Capability-Aware Heterogeneous Control Barrier Functions for Decentralized Multi-Robot Safe Navigation
Pith reviewed 2026-05-10 14:39 UTC · model grok-4.3
The pith
CA-HCBF unifies holonomic and nonholonomic robot dynamics under acceleration control to enforce consistent safety in decentralized heterogeneous teams.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We derive a canonical second-order control-affine representation that unifies holonomic and nonholonomic robots under acceleration-level control via canonical transformation and backstepping, preserving forward invariance of the safe set while avoiding relative-degree mismatch across heterogeneous dynamics. We introduce a support-function-based directional capability metric that quantifies each robot's ability to follow its motion intent, derive a pairwise responsibility allocation that distributes the safety burden proportionally to each robot's motion capability, and add a feasibility-aware clipping mechanism that constrains the allocation to each agent's physically achievable range.
What carries the argument
The Capability-Aware Heterogeneous Control Barrier Function (CA-HCBF) that unifies heterogeneous dynamics through canonical transformation and backstepping and distributes avoidance responsibility via a support-function directional capability metric with feasibility clipping.
If this is right
- Safety constraints become physically realizable for each robot type, eliminating violations caused by mismatched dynamics.
- Avoidance responsibility is allocated proportionally to each robot's directional capability, raising overall task efficiency.
- Feasibility clipping prevents assignment of infeasible constraints that commonly arise in dense decentralized CBF settings.
- The unified representation removes relative-degree mismatches, allowing consistent enforcement across holonomic and nonholonomic agents.
Where Pith is reading between the lines
- The same transformation approach could be applied to robots with higher-order or underactuated dynamics to produce comparable unified representations.
- Pairing the capability metric with online task assignment might allow teams to reconfigure formations around agents with temporarily limited mobility.
- In very large swarms the localized responsibility allocation could reduce required communication bandwidth compared with fully centralized safety solvers.
Load-bearing premise
A single canonical transformation and backstepping step can place every holonomic and nonholonomic robot under the same acceleration-level control-affine form while preserving forward invariance of the safe set and eliminating relative-degree mismatch for the entire team.
What would settle it
A mixed team of holonomic and nonholonomic robots placed in a dense formation where a nonholonomic agent receives an avoidance velocity command exceeding its minimum turning radius; if the framework still maintains collision-free trajectories without deadlock or violation, the claim holds.
Figures


read the original abstract
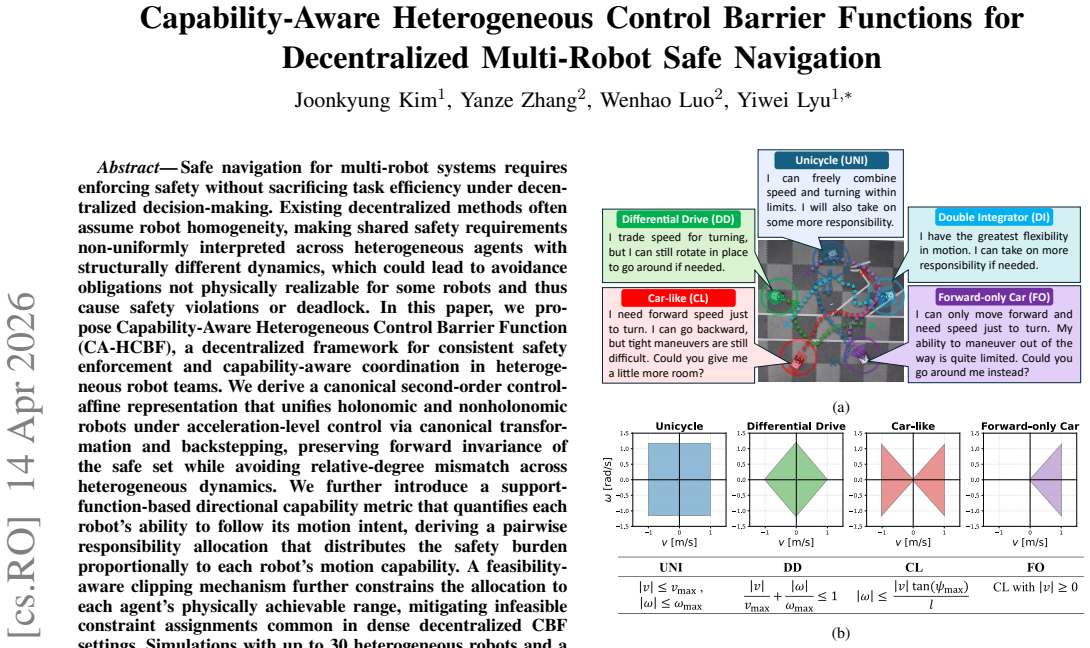
Safe navigation for multi-robot systems requires enforcing safety without sacrificing task efficiency under decentralized decision-making. Existing decentralized methods often assume robot homogeneity, making shared safety requirements non-uniformly interpreted across heterogeneous agents with structurally different dynamics, which could lead to avoidance obligations not physically realizable for some robots and thus cause safety violations or deadlock. In this paper, we propose Capability-Aware Heterogeneous Control Barrier Function (CA-HCBF), a decentralized framework for consistent safety enforcement and capability-aware coordination in heterogeneous robot teams. We derive a canonical second-order control-affine representation that