Early Exiting U-Net for Efficient Processing on UAVs: A Case Study in Environmental Monitoring
Pith reviewed 2026-05-10 12:23 UTC · model grok-4.3
The pith
Tiny U-Net with early exits reduces multiplications by 42% while keeping IoU comparable for oil-spill estimation on UAVs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
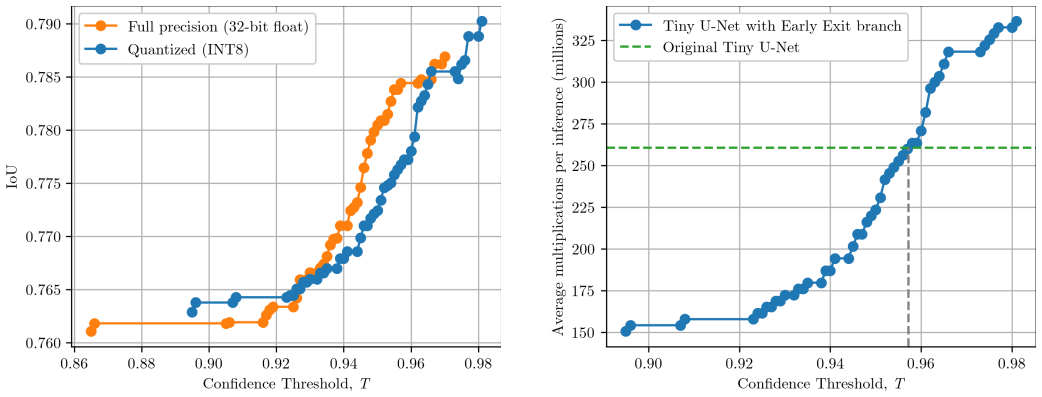
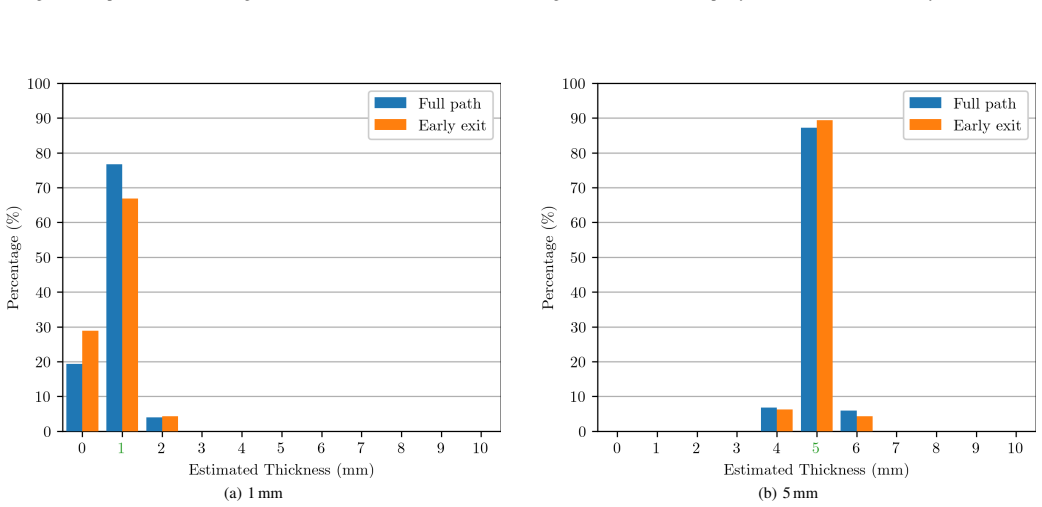
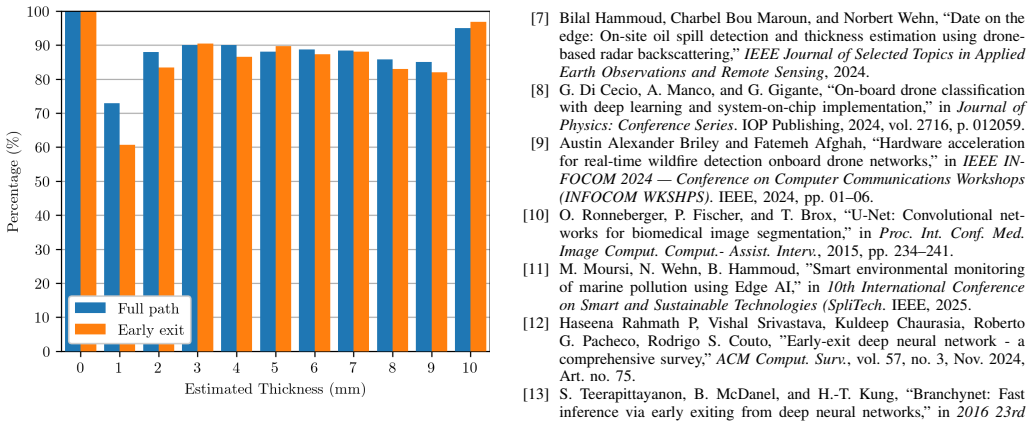
By adding an early exit branch that returns a prediction once a compact confidence score exceeds a tunable threshold, the modified Tiny U-Net achieves IoU comparable to the full baseline while reducing the average number of multiplications by up to 42% for an aggressive threshold and thereby lowering dynamic power consumption.
