wearable interfaces and algorithms for hand gesture recognition: A survey,
S. Jiang, P. Kang, X. Song, B. P. Lo, and P. B. Shull, “Emerging wearable interfaces and algorithms for hand gesture recognition: A survey,”IEEE Reviews in Biomedical Engineering, vol. 15, pp. 85–102, 2021
2021
-
[12]
Finger tracking using wrist-worn emg sensors,
J. Cao, Y . Liu, L. Han, and Z. Li, “Finger tracking using wrist-worn emg sensors,”IEEE Transactions on Mobile Computing, 2024
2024
-
[13]
Feasibility of wrist-worn, real-time hand, and surface gesture recognition via semg and imu sensing,
S. Jiang, B. Lv, W. Guo, C. Zhang, H. Wang, X. Sheng, and P. B. Shull, “Feasibility of wrist-worn, real-time hand, and surface gesture recognition via semg and imu sensing,”IEEE Transactions on Industrial Informatics, vol. 14, no. 8, pp. 3376–3385, 2017
2017
-
[14]
Electromyography- based gesture recognition: Is it time to change focus from the forearm to the wrist?
F. S. Botros, A. Phinyomark, and E. J. Scheme, “Electromyography- based gesture recognition: Is it time to change focus from the forearm to the wrist?”IEEE Transactions on Industrial Informatics, vol. 18, no. 1, pp. 174–184, 2020
2020
-
[15]
Comparing online wrist and forearm emg-based control using a rhythm game-inspired evaluation environment,
R. Meredith, E. Eddy, S. Bateman, and E. Scheme, “Comparing online wrist and forearm emg-based control using a rhythm game-inspired evaluation environment,”Journal of Neural Engineering, vol. 21, no. 4, p. 046057, 2024
2024
-
[16]
From zero-to few-shot: deep temporal learning of wrist emg enables scalable cross-user gesture recognition,
F. S. Botros, H. E. Williams, A. Phinyomark, and E. J. Scheme, “From zero-to few-shot: deep temporal learning of wrist emg enables scalable cross-user gesture recognition,”Journal of Neural Engineering, vol. 22, no. 5, p. 056018, 2025
2025
-
[17]
Improving multi-position training performance on reducing limb condition effect in wrist myoelectric control,
J. He, S. Qu, C. Lin, and N. Jiang, “Improving multi-position training performance on reducing limb condition effect in wrist myoelectric control,”IEEE Robotics and Automation Letters, 2025
2025
-
[18]
Myogestic: Emg interfacing framework for decoding multiple spared motor dimensions in individuals with neural lesions,
R. C. Simpetru, D. I. Braun, A. U. Simon, M. M ¨arz, V . Cnejevici, D. S. de Oliveira, N. Weber, J. Walter, J. Franke, D. H ¨oglingeret al., “Myogestic: Emg interfacing framework for decoding multiple spared motor dimensions in individuals with neural lesions,”Science Advances, vol. 11, no. 15, p. eads9150, 2025
2025
-
[19]
Far-field electric potentials provide access to the output from the spinal cord from wrist-mounted sensors,
I. M. Guerra, D. Y . Barsakcioglu, I. Vujaklija, D. Z. Wetmore, and D. Farina, “Far-field electric potentials provide access to the output from the spinal cord from wrist-mounted sensors,”Journal of Neural Engineering, vol. 19, no. 2, p. 026031, 2022
2022
-
[20]
Non-invasive neural interfacing for tetraplegic individuals using residual motor neuron activity decoded at the forearm or wrist,
X. Yang, D. S. De Oliveira, D. I. Braun, M. Ponfick, D. Farina, and A. Del Vecchio, “Non-invasive neural interfacing for tetraplegic individuals using residual motor neuron activity decoded at the forearm or wrist,”IEEE Journal of Biomedical and Health Informatics, 2025
2025
-
[21]
MediaPipe: A Framework for Building Perception Pipelines
C. Lugaresi, J. Tang, H. Nash, C. McClanahan, E. Uboweja, M. Hays, F. Zhang, C.-L. Chang, M. G. Yong, J. Leeet al., “Mediapipe: A framework for building perception pipelines,”arXiv preprint arXiv:1906.08172, 2019
work page internal anchor Pith review arXiv 1906
-
[22]
Anipose: A toolkit for robust markerless 3d pose estimation,
P. Karashchuk, K. L. Rupp, E. S. Dickinson, S. Walling-Bell, E. Sanders, E. Azim, B. W. Brunton, and J. C. Tuthill, “Anipose: A toolkit for robust markerless 3d pose estimation,”Cell reports, vol. 36, no. 13, 2021
2021
-
[23]
Decoding hd-emg signals for myoelectric control-how small can the analysis window size be?