unifies holonomic and nonholonomic robots under acceleration-level control via canonical transformation and backstepping, preserving forward invariance of the safe set while avoiding relative-degree mismatch across heterogeneous dynamics. We further introduce a support-function-based directional capability metric that quantifies each robot's ability to follow its motion intent, deriving a pairwise responsibility allocation that distributes the safety burden proportionally to each robot's motion capability. A feasibility-aware clipping mechanism further constrains the allocation to each agent's physically achievable range, mitigating infeasible constraint assignments common in dense decentralized CBF settings. Simulations with up to 30 heterogeneous robots and a physical multi-robot demonstration show improved safety and task efficiency over baselines, validating real-world applicability across robots with distinct kinematic constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Capability-Aware Heterogeneous Control Barrier Function (CA-HCBF) framework for decentralized safe navigation in multi-robot teams with heterogeneous dynamics. It derives a canonical second-order control-affine representation that unifies holonomic and nonholonomic robots under acceleration-level control using canonical transformation and backstepping, while preserving forward invariance of the safe set and eliminating relative-degree mismatch. The work introduces a support-function-based directional capability metric to quantify each robot's ability to follow its motion intent, derives a pairwise responsibility allocation proportional to capabilities, and adds a feasibility-aware clipping mechanism to constrain allocations to physically achievable ranges. Validation consists of simulations with up to 30 heterogeneous robots and a physical multi-robot demonstration showing improved safety and task efficiency over baselines.
Significance. If the central derivations hold, the result is significant for multi-robot control and safety-critical robotics. It provides a principled way to enforce consistent safety constraints across structurally different dynamics without centralized coordination or homogeneity assumptions, addressing a practical gap in decentralized CBF applications. The capability metric and clipping mechanism offer a concrete mechanism for proportional burden-sharing that could reduce deadlocks and infeasible commands in dense environments. The combination of theoretical unification with empirical validation on both simulation and hardware strengthens its potential impact on applications such as mixed-fleet autonomous systems.
major comments (1)
- [§3] §3 (Derivation of canonical form): the backstepping argument for nonholonomic agents must explicitly verify that the transformed barrier function derivative remains negative definite on the boundary after the acceleration-level control is substituted; the current sketch leaves open whether the virtual control input from the first step preserves the exact invariance property when the original relative degree differs.
minor comments (4)
- [Abstract, §1] The abstract and §1 use the term 'canonical transformation' without a forward reference to the specific diffeomorphism or coordinate change employed; adding a one-sentence preview would improve readability.
- [Simulations] Table 1 (simulation parameters) reports aggregate success rates but does not break down per-robot-type collision counts or deadlock occurrences; disaggregating these metrics would better support the claim of capability-aware improvement.
- [Physical demonstration] The physical experiment section describes the robot platforms but omits the explicit kinematic models and actuator limits used in the clipping mechanism; including these would aid reproducibility.
