Slip optimization on arbitrary 3D microswimmers: a reduced-dimension and boundary-integral framework
Pith reviewed 2026-05-10 17:17 UTC · model grok-4.3
The pith
A linear operator from the reciprocal theorem reduces slip optimization on 3D microswimmers to a low-dimensional problem solved with only 2r auxiliary boundary-integral flows.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Exploiting the linearity of the Stokes equations and the Lorentz reciprocal theorem produces an explicit linear operator that maps the tangential surface slip velocity directly to the swimmer's rigid-body translational and rotational velocities. This operator decouples the hydrodynamic boundary-value problem from the optimization loop, so the a priori infinite-dimensional search space for the slip is reduced to the finite dimension r of rigid-body motions. The resulting low-dimensional programming problem is solved at negligible cost once the system matrices have been assembled from 2r auxiliary flow problems computed by a high-order boundary-integral method.
What carries the argument
The explicit linear operator, obtained via the Lorentz reciprocal theorem, that maps tangential slip velocity to rigid-body velocities and thereby decouples the fluid solve from the optimization loop.
If this is right
- The optimization requires only 2r auxiliary Stokes problems solved once by a high-order boundary-integral method.
- A modified algorithm applies to axisymmetric shapes and correctly handles possible tangential rigid-body velocities.
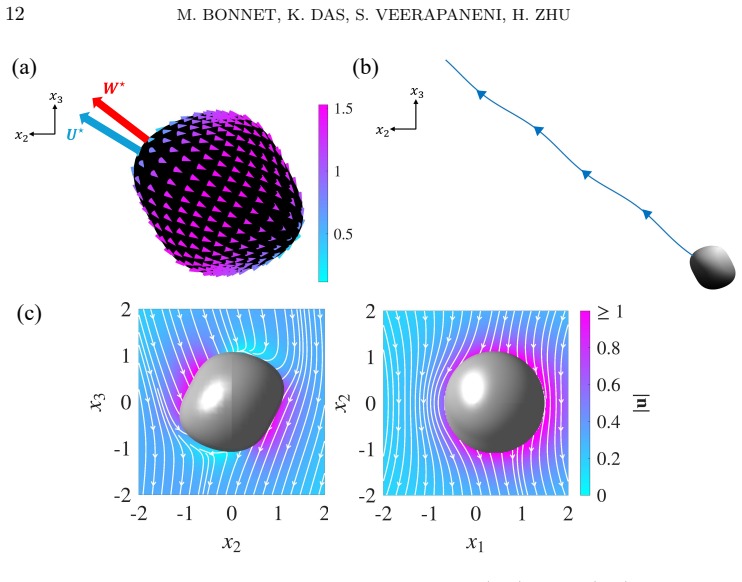
- Optimal slip distributions and resulting trajectories are obtained for swimmers of varied three-dimensional geometries.
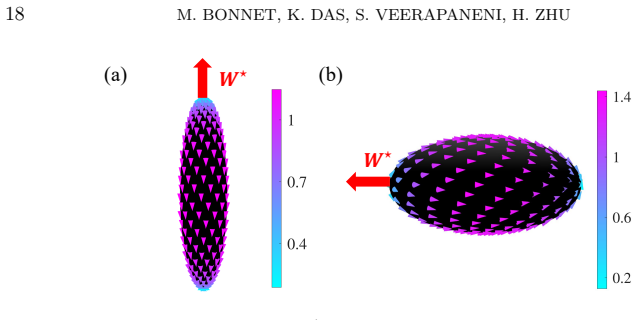
- Geometrical symmetries of the body shape directly constrain the form of the optimal motion.
Where Pith is reading between the lines
- The same reduced-dimension map could be reused to optimize different objective functions such as net torque or prescribed turning rate without recomputing the fluid operator.
- Because the approach relies only on linearity and reciprocity, it may extend to other linear Stokes-type problems such as sedimentation or phoretic motion once an analogous reciprocity identity is available.
- The boundary-integral implementation suggests that the method remains practical for highly complex or multiply connected surfaces where volumetric meshing would be prohibitive.