R. N. Khushaba and K. Nazarpour, “Decoding hd-emg signals for myoelectric control-how small can the analysis window size be?”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8569–8574, 2021
2021
-
[24]
Leveraging extended windows in end-to-end deep learning for improved continuous myoelectric locomotion prediction,
Y . Lin, Y . Zhang, W. Zhong, W. Xiong, Z. Xi, Y .-F. Chen, and M. Zhang, “Leveraging extended windows in end-to-end deep learning for improved continuous myoelectric locomotion prediction,”IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025
2025
-
[25]
How do semg segmentation parameters influence pattern recognition process? an approach based on wearable semg sensor,
J. J. A. M. Junior, C. E. Pontim, T. S. Dias, and D. P. Campos, “How do semg segmentation parameters influence pattern recognition process? an approach based on wearable semg sensor,”Biomedical Signal Processing and Control, vol. 81, p. 104546, 2023
2023
-
[26]
An optimized electrode configuration for wrist wearable emg-based hand gesture recognition using machine learning,
K. S. Prakash and N. Kunju, “An optimized electrode configuration for wrist wearable emg-based hand gesture recognition using machine learning,”Expert Systems with Applications, vol. 274, p. 127040, 2025
2025
-
[27]
Optimizing the feature set and electrode configuration of high-density electromyogram via interpretable deep forest,
J. Li, X. Jiang, X. Liu, F. Jia, and C. Dai, “Optimizing the feature set and electrode configuration of high-density electromyogram via interpretable deep forest,”Biomedical Signal Processing and Control, vol. 87, p. 105445, 2024
2024
-
[28]
A spatio- temporal graph convolutional network for gesture recognition from high- density electromyography,
W. Zhong, Y . Zhang, P. Fu, W. Xiong, and M. Zhang, “A spatio- temporal graph convolutional network for gesture recognition from high- density electromyography,” in2023 29th International Conference on Mechatronics and Machine Vision in Practice (M2VIP). IEEE, 2023, pp. 1–6
2023
-
[29]
User-tailored hand gesture recognition system for wearable prosthesis and armband based on surface electromyogram,
L. Meng, X. Jiang, X. Liu, J. Fan, H. Ren, Y . Guo, H. Diao, Z. Wang, C. Chen, C. Daiet al., “User-tailored hand gesture recognition system for wearable prosthesis and armband based on surface electromyogram,” IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1–16, 2022
2022
-
[30]
Analysis of electrode locations on limb condition effect for myoelectric pattern recognition,
H. Wang, N. Li, X. Gao, N. Jiang, and J. He, “Analysis of electrode locations on limb condition effect for myoelectric pattern recognition,” Journal of NeuroEngineering and Rehabilitation, vol. 21, no. 1, p. 177, 2024
2024
-
[31]
Axiomatic attribution for deep networks,
M. Sundararajan, A. Taly, and Q. Yan, “Axiomatic attribution for deep networks,” inInternational conference on machine learning. PMLR, 2017, pp. 3319–3328
2017
-
[32]
Electrode density affects the robustness of myoelectric pattern recognition system with and without electrode shift,
J. He, X. Sheng, X. Zhu, and N. Jiang, “Electrode density affects the robustness of myoelectric pattern recognition system with and without electrode shift,”IEEE journal of biomedical and health informatics, vol. 23, no. 1, pp. 156–163, 2018
2018
-
[33]
Miniaturized mag- netic sensors for implantable magnetomyography,
S. Zuo, H. Heidari, D. Farina, and K. Nazarpour, “Miniaturized mag- netic sensors for implantable magnetomyography,”Advanced Materials Technologies, vol. 5, no. 6, p. 2000185, 2020
2020
-
[34]
Magnetomyography: A novel modality for non- invasive muscle sensing,
R. Yun, G. Gonzalez, I. Gerrard, R. Csaky, D. Dash, E. Kittle, N. Deka, and D. Labanowski, “Magnetomyography: A novel modality for non- invasive muscle sensing,”bioRxiv, pp. 2024–04, 2024
2024
-
[35]
A generic non-invasive neuromotor interface for human-computer interaction,
P. Kaifosh and T. R. Reardon, “A generic non-invasive neuromotor interface for human-computer interaction,”Nature, vol. 645, no. 8081, pp. 702–711, 2025
2025
-
[36]
Improved prosthetic hand control with concurrent use of myoelectric and inertial measurements,
A. Krasoulis, I. Kyranou, M. S. Erden, K. Nazarpour, and S. Vi- jayakumar, “Improved prosthetic hand control with concurrent use of myoelectric and inertial measurements,”Journal of neuroengineering and rehabilitation, vol. 14, no. 1, p. 71, 2017
2017
-
[37]
Ei-lite: Electrical impedance sensing for micro-gesture recognition and pinch force estimation,
J. Zhu, T. Xu, J. Wang, E. Guan, J. Moon, S. Morvan, D. Shin, A. Colac ¸o, S. Mueller, K. Ahujaet al., “Ei-lite: Electrical impedance sensing for micro-gesture recognition and pinch force estimation,” in Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology, 2025, pp. 1–14
2025
-
[38]
Learning a hand model from dynamic movements using high-density emg and convolutional neural networks,
R. C. Simpetru, A. Arkudas, D. I. Braun, M. Osswald, D. S. de Oliveira, B. Eskofier, T. M. Kinfe, and A. Del Vecchio, “Learning a hand model from dynamic movements using high-density emg and convolutional neural networks,”IEEE Transactions on Biomedical Engineering, 2024
2024
-
[39]
A simplified wearable device powered by a generative emg network for hand-gesture recognition and gait prediction,
K. K. Kim, T. J. Zaluska, S. Skov, Y . Lee, H. Park, D. Zhong, M. Khatib, Y . Nishio, Y . Jiang, S. L. Delpet al., “A simplified wearable device powered by a generative emg network for hand-gesture recognition and gait prediction,”Nature Sensors, pp. 1–12, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.