Recognition: unknown
Shocks, instability, and the twenty networks of infinite geodesics in the Directed Landscape
Pith reviewed 2026-05-10 13:55 UTC · model grok-4.3
The pith
Shock structures of eternal solutions fully reconstruct the instability region in the KPZ fixed point.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
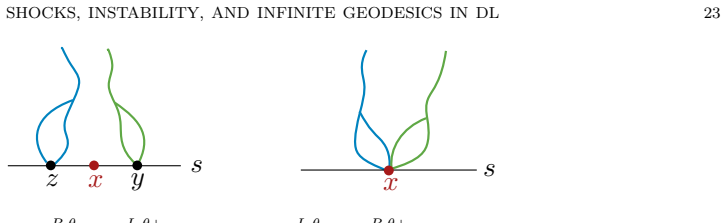
In the directed landscape, the shock structures of two eternal solutions with identical asymptotic velocity completely determine the instability region where those solutions differ. Every collection of semi-infinite geodesics emanating from an arbitrary space-time point belongs to one of twenty topologically distinct networks, and these networks encode the precise locations and interactions of shocks and instabilities.
What carries the argument
Networks of semi-infinite geodesics in the directed landscape, whose twenty possible configurations encode the shock and instability structures of the KPZ fixed point.
If this is right
- The instability region between any two eternal solutions is completely recoverable from their shock locations alone.
- Every semi-infinite geodesic network from any point falls into one of twenty fixed topological types.
- The geometric interplay between shocks and instabilities holds uniformly for all space-time starting points.
- Reconstruction of the instability region works directly from the velocity field discontinuities without additional data.
Where Pith is reading between the lines
- The classification supplies a concrete way to detect instability regions in numerical simulations by tracking only shock locations.
- The same geodesic-network dictionary may apply to other last-passage or polymer models in the KPZ class once their scaling limits are established.
- The twenty networks suggest a finite-state description of local geodesic behavior that could be used to build efficient sampling algorithms for the directed landscape.
Load-bearing premise
The directed landscape exists as the unique scaling limit with well-defined geodesics and shocks, and the KPZ fixed point admits eternal solutions that behave as solutions to a degenerate inviscid stochastic Hamilton-Jacobi equation.
What would settle it
A single counterexample configuration of semi-infinite geodesics from a space-time point in a discrete last-passage percolation model that matches none of the twenty classified networks would falsify the classification.
Figures




















read the original abstract
For stochastic Hamilton-Jacobi (SHJ) equations, instability points are the space-time locations where two eternal solutions with the same asymptotic velocity differ. Another fundamental structure in such equations is shocks, which are the space-time locations where the velocity field is discontinuous. In this work, we study the KPZ fixed point, the central object of the KPZ universality class, which can be viewed as a prototype--albeit degenerate--of an inviscid SHJ equation in one spatial dimension. We describe the geometric structure of the instability region and give a detailed and precise analysis of its interplay with the shock structures of the two eternal solutions. We show that these shock structures allow one to reconstruct the instability region. Along the way, we obtain a complete classification of all possible configurations of semi-infinite geodesics emanating from arbitrary space-time points, in the directed landscape--the random environment in which the KPZ fixed point evolves.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies the KPZ fixed point as a degenerate inviscid stochastic Hamilton-Jacobi equation. It describes the geometric structure of the instability region (space-time points where two eternal solutions with identical asymptotic velocity differ) and its interplay with the shock structures of those solutions. The central results are that the shock structures permit explicit reconstruction of the instability region, together with a complete classification of all possible configurations of semi-infinite geodesics emanating from arbitrary space-time points in the directed landscape, which the authors enumerate as twenty distinct networks.
Significance. If the claims hold, the work supplies a self-contained geometric classification of semi-infinite geodesic networks and an explicit reconstruction of instability from shocks. This advances the theory of the directed landscape and the KPZ fixed point by furnishing exhaustive case analysis resting on the standard coalescence, uniqueness, and ordering properties already established in the literature. Such results are significant for the KPZ universality class, as they provide concrete tools for analyzing eternal solutions and could facilitate further study of related stochastic growth models. The absence of free parameters or ad-hoc constructions in the classification is a notable strength.
minor comments (3)
- The abstract states that the classification yields exactly twenty networks; a brief summary table or diagram in the introduction enumerating the configurations by their coalescence and ordering properties would improve readability.
