Rainbow Separating Path Systems
Pith reviewed 2026-05-10 08:10 UTC · model grok-4.3
The pith
Rainbow separating path systems in graphs fall into one of three asymptotic size classes as colors increase.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
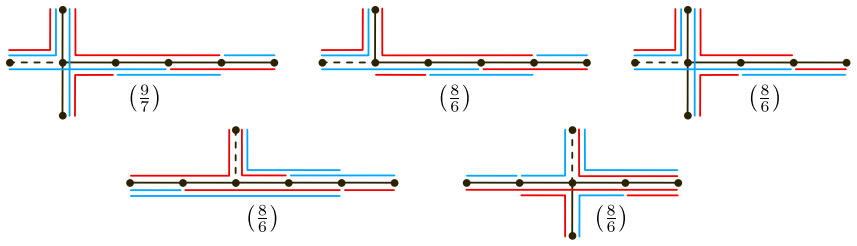
We introduce a colorful version of separating path systems in which two edges can only be separated from each other by two paths of distinct colors. We calculate the minimum sizes of such systems for various standard classes of graphs and numbers of colors. With respect to this setup, we identify three possible asymptotic behaviors for a class of graphs as the number of colors goes to infinity, and we find a wide range of examples that display each of these behaviors.
What carries the argument
Rainbow separating path system (collection of colored paths such that every edge pair is separated by two paths of distinct colors), used to compute exact minima and classify their growth with more colors.
If this is right
- Some graph classes admit a bounded minimum size independent of the number of colors.
- Other graph classes require a minimum size that grows linearly with the number of colors.
- A third collection of graph classes exhibits a distinct intermediate growth rate for the minimum size.
- The three regimes are realized by wide ranges of concrete graph examples.
Where Pith is reading between the lines
- The trichotomy may reflect underlying graph parameters such as maximum degree or connectivity that limit how colors can be reused for separation.
- The same separation concept could apply to directed graphs or hypergraphs to study multicolored distinguishing codes.
- Optimal construction algorithms might be designed by first classifying a graph into one of the three asymptotic types.
Load-bearing premise
The minimum sizes are exactly determined for the listed standard graph classes and the three asymptotic behaviors are exhaustive and distinct for the families considered.
What would settle it
A graph family whose minimum rainbow separating path system size grows at a rate, such as logarithmically, that matches none of the three behaviors identified.
Figures

















read the original abstract
We introduce a colorful version of separating path systems, in which two edges can only be separated from each other by two paths of distinct colors. We calculate the minimum sizes of such systems for various standard classes of graphs and numbers of colors. With respect to this setup, we identify three possible asymptotic behaviors for a class of graphs as the number of colors goes to infinity, and we find a wide range of examples that display each of these behaviors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces rainbow separating path systems, a variant of separating path systems in which any two edges must be separated by a pair of paths that receive distinct colors. It computes the exact minimum size of such a system for a number of standard graph families (paths, cycles, complete graphs, trees, etc.) as a function of the number of colors k. It then classifies the asymptotic growth of these minima as k tends to infinity into three distinct regimes and supplies explicit constructions realizing each regime for infinite families of graphs.
Significance. The explicit minimum-size formulas and the three-regime classification constitute concrete, verifiable combinatorial results that extend the literature on separating systems. The provision of both exact calculations for fixed k and matching constructions for the asymptotic regimes is a strength, as these statements are in principle checkable by direct counting and construction. If correct, the work supplies benchmark values and a coarse structural taxonomy that may be useful for further extremal questions in colored graph theory.
major comments (2)
- [§3] §3 (or the section containing the calculations for complete graphs): the claimed minimum size for K_n with k colors appears to rely on a lower-bound argument that counts the number of edge pairs and the separating capacity of a single rainbow path; this bound is tight only if every pair of edges can be separated by a unique pair of paths, but the manuscript does not exhibit an explicit matching upper-bound construction for general n and k. A concrete example for n=5, k=3 would clarify whether the formula is achieved.
- [§4] §4, the paragraph defining the three asymptotic regimes: the statement that the regimes are 'distinct' is supported by the supplied families, yet the manuscript does not rule out the possibility that some graph families exhibit growth rates strictly between the identified regimes (e.g., Θ(log k / log log k)). Clarifying whether the three regimes are claimed to be exhaustive for all graphs or merely the ones realized by the examples would strengthen the classification claim.
minor comments (3)
- [§2] The notation for the minimum size function (presumably denoted something like rsp(G,k)) is introduced without an explicit global definition; adding a single displayed equation in §2 would improve readability.
- [Table 1] Table 1 (or the summary table of exact values) lists results for paths and cycles but omits the corresponding asymptotic regime for each row; adding a column would make the connection to §4 immediate.