Load-bearing premise
The flow remains in the Stokes regime with negligible inertia and the prescribed slip is purely tangential.
What would settle it
For a chosen 3D shape, impose the computed optimal slip, solve the full unsteady Navier-Stokes equations at small but nonzero Reynolds number, and check whether the achieved rigid-body speed and power dissipation deviate from the Stokes predictions.
Figures
read the original abstract
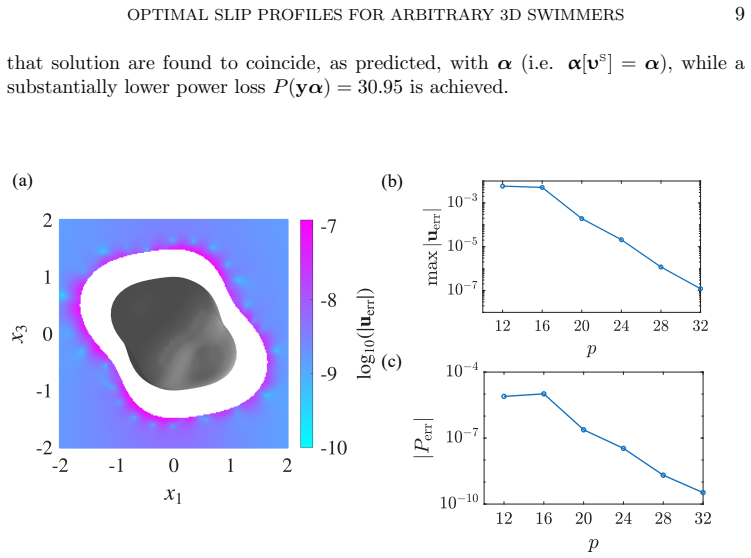
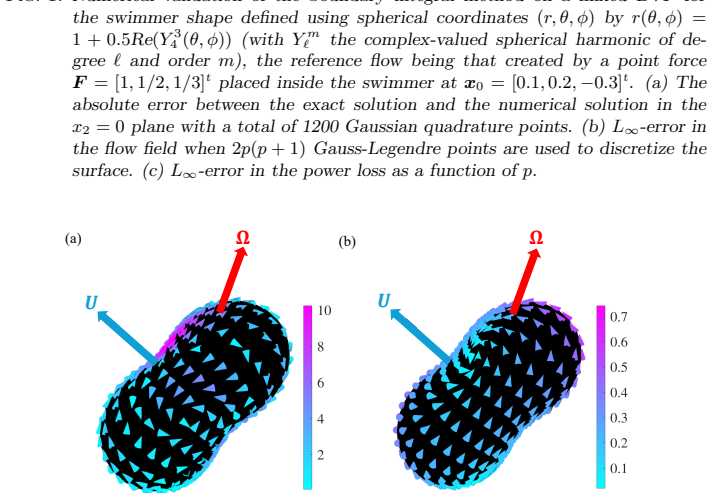
This article presents a computational framework for determining the optimal slip velocity of a microswimmer with arbitrary three-dimensional geometry suspended in a viscous fluid. The objective is to minimize the hydrodynamic power dissipation required to maintain unit speed along the net swimming direction. By exploiting the linearity of the Stokes equations and the Lorentz reciprocal theorem, we derive an explicit linear operator that maps the tangential surface slip velocity to the resulting rigid-body translational and rotational velocities, effectively decoupling the hydrodynamic boundary value problem from the optimization loop. The a priori infinite-dimensional search space for the slip optimization is reduced to the finite dimension $r$ of rigid-body motions by finding an appropriate subspace of the operator's domain. This reduces the PDE-constrained optimization to a low-dimensional programming problem that can be solved at negligible computational cost once the system matrices are assembled. The optimization algorithm requires 2$r$ auxiliary flow problems that are solved numerically using a high-order boundary integral method. We validate the accuracy of the proposed method and present optimal slip profiles and swimming trajectories for a variety of microswimmer shapes. We investigate the effect of some common geometrical symmetries of the swimmer shape on the resulting optimal motion, and in particular present a modified version of the slip optimization algorithm for axisymmetric shapes, where tangential rigid-body velocities may occur
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper introduces a computational framework for optimizing the tangential slip velocity distribution on arbitrary 3D microswimmers to minimize hydrodynamic power dissipation while achieving unit swimming speed. Using the linearity of the Stokes equations and the Lorentz reciprocal theorem, the authors derive an explicit linear operator that maps the slip velocity to the resulting rigid-body translational and rotational velocities. This allows the PDE-constrained optimization to be reduced to a low-dimensional quadratic programming problem after solving a fixed number (2r) of auxiliary boundary-integral problems, where r is the dimension of rigid-body motions. The method is validated on multiple shapes and adapted for axisymmetric geometries.