What carries the argument
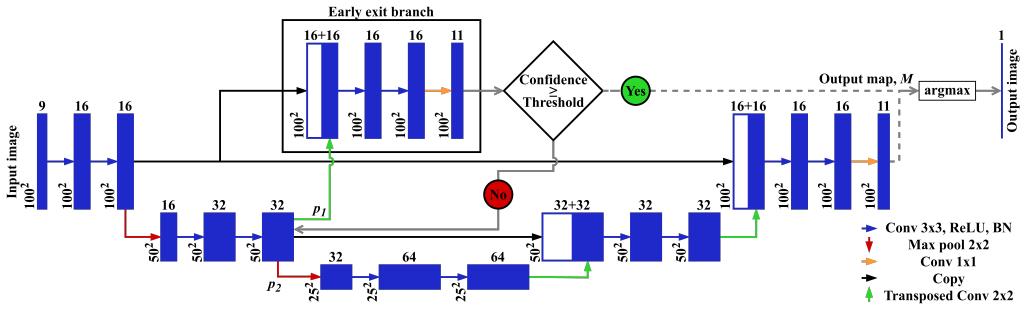
The early-exit branch that computes a compact confidence score from early layers and bypasses deeper layers when the score exceeds a tunable threshold.
If this is right
- Comparable IoU is preserved across a range of thresholds.
- Average multiplications drop by up to 42% under aggressive thresholds.
- Dynamic power consumption decreases in proportion to the multiplication savings.
- Choosing an extreme threshold trades some of the complexity reduction for higher IoU.
- The approach makes Tiny U-Net more practical for onboard UAV use in environmental monitoring.
Where Pith is reading between the lines
- Similar early-exit logic could be applied to other lightweight segmentation networks running on drones to extend flight time.
- The threshold-tuning trade-off between accuracy and speed may apply to additional sensor modalities or monitoring tasks beyond oil spills.
- On-device calibration of the confidence threshold could further adapt the model to varying flight conditions without retraining.
Load-bearing premise
A compact confidence score computed from early layers reliably indicates when skipping deeper layers will not materially degrade final IoU.
What would settle it
If hardware measurements on the target UAV platform show that the reported reduction in multiplications does not produce corresponding power savings or that IoU falls noticeably below the baseline at the chosen thresholds.
Figures
read the original abstract
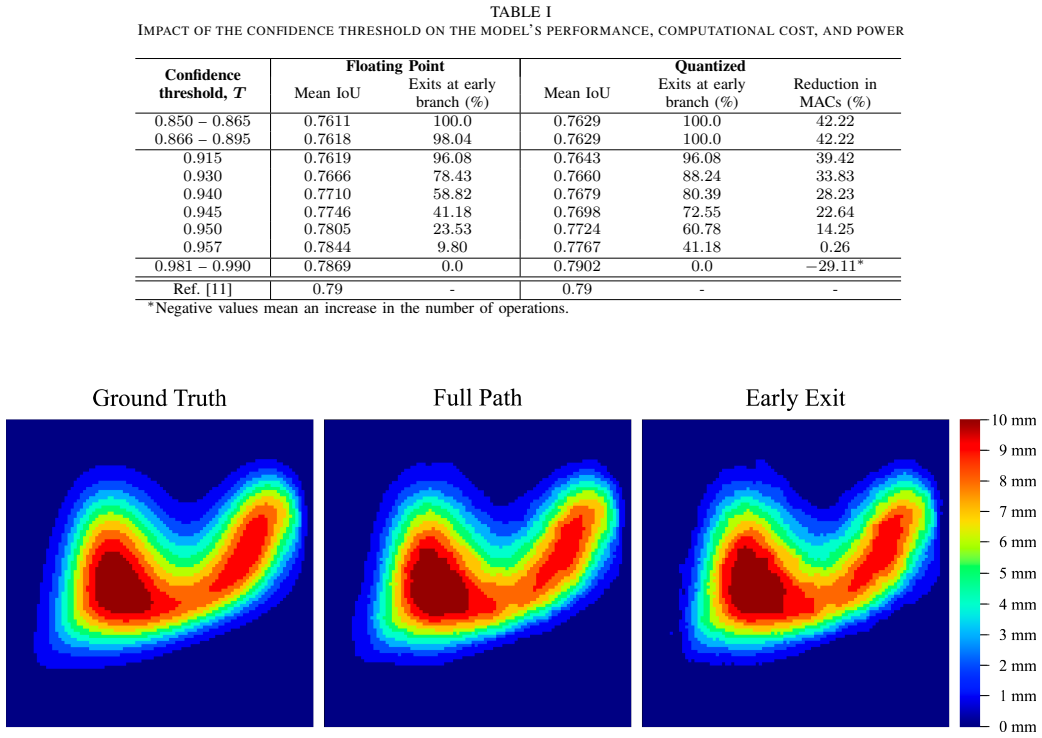
Oil spills represent a severe threat, making early-stage thickness estimation crucial for guiding remediation efforts. Unmanned Aerial Vehicles (UAVs) are an attractive platform for environmental monitoring. However, due to their limited computation and power budgets, real-time onboard processing requires optimized algorithms or lightweight machine learning models. While the standard U-Net architecture is often too large for constrained UAV hardware, the compressed Tiny U-Net variant fits on FPGA platforms and achieves competitive estimation performance (0.79 in the metric Intersection over Union, or IoU). Despite this success, Tiny U-Net processes every radar image through the complete inference pipeline, resulting in unnecessary computation for simple cases. To address this inefficiency, we integrate an early exit feature into the Tiny U-Net architecture. We introduce an early exit branch that returns an early prediction when a compact confidence score exceeds a tunable threshold, bypassing deeper layers for high-confidence evaluations. Our experiments demonstrate that this design achieves comparable IoU to the full baseline model. Crucially, the technique is shown to reduce the average number