- [Introduction] A few citations to the classical (non-rainbow) separating-path-system literature are present but could be expanded to include the most recent surveys on separating systems.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and the recommendation of minor revision. We address each major comment below and will incorporate the suggested clarifications and example into the revised manuscript.
read point-by-point responses
-
Referee: [§3] §3 (or the section containing the calculations for complete graphs): the claimed minimum size for K_n with k colors appears to rely on a lower-bound argument that counts the number of edge pairs and the separating capacity of a single rainbow path; this bound is tight only if every pair of edges can be separated by a unique pair of paths, but the manuscript does not exhibit an explicit matching upper-bound construction for general n and k. A concrete example for n=5, k=3 would clarify whether the formula is achieved.
Authors: We appreciate the referee highlighting this point. The lower bound follows from a standard double-counting argument on the pairs of edges that must be separated and the limited number of distinct-color path pairs each rainbow path can provide. The manuscript does supply matching upper-bound constructions for K_n by exhibiting an explicit collection of paths together with a k-edge-coloring that realizes the bound; these are described in the section on complete graphs. To improve readability and directly address the request, we will expand the presentation of the general construction and add the concrete small case n=5, k=3 (where the minimum size is achieved by four suitably colored paths) in the revision. revision: yes
-
Referee: [§4] §4, the paragraph defining the three asymptotic regimes: the statement that the regimes are 'distinct' is supported by the supplied families, yet the manuscript does not rule out the possibility that some graph families exhibit growth rates strictly between the identified regimes (e.g., Θ(log k / log log k)). Clarifying whether the three regimes are claimed to be exhaustive for all graphs or merely the ones realized by the examples would strengthen the classification claim.
Authors: The three regimes are introduced as the distinct asymptotic behaviors realized by the infinite families of graphs for which we give explicit constructions and exact formulas. The manuscript does not assert that these regimes are exhaustive over all possible graphs, nor does it claim to have ruled out intermediate growth rates. We will revise the paragraph to state explicitly that the classification concerns the families examined in the paper and that other rates remain possible for graphs outside these families. This is a minor wording clarification. revision: yes
Circularity Check
No circularity: direct combinatorial calculations and constructions
full rationale
The paper defines a new object (rainbow separating path systems) and computes its minimum sizes on standard graph families by explicit counting and construction. The three asymptotic regimes are realized by exhibiting concrete families whose growth rates differ measurably as the number of colors tends to infinity. No equations, fitted parameters, or self-citations appear in the abstract or description that would reduce any claimed result to an input by construction. All load-bearing steps are ordinary, externally verifiable combinatorial statements.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard definitions of graphs, paths, and edge coloring from graph theory.
Reference graph
Works this paper leans on
-
[1]
Francisco Arrepol, Patricio Asenjo, Ra´ ul Astete, Victor Cartes, Anah´ ı Gajardo, Valeria Henr´ ıquez, Catalina Opazo, Nicol´ as Sanhueza-Matamala, and Christopher Thraves Caro,Separating path systems in trees, Journal of Opti- mization Theory and Applications208(2026), no. 2, 70
work page 2026
-
[2]
Martin, and Andr´ as Pluh´ ar,On the path separation number of graphs, Discrete Appl
J´ ozsef Balogh, B´ ela Csaba, Ryan R. Martin, and Andr´ as Pluh´ ar,On the path separation number of graphs, Discrete Appl. Math.213(2016), 26–33
work page 2016
-
[3]
Ahmad Biniaz, Prosenjit Bose, Jean-Lou De Carufel, Anil Maheshwari, Babak Miraftab, Saeed Odak, Michiel Smid, Shakhar Smorodinsky, and Yelena Yuditsky,On separating path and tree systems in graphs, Discrete Math. Theor. Comput. Sci.27(2025), no. 2
work page 2025
-
[4]
Marthe Bonamy, F´ abio Botler, Fran¸ cois Dross, T´ assio Naia, and Jozef Skokan,Separating the edges of a graph by a linear number of paths, Adv. Comb. (2023)
work page 2023
-
[5]
F´ abio Botler and T´ assio Naia,Separating the edges of a graph by cycles and by subdivisions ofK 4, J. Graph Theory110(2025), no. 1, 41–47
work page 2025
-
[6]
Narayanan,Sepa- rating path systems, J
Victor Falgas-Ravry, Teeradej Kittipassorn, Daniel Kor´ andi, Shoham Letzter, and Bhargav P. Narayanan,Sepa- rating path systems, J. Comb.5(2014), no. 3, 335–354
work page 2014
-
[7]
Cristina G Fernandes, Guilherme Oliveira Mota, and Nicol´ as Sanhueza-Matamala,Separating path systems in complete graphs, Random Struct. Algorithms66(2025), no. 3, e70006
work page 2025
- [8]
-
[9]
31 A On the lower bound of Theorem 2.5 The lower bound in Theorem 2.5 is not always tight
Lyuben Lichev and Nicol´ as Sanhueza-Matamala,Vertex-separating path systems in random graphs, 2024.https: //arxiv.org/abs/2408.01816. 31 A On the lower bound of Theorem 2.5 The lower bound in Theorem 2.5 is not always tight. Becausec2(Sn,q)≥c 2(Sn−1,q)+1, the lower bound is only tight if every edge added in the process of extendingS 2q+1,q toS n,q increa...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.