Significance. If valid, the framework significantly advances the design of microswimmers by providing an efficient, decoupled optimization approach that avoids repeated full PDE solves. The boundary-integral method ensures high-order accuracy for complex 3D geometries, and the symmetry reduction for axisymmetric cases adds practical value. The approach is grounded in fundamental fluid mechanics principles without ad-hoc parameters, enabling reproducible and extensible results for applications in microfluidics and synthetic biology.
minor comments (3)
- The final sentence of the abstract is truncated ('where tangential rigid-body velocities may occur').
- §2.2: The precise definition of the linear operator L and its adjoint could be cross-referenced more explicitly to the reciprocal theorem identity used to enforce force/torque-free conditions.
- Table 1: The reported error norms for the sphere test case would benefit from an additional column showing the number of boundary elements used, to allow direct assessment of convergence.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation for minor revision. We appreciate the recognition of the framework's efficiency and grounding in the Lorentz reciprocal theorem.
Circularity Check
No significant circularity; derivation is self-contained from standard Stokes theory
full rationale
The central derivation obtains an explicit linear operator mapping tangential slip to rigid-body velocities (U, ω) directly from the linearity of the Stokes equations and the Lorentz reciprocal theorem. These are external, established principles with no dependence on the paper's own results, fitted parameters, or prior self-citations. The subsequent reduction of the infinite-dimensional slip space to a finite r-dimensional subspace follows mathematically from the 6-dimensional range of the rigid-body map and the force/torque-free constraints enforced by reciprocity; this step is a direct algebraic consequence rather than a redefinition or fitted prediction. No self-citation chains, ansatzes smuggled via citation, or renaming of known results appear in the load-bearing steps. The framework remains independent of the optimization loop it enables.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Stokes equations govern the flow around the microswimmer
- standard math Lorentz reciprocal theorem applies to the Stokes flow
Reference graph
Works this paper leans on
-
[1]
E. L. Allgower, K. Georg, R. Miranda, and J. Tausch , Numerical exploitation of equi- variance., Z. Angew. Math. Mech., 78 (1998), pp. 795–806
work page 1998
-
[2]
J. R. Blake , A spherical envelope approach to ciliary propulsion , J. Fluid Mech., 46 (1971), pp. 199–208
work page 1971
-
[3]
Bossavit, Symmetry, groups, and boundary value problems
A. Bossavit, Symmetry, groups, and boundary value problems. a progressive introduction to noncommutative harmonic analysis of partial differential equations in domains with geo- metrical symmetry, Comput. Meth. Appl. Mech. Engrg., 56 (1986), pp. 167–215
work page 1986
-
[4]
E. Corona, L. Greengard, M. Rachh, and S. Veerapaneni , An integral equation formu- lation for rigid bodies in stokes flow in three dimensions , J. Comput. Phys., 332 (2017), pp. 504–519, https://doi.org/https://doi.org/10.1016/j.jcp.2016.12.018
-
[5]
H. Crenshaw and L. Edelstein-Keshet , Orientation by helical motion—II. Changing the direction of the axis of motion , Bulletin of Mathematical Biology, 55 (1993), pp. 213–230