- In the reconstruction argument, the handling of null sets (where geodesics may fail to be unique) should be stated explicitly even if it follows from cited results, to make the argument fully self-contained for readers.
- A few references to foundational papers on the directed landscape (e.g., those establishing the existence and geodesic properties) appear in the bibliography but could be cited more precisely in the statements of the classification theorems.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for the positive assessment, which accurately captures the main results on the reconstruction of the instability region from shock structures and the exhaustive classification of semi-infinite geodesic networks in the directed landscape. We are pleased that the referee finds the work significant for the KPZ universality class.
Circularity Check
No significant circularity; derivation rests on external established properties
full rationale
The manuscript supplies a self-contained geometric classification of all semi-infinite geodesic networks in the directed landscape together with an explicit reconstruction of the instability region from the shock sets of the two eternal solutions. All steps rest on the standard coalescence, uniqueness, and ordering properties of geodesics that are already established in the cited literature on the directed landscape; the case analysis enumerating the twenty networks is exhaustive within those axioms and contains no internal gaps or unverified limiting arguments. No step reduces a claimed prediction or classification to a fitted input, self-definition, or load-bearing self-citation chain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The directed landscape exists as the unique scaling limit with continuous geodesics and well-defined shock and instability structures.
- domain assumption Eternal solutions with given asymptotic velocity exist and their difference set defines instability points.
Reference graph
Works this paper leans on
-
[1]
, " * write output.state after.block = add.period write newline
ENTRY address author booktitle chapter edition editor howpublished institution journal key month note number organization pages publisher school series title type url volume year label extra.label sort.label short.list INTEGERS output.state before.all mid.sentence after.sentence after.block FUNCTION init.state.consts #0 'before.all := #1 'mid.sentence := ...
-
[2]
write newline
" write newline "" before.all 'output.state :=
-
[3]
write FUNCTION n.dashify 't :=
" write FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in capitalize " " * FUNCTION format.date year "year" bibinfo.che...
-
[4]
Aggarwal, A. , Corwin, I. and Hegde, M. (2024 a ). KPZ fixed point convergence of the ASEP and stochastic six-vertex models. Preprint ( arXiv:2412.18117 https://arxiv.org/abs/2412.18117)
-
[5]
Scaling limit of the colored ASEP and stochastic six-vertex models
Aggarwal, A. , Corwin, I. and Hegde, M. (2024 b ). Scaling limit of the colored ASEP and stochastic six-vertex models. Preprint ( arXiv 2403.01341 https://arxiv.org/abs/2403.01341)
-
[6]
Arnold, L. (1998). Random dynamical systems. Springer Monographs in Mathematics, Springer-Verlag, Berlin
1998
-
[7]
, Ganguly, S
Bates, E. , Ganguly, S. and Hammond, A. (2022). Hausdorff dimensions for shared endpoints of disjoint geodesics in the directed landscape. Electron. J. Probab. 27 Paper No. 1, 44
2022
-
[8]
Bhatia, M. (2024). Duality in the directed landscape and its applications to fractal geometry. Int. Math. Res. Not. IMRN 9633--9662
2024
-
[9]
Bhattacharjee, S. , Busani, O. and Sorensen, E. (2025). Exceptional force, uncountably many solutions in the KPZ fixed point. Preprint ( arXiv:2505.09604 https://arxiv.org/abs/2505.09604)
-
[10]
Busani, O. (2025). Non-existence of three non-coalescing infinite geodesics with the same direction in the directed landscape. Probab. Th. Rel. Fields Online first https://doi.org/10.1007/s00440-025-01451-z