of multiplications by up to 42% for an aggressive threshold, reducing the dynamic power consumption. Choosing a threshold that ensures extreme confidence reduces the complexity-reduction gains for an improved IoU. This early exit approach substantially improves computational efficiency in Tiny U-Net, enabling more practical deployment in UAV-based environmental monitoring systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes integrating an early-exit branch into the Tiny U-Net architecture for onboard radar-image processing on UAVs, targeting oil-spill thickness estimation. The branch computes a compact confidence score from early layers and bypasses deeper layers when the score exceeds a tunable threshold. Experiments are reported to show that the resulting model maintains IoU comparable to the full Tiny U-Net baseline while reducing average multiplications by up to 42% at aggressive thresholds, with an explicit accuracy-efficiency trade-off at higher-confidence settings.
Significance. If the empirical results hold under proper validation, the work demonstrates a practical route to lowering dynamic power draw for semantic-segmentation tasks on severely resource-constrained UAV platforms. The 42% multiplication reduction directly addresses the power-budget bottleneck highlighted in the introduction and could enable longer flight times or higher frame rates in environmental-monitoring missions.
major comments (3)
- [Abstract] Abstract: the central claim that the early-exit design 'achieves comparable IoU' is stated without numerical values for either the baseline Tiny U-Net or the early-exit variant, nor any indication of the dataset size, number of test images, or cross-validation procedure. This omission leaves the quantitative support for the claim incomplete.
- [Abstract] Abstract and §4 (presumed experimental section): the threshold-selection procedure is not described. It is therefore impossible to determine whether the reported 42% multiplication reduction was obtained by post-hoc tuning on the test set or by a principled, held-out validation strategy.
- [Abstract] Abstract: no error bars, standard deviations, or number of independent runs accompany the reported IoU and multiplication-reduction figures. Without these, the statistical reliability of the accuracy-efficiency frontier cannot be assessed.
minor comments (2)
- [Abstract] The abstract refers to 'the metric Intersection over Union, or IoU' without specifying whether this is mean IoU across classes or per-class IoU for the oil-spill region; clarification would aid interpretation.
- [Abstract] The phrase 'compact confidence score' is introduced without a formula or architectural diagram showing how it is computed from the early-layer feature maps.