- [§2] A few citations in §2 to prior heterogeneous CBF works are present, yet the comparison paragraph does not quantify how the proposed responsibility allocation differs numerically from the closest baseline (e.g., in terms of conservatism).
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback on our manuscript. We address the single major comment below and will incorporate the requested clarification in the revised version.
read point-by-point responses
-
Referee: [§3] §3 (Derivation of canonical form): the backstepping argument for nonholonomic agents must explicitly verify that the transformed barrier function derivative remains negative definite on the boundary after the acceleration-level control is substituted; the current sketch leaves open whether the virtual control input from the first step preserves the exact invariance property when the original relative degree differs.
Authors: We agree that the backstepping argument in §3 would benefit from a more explicit verification. In the revised manuscript we will expand the relevant proof paragraph to substitute the acceleration-level control explicitly into the derivative of the transformed barrier function and show that the result remains negative definite on the boundary. This step will confirm that the virtual control from the first backstepping iteration preserves forward invariance for nonholonomic agents despite the original relative-degree difference, thereby closing the gap noted by the referee. revision: yes
Circularity Check
Derivation uses standard control-theoretic techniques without reduction to inputs
full rationale
The paper derives a canonical second-order control-affine representation for heterogeneous robots via canonical transformation and backstepping, then applies support-function capability metrics and feasibility clipping. These steps rely on established CBF forward-invariance properties and standard backstepping arguments that hold independently of the paper's specific claims; no equation reduces a result to a fitted parameter, self-definition, or self-citation chain. The unification of holonomic/nonholonomic dynamics and relative-degree handling follows directly from the transformation definitions without circularity. The overall framework is self-contained against external control-theory benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Forward invariance of the safe set is preserved under the canonical transformation and backstepping.
invented entities (2)
-
Support-function-based directional capability metric
no independent evidence
-
Feasibility-aware clipping mechanism
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Random-finite-set-based dis- tributed multirobot slam,
L. Gao, G. Battistelli, and L. Chisci, “Random-finite-set-based dis- tributed multirobot slam,”IEEE Transactions on Robotics, vol. 36, no. 6, pp. 1758–1777, 2020
work page 2020
-
[2]
Multi-agent systems for search and rescue applications,
D. S. Drew, “Multi-agent systems for search and rescue applications,” Current Robotics Reports, vol. 2, no. 2, pp. 189–200, 2021
work page 2021
-
[3]
Collaborative multi-robot search and rescue: Planning, coordination, perception, and active vision,
J. P. Queralta, J. Taipalmaa, B. C. Pullinen, V . K. Sarker, T. N. Gia, H. Tenhunen, M. Gabbouj, J. Raitoharju, and T. Westerlund, “Collaborative multi-robot search and rescue: Planning, coordination, perception, and active vision,”IEEE Access, vol. 8, pp. 191 617– 191 643, 2020
work page 2020
-
[4]
Multi-robot pickup and delivery via distributed resource allocation,
A. Camisa, A. Testa, and G. Notarstefano, “Multi-robot pickup and delivery via distributed resource allocation,”IEEE Transactions on Robotics, vol. 39, no. 2, pp. 1106–1118, 2022
work page 2022
-
[5]
Coordinating hundreds of cooperative, autonomous vehicles in warehouses,
P. R. Wurman, R. D’Andrea, and M. Mountz, “Coordinating hundreds of cooperative, autonomous vehicles in warehouses,”AI magazine, vol. 29, no. 1, pp. 9–9, 2008
work page 2008
-
[6]