-
[11]
, Sepp\" a l\" a inen, T
Busani, O. , Sepp\" a l\" a inen, T. and Sorensen, E. (2024). The stationary horizon and semi-infinite geodesics in the directed landscape. Ann. Probab. 52 1--66
2024
-
[12]
Dauvergne, D. (2025). The 27 geodesic networks in the directed landscape. Invent. Math. 242 123--220
2025
-
[13]
, Ortmann, J
Dauvergne, D. , Ortmann, J. and Vir\' a g, B. (2022). The directed landscape. Acta Math. 229 201--285
2022
-
[14]
Dauvergne, D. and Pankratz, O. S. (2026). Geodesic networks and the disjointness gap in the directed landscape. Preprint ( arXiv:2602.09859 https://arxiv.org/abs/2602.09859)
-
[15]
The scaling limit of the longest increasing subsequence
Dauvergne, D. and Vir\'ag, B. (2021). The scaling limit of the longest increasing subsequence. Preprint ( arXiv:2104.08210 https://arxiv.org/abs/2104.08210)
-
[16]
and Sorensen, E
Dunlap, A. and Sorensen, E. (2026). Viscous shock fluctuations in KPZ . Comm. Math. Phys. 407 Paper No. 63
2026
-
[17]
, Khanin, K
E, W. , Khanin, K. , Mazel, A. and Sinai, Y. (2000). Invariant measures for B urgers equation with stochastic forcing. Ann. of Math. (2) 151 877--960
2000
-
[18]
Ganguly, S. and Zhang, L. (2022). Fractal geometry of the space-time difference profile in the directed landscape via construction of geodesic local times. Preprint ( arXiv:2204.01674 https://arxiv.org/abs/2204.01674)
-
[19]
Groathouse, S. , Janjigian, C. and Rassoul-Agha, F. (2025). Existence of generalized B usemann functions and G ibbs measures for random walks in random potentials. Trans. Amer. Math. Soc. To appear ( arXiv:2306.17714 https://arxiv.org/abs/2306.17714)
-
[20]
Janjigian, C. and Rassoul-Agha, F. (2018). B usemann functions and G ibbs measures in directed polymer models on Z ^2 . Extended version ( arXiv:1810.03580v2 https://arxiv.org/abs/1810.03580v2)
-
[21]
Janjigian, C. , Rassoul-Agha, F. and Sepp\"al\"ainen, T. (2023 a ). Ergodicity and synchronization of the K ardar- P arisi- Z hang equation. Preprint ( arXiv:2211.06779 https://arxiv.org/abs/2211.06779)
-
[22]
, Rassoul-Agha, F
Janjigian, C. , Rassoul-Agha, F. and Sepp\" a l\" a inen, T. (2023 b ). Geometry of geodesics through B usemann measures in directed last-passage percolation. J. Eur. Math. Soc. (JEMS) 25 2573--2639
2023
-
[23]
, Parisi, G
Kardar, M. , Parisi, G. and Zhang, Y.-C. (1986). Dynamic scaling of growing interfaces. Phys. Rev. Lett. 56 889--892
1986
-
[24]
, Quastel, J
Matetski, K. , Quastel, J. and Remenik, D. (2021). The KPZ fixed point. Acta Math. 227 115--203
2021
-
[25]
and Rosati, T
Perkowski, N. and Rosati, T. C. (2019). The KPZ equation on the real line. Electron. J. Probab. 24 Paper No. 117, 56
2019
-
[26]
and Vir\'ag, B
Rahman, M. and Vir\'ag, B. (2025). Infinite geodesics, competition interfaces and the second class particle in the scaling limit. Ann. Inst. Henri Poincar\'e Probab. Stat. 61 1075--1126
2025
-
[27]
Rassoul-Agha, F. and Sweeney, M. (2024). Shocks and instability in B rownian last-passage percolation. Preprint ( arXiv:2407.07866 https://arxiv.org/abs/2407.07866)
-
[28]
Rudin, W. (1976). Principles of mathematical analysis. 3rd edn. McGraw-Hill Book Co., New York-Auckland-D\" u sseldorf. International Series in Pure and Applied Mathematics
1976
-
[29]
and Sorensen, E
Sepp\" a l\" a inen, T. and Sorensen, E. (2023). Global structure of semi-infinite geodesics and competition interfaces in B rownian last-passage percolation. Probab. Math. Phys. 4 667--760
2023
-
[30]
and Vir\'ag, B
Vet o, B. and Vir\'ag, B. (2026). The geometry of coalescing random walks, the B rownian web distance and KPZ universality. Ann. Probab. 54
2026
- [31]
-
[32]
, Ferrari, P
Weiss, T. , Ferrari, P. and Spohn, H. (2017). Reflected B rownian motions in the KPZ universality class , vol. 18 of SpringerBriefs in Mathematical Physics. Springer, Cham
2017
- [33]
- [34]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.