work page 1993
-
[6]
K. Das, H. Zhu, M. Bonnet, and S. Veerapaneni , Squirmers with arbitrary shape and slip: modeling, simulation, and optimization , 2026, submitted, http://arxiv.org/abs/2602. 19336
work page 2026
-
[7]
A. DeSimone , Micro-swimmers with periodically beating cilia and their discrete helical trajec- tories, Available at arXiv:2006.00762, (2020)
-
[8]
R. Dreyfus, J. Baudry, M. L. Roper, M. Fermigier, H. A. Stone, and J. Bibette , Mi- croscopic artificial swimmers, Nature, 437 (2005), pp. 862–865
work page 2005
-
[9]
Z. Gimbutas and S. K. Veerapaneni , A fast algorithm for spherical grid rotations and its application to singular quadrature , SIAM J. Sci. Comput., 35 (2013), pp. A2738–A2751
work page 2013
-
[10]
H. Guo, H. Zhu, R. Liu, M. Bonnet, and S. S. Veerapaneni , Optimal slip velocities of micro-swimmers with arbitrary axisymmetric shapes , J. Fluid Mech., 910 (2021), p. A26
work page 2021
-
[11]
T. Ishikawa, Fluid dynamics of squirmers and ciliated microorganisms , Annual Review of Fluid Mechanics, 56 (2024), pp. 119–145
work page 2024
-
[12]
E. Lauga and T. R. Powers , The hydrodynamics of swimming microorganisms , Reports on Progress in Physics, 72 (2009), p. 096601. 22 M. BONNET, K. DAS, S. VEERAPANENI, H. ZHU
work page 2009
- [13]
-
[14]
M. J. Lighthill , On the squirming motion of nearly spherical deformable bodies , Communi- cations on Pure and Applied Mathematics, 5 (1952), pp. 109–118
work page 1952
-
[15]
R. Liu, H. Zhu, H. Guo, M. Bonnet, and S. S. Veerapaneni , Shape optimization of slip- driven axisymmetric microswimmers, SIAM J. Sci. Comput., 47 (2025), pp. A1065–A1090
work page 2025
-
[16]
H. Masoud and H. A. Stone , The reciprocal theorem in fluid dynamics and transport phe- nomena, J. Fluid Mech., 879 (2019), p. P1, https://doi.org/10.1017/jfm.2019.553
-
[17]
S. Michelin and E. Lauga , Efficiency optimization and symmetry-breaking in a model of ciliary locomotion, Physics of Fluids, 22 (2010), p. 111901
work page 2010
-
[18]
B. Nasouri, A. Vilfan, and R. Golestanian , Minimum dissipation theorem for microswim- mers, Phys. Rev. Lett., 126 (2021), p. 034503
work page 2021
-
[19]
T. J. Pedley , Spherical squirmers: models for swimming micro-organisms , IMA J. Appl. Math., 81 (2016), pp. 488–521
work page 2016
-
[20]
C. Pozrikidis , Boundary integral and singularity methods for linearized viscous flow , Cam- bridge University Press, 1992
work page 1992
-
[21]
E. M. Purcell , Life at low Reynolds number , Am. J. Phys, 45 (1977), pp. 3–11
work page 1977
-
[22]
S. Samatas and J. S. Lintuvuori , Hydrodynamic synchronization of chiral microswimmers , Phys. Rev. Lett., 130 (2023), p. 024001
work page 2023
-
[23]
H. A. Stone and A. D. T. Samuel , Propulsion of microorganisms by surface distortions , Phys. Rev. Lett., 77 (1996), pp. 4102–4104
work page 1996
-
[24]
Temam , Navier-Stokes equations
R. Temam , Navier-Stokes equations. Theory and numerical analysis. , North-Holland, 1979
work page 1979
-
[25]
A. C. Tsang, E. Demir, Y. Ding, and O. S. Pak , Roads to smart artificial microswimmers , Advanced Intelligent Systems, 2 (2020), p. 1900137
work page 2020
-
[26]
S. Veerapaneni, A. Rahimian, G. Biros, and D. Zorin , A fast algorithm for simulating vesicle flows in three dimensions , J. Comput. Phys., 230 (2011), pp. 5610–5614
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.