Simulated Author's Rebuttal
We thank the referee for their thorough review and valuable comments on our paper. We address each of the major comments below and will make the necessary revisions to the manuscript to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the early-exit design 'achieves comparable IoU' is stated without numerical values for either the baseline Tiny U-Net or the early-exit variant, nor any indication of the dataset size, number of test images, or cross-validation procedure. This omission leaves the quantitative support for the claim incomplete.
Authors: We agree that the abstract would benefit from more specific quantitative information. The baseline Tiny U-Net IoU of 0.79 is already mentioned, and our experiments demonstrate that the early-exit model achieves IoU scores that are comparable (within a small margin) across various thresholds. The evaluation was performed on a dataset of radar images for oil spill detection, using a standard train-validation-test split with cross-validation. We will revise the abstract to include the specific IoU values for the early-exit variants at the reported operating points, along with details on the dataset size, number of test images, and the cross-validation procedure. revision: yes
-
Referee: [Abstract] Abstract and §4 (presumed experimental section): the threshold-selection procedure is not described. It is therefore impossible to determine whether the reported 42% multiplication reduction was obtained by post-hoc tuning on the test set or by a principled, held-out validation strategy.
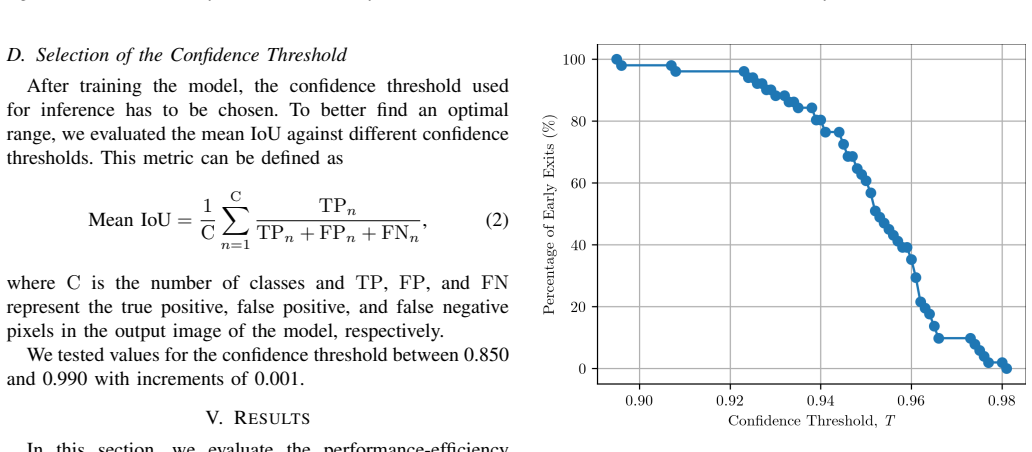
Authors: We apologize for the insufficient description in the abstract. The threshold is chosen to balance the confidence score with the desired efficiency-accuracy trade-off, and this selection is performed using a held-out validation set to avoid any leakage from the test data. The full procedure is outlined in Section 3, and the results in Section 4 are based on this validation-based selection. We will update the abstract to explicitly state that the threshold was determined via held-out validation and briefly summarize the approach. revision: yes
-
Referee: [Abstract] Abstract: no error bars, standard deviations, or number of independent runs accompany the reported IoU and multiplication-reduction figures. Without these, the statistical reliability of the accuracy-efficiency frontier cannot be assessed.
Authors: We acknowledge the importance of reporting statistical reliability. Our experimental results in Section 4 are based on multiple independent training and evaluation runs, and we provide mean values with standard deviations for the IoU and multiplication counts. We will revise the abstract to include these standard deviations or error bars for the key reported figures (such as the 42% reduction and the corresponding IoU) and specify the number of independent runs performed. revision: yes
Circularity Check
No significant circularity; empirical results only
full rationale
The paper describes an empirical engineering modification: adding early-exit branches to Tiny U-Net with a tunable confidence threshold, then measuring IoU and multiplication counts on radar images. All central claims (comparable IoU, up to 42% multiplication reduction) are direct experimental outcomes from test runs, not mathematical derivations, fitted parameters renamed as predictions, or self-citation chains. No equations, uniqueness theorems, or ansatzes are presented that could reduce to inputs by construction. The work is a self-contained case study whose validity rests on external benchmarks (IoU, power measurements) rather than internal redefinitions.