Lifelong multi-agent path finding in large-scale warehouses,
J. Li, A. Tinka, S. Kiesel, J. W. Durham, T. S. Kumar, and S. Koenig, “Lifelong multi-agent path finding in large-scale warehouses,” inProc. of AAAI Conf. on Artificial Intelligence (AAAI), vol. 35, no. 13, 2021, pp. 11 272–11 281
work page 2021
-
[7]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” inProc. of European Control Conference (ECC). IEEE, 2019, pp. 3420–3431
work page 2019
-
[8]
Safety barrier certificates for collisions-free multirobot systems,
L. Wang, A. D. Ames, and M. Egerstedt, “Safety barrier certificates for collisions-free multirobot systems,”IEEE Transactions on Robotics, vol. 33, no. 3, pp. 661–674, 2017
work page 2017
-
[9]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,”IEEE Transactions on Automatic Control, vol. 62, no. 8, pp. 3861–3876, 2016
work page 2016
-
[10]
Safety-critical model predic- tive control with discrete-time control barrier function,
J. Zeng, B. Zhang, and K. Sreenath, “Safety-critical model predic- tive control with discrete-time control barrier function,” inProc. of American Control Conference (ACC). IEEE, 2021, pp. 3882–3889
work page 2021
-
[11]
Distributed implementation of control barrier functions for multi-agent systems,
X. Tan and D. V . Dimarogonas, “Distributed implementation of control barrier functions for multi-agent systems,”IEEE Control Systems Letters, vol. 6, pp. 1879–1884, 2021
work page 2021
-
[12]
C. Dawson, S. Gao, and C. Fan, “Safe control with learned certificates: A survey of neural lyapunov, barrier, and contraction methods for robotics and control,”IEEE Transactions on Robotics, vol. 39, no. 3, pp. 1749–1767, 2023
work page 2023
-
[13]
Motion planning in dynamic environments using velocity obstacles,
P. Fiorini and Z. Shiller, “Motion planning in dynamic environments using velocity obstacles,”The Int. Journal of Robotics Research, vol. 17, no. 7, pp. 760–772, 1998
work page 1998
-
[14]
Reciprocal velocity obstacles for real-time multi-agent navigation,
J. Van den Berg, M. Lin, and D. Manocha, “Reciprocal velocity obstacles for real-time multi-agent navigation,” inProc. of IEEE Int. Conf. on Robotics and Automation (ICRA), 2008, pp. 1928–1935
work page 2008
-
[15]
Reciprocal n-body collision avoidance,
J. Van Den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body collision avoidance,” inProc. of Int. Symposium of Robotics Research. Springer, 2011, pp. 3–19
work page 2011
-
[16]
Real-time obstacle avoidance for manipulators and mobile robots,
O. Khatib, “Real-time obstacle avoidance for manipulators and mobile robots,”The Int. Journal of Robotics Research, vol. 5, no. 1, pp. 90–98, 1986
work page 1986
-
[17]
Reinforced potential field for multi-robot motion planning in cluttered environ- ments,
D. Zhang, X. Zhang, Z. Zhang, B. Zhu, and Q. Zhang, “Reinforced potential field for multi-robot motion planning in cluttered environ- ments,” inProc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 699–704
work page 2023
-
[18]
L. Dai, Q. Cao, Y . Xia, and Y . Gao, “Distributed mpc for formation of multi-agent systems with collision avoidance and obstacle avoidance,” Journal of the Franklin Institute, vol. 354, no. 4, pp. 2068–2085, 2017
work page 2068
-
[19]
C. E. Luis, M. Vukosavljev, and A. P. Schoellig, “Online trajectory generation with distributed model predictive control for multi-robot motion planning,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 604–611, 2020
work page 2020
-
[20]
R. K. Cosner, Y . Chen, K. Leung, and M. Pavone, “Learning respon- sibility allocations for safe human-robot interaction with applications to autonomous driving,” inProc. of IEEE Int. Conf. on Robotics and Automation (ICRA). IEEE, 2023, pp. 9757–9763
work page 2023
-
[21]
I. Remy, D. Fridovich-Keil, and K. Leung, “Learning responsibility allocations for multi-agent interactions: A differentiable optimization approach with control barrier functions,” inProc. of American Control Conference (ACC). IEEE, 2025, pp. 3213–3220
work page 2025