Axiom & Free-Parameter Ledger
free parameters (1)
- confidence threshold
axioms (1)
- domain assumption Early-layer confidence score correlates with final prediction correctness
Reference graph
Works this paper leans on
-
[1]
Eco- logical and economic costs of oil spills in Niger Delta, Nigeria,
Chukwuma Felix Ugwu, Kalu TU Ogba, and Chioma S Ugwu, “Eco- logical and economic costs of oil spills in Niger Delta, Nigeria,” in Economic Effects of Natural Disasters, pp. 439–455. Elsevier, 2021
work page 2021
-
[2]
The challenges of remotely measuring oil slick thick- ness,
Merv Fingas, “The challenges of remotely measuring oil slick thick- ness,”Remote Sensing, vol. 10, no. 2, p. 319, 2018
work page 2018
-
[3]
Zhengxin Zhang and Lixue Zhu, “A review on unmanned aerial vehi- cle remote sensing: Platforms, sensors, data processing methods, and applications,”Drones, vol. 7, no. 6, p. 398, 2023
work page 2023
-
[4]
A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles,
Zeyu Jiao, Guozhu Jia, and Yingjie Cai, “A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles,” Computers & Industrial Engineering, vol. 135, pp. 1300–1311, 2019
work page 2019
-
[5]
Oil spill detection using machine learning and infrared images,
Thomas De Kerf, Jona Gladines, Seppe Sels, and Steve Vanlanduit, “Oil spill detection using machine learning and infrared images,”Remote Sensing, vol. 12, no. 24, p. 4090, 2020
work page 2020
-
[6]
Zongchen Jiang, Jie Zhang, Yi Ma, and Xingpeng Mao, “Hyperspectral remote sensing detection of marine oil spills using an adaptive long-term moment estimation optimizer,”Remote Sensing, vol. 14, no. 1, p. 157, 2021
work page 2021
-
[7]
Bilal Hammoud, Charbel Bou Maroun, and Norbert Wehn, “Date on the edge: On-site oil spill detection and thickness estimation using drone- based radar backscattering,”IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2024
work page 2024
-
[8]
On-board drone classification with deep learning and system-on-chip implementation,
G. Di Cecio, A. Manco, and G. Gigante, “On-board drone classification with deep learning and system-on-chip implementation,” inJournal of Physics: Conference Series. IOP Publishing, 2024, vol. 2716, p. 012059
work page 2024
-
[9]
Hardware acceleration for real-time wildfire detection onboard drone networks,
Austin Alexander Briley and Fatemeh Afghah, “Hardware acceleration for real-time wildfire detection onboard drone networks,” inIEEE IN- FOCOM 2024 — Conference on Computer Communications Workshops (INFOCOM WKSHPS). IEEE, 2024, pp. 01–06
work page 2024
-
[10]
U-Net: Convolutional net- works for biomedical image segmentation,
O. Ronneberger, P. Fischer, and T. Brox, “U-Net: Convolutional net- works for biomedical image segmentation,” inProc. Int. Conf. Med. Image Comput. Comput.- Assist. Interv., 2015, pp. 234–241
work page 2015
- [11]
-
[12]
Haseena Rahmath P, Vishal Srivastava, Kuldeep Chaurasia, Roberto G. Pacheco, Rodrigo S. Couto, ”Early-exit deep neural network - a comprehensive survey,”ACM Comput. Surv., vol. 57, no. 3, Nov. 2024, Art. no. 75
work page 2024
-
[13]
Branchynet: Fast inference via early exiting from deep neural networks,
S. Teerapittayanon, B. McDanel, and H.-T. Kung, “Branchynet: Fast inference via early exiting from deep neural networks,” in2016 23rd international conference on pattern recognition (ICPR). IEEE, 2016, pp. 2464–2469
work page 2016
-
[14]
Bilal Hammoud, Kassem Jomaa, Fabien Ndagijimana, Ghaleb Faour, Hussam Ayad, and Jalal Jomaah, “Experimental validation of algorithms used by radar remote-sensing systems for oil-spill detection and thick- ness estimation,” in2019 16th European Radar Conference (EuRAD). IEEE, 2019, pp. 205–208
work page 2019
-
[15]
Hammoud, B. and Wehn, N. ”Recent advances in oil-spill monitoring using drone-based radar remote sensing”. Marine Pollution-Recent De- velopments, 2022
work page 2022
-
[16]
Hammoud B, Daou G, Wehn N. ”Multidimensional Minimum Euclidean Distance Approach Using Radar Reflectivities for Oil Slick Thickness Estimation”. Sensors. 2022; 22(4):1431
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.