-
[22]
Safety barrier certificates for heterogeneous multi-robot systems,
L. Wang, A. Ames, and M. Egerstedt, “Safety barrier certificates for heterogeneous multi-robot systems,” inProc. of American Control Conference (ACC). IEEE, 2016, pp. 5213–5218
work page 2016
-
[23]
Responsibility-associated multi- agent collision avoidance with social preferences,
Y . Lyu, W. Luo, and J. M. Dolan, “Responsibility-associated multi- agent collision avoidance with social preferences,” inProc. of IEEE Int. Conf. on Intelligent Transportation Systems. IEEE, 2022, pp. 3645–3651
work page 2022
-
[24]
Control barrier functions for systems with high relative degree,
W. Xiao and C. Belta, “Control barrier functions for systems with high relative degree,” inProc. of IEEE Conf. on Decision and Control (CDC). IEEE, 2019, pp. 474–479
work page 2019
-
[25]
S. Liu, W. Xiao, and C. A. Belta, “Auxiliary-variable adaptive control lyapunov barrier functions for spatio-temporally constrained safety- critical applications,” inProc. of IEEE Conf. on Decision and Control (CDC). IEEE, 2024, pp. 8098–8104
work page 2024
-
[26]
K. H. Kim, M. Diagne, and M. Krsti ´c, “Robust control barrier function design for high relative degree systems: Application to unknown moving obstacle collision avoidance,” inProc. of American Control Conference (ACC). IEEE, 2025, pp. 355–360
work page 2025
-
[27]
Compatibility checking of multiple control barrier functions for input constrained systems,
X. Tan and D. V . Dimarogonas, “Compatibility checking of multiple control barrier functions for input constrained systems,” inProc. of IEEE Conf. on Decision and Control (CDC). IEEE, 2022, pp. 939– 944
work page 2022
-
[28]
Hybrid control barrier func- tions for continuous-time systems,
M. Marley, R. Skjetne, and A. R. Teel, “Hybrid control barrier func- tions for continuous-time systems,”IEEE Transactions on Automatic Control, vol. 69, no. 10, pp. 6605–6619, 2024
work page 2024
-
[29]
J. Zeng, B. Zhang, Z. Li, and K. Sreenath, “Safety-critical control using optimal-decay control barrier function with guaranteed point- wise feasibility,” inProc. of American Control Conference (ACC). IEEE, 2021, pp. 3856–3863
work page 2021
-
[30]
Q. Nguyen and K. Sreenath, “Exponential control barrier functions for enforcing high relative-degree safety-critical constraints,” inProc. of American Control Conference (ACC). IEEE, 2016, pp. 322–328
work page 2016
-
[31]
J. Lee, J. Kim, and A. D. Ames, “Hierarchical relaxation of safety- critical controllers: Mitigating contradictory safety conditions with application to quadruped robots,” inProc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 2384–2391
work page 2023
-
[32]
Y . Chen, A. Singletary, and A. D. Ames, “Guaranteed obstacle avoidance for multi-robot operations with limited actuation: A control barrier function approach,”IEEE Control Systems Letters, vol. 5, no. 1, pp. 127–132, 2020
work page 2020
-
[33]
K. M. Lynch and F. C. Park,Modern Robotics. Cambridge University Press, 2017
work page 2017
-
[34]
Nonovershooting control of strict-feedback nonlinear systems,
M. Krstic and M. Bement, “Nonovershooting control of strict-feedback nonlinear systems,”IEEE Transactions on Automatic Control, vol. 51, no. 12, pp. 1938–1943, 2006
work page 1938
-
[35]
Safe back- stepping with control barrier functions,
A. J. Taylor, P. Ong, T. G. Molnar, and A. D. Ames, “Safe back- stepping with control barrier functions,” inProc. of IEEE Conf. on Decision and Control (CDC). IEEE, 2022, pp. 5775–5782
work page 2022
-
[36]
Osqp: An operator splitting solver for quadratic programs,
B. Stellato, G. Banjac, P. Goulart, A. Bemporad, and S. Boyd, “Osqp: An operator splitting solver for quadratic programs,”Mathematical Programming Computation, vol. 12, no. 4, pp. 637–672, 2020
work page 2020
-
[37]
LIMO Pro mobile robot platform,
AgileX Robotics, “LIMO Pro mobile robot platform,” https://global. agilex.ai/products/limo-pro, accessed: January 2026
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.