Optimal Planning and Control under Signal Temporal Logic Specifications
Pith reviewed 2026-05-08 02:10 UTC · model grok-4.3
The pith
Decomposing STL specifications into local tasks enables sampling-based waypoint synthesis and safe-corridor optimization for nonlinear system trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
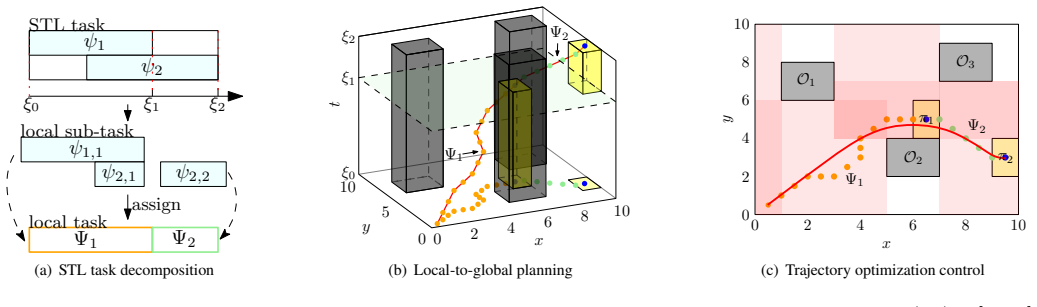
By decomposing STL tasks into local ones, generating and synthesizing waypoint sequences, constructing safe corridors, and solving an optimization problem with satisfaction pair sets, a position trajectory is obtained that satisfies the STL specification for nonlinear systems.
What carries the argument
The safe corridor around the synthesized global waypoint sequence together with the satisfaction pair sets from local tasks, which constrain the optimization problem to produce an STL-satisfying trajectory.
If this is right
- Nonlinear systems can generate trajectories meeting complex temporal logic constraints through this local decomposition and optimization.
- The method produces both collision-free paths and task-compliant behaviors in a single optimization step.
- Comparative evaluations confirm the approach works on example systems where direct STL handling is intractable.
Where Pith is reading between the lines
- If the local decomposition scales to dynamic or uncertain environments, the corridor could be recomputed online for reactive control.
- The technique might reduce the conservatism of STL-based planners by leveraging sampling only where needed.
- Success would imply that many STL control problems reduce to standard nonlinear programming once a feasible global skeleton exists.
Load-bearing premise
Any STL specification admits a decomposition into finitely many local tasks whose waypoint sequences can be combined into a single global path that preserves satisfaction of the original specification.
What would settle it
Finding an STL specification for which no such finite local decomposition and global synthesis exists without violating the spec, or showing that the resulting optimization has no feasible solution for a satisfiable task.
Figures




read the original abstract
This paper addresses the planning and control problem for nonlinear systems under Signal Temporal Logic (STL) specifications. We first decompose an STL task into finite local tasks. A sampling-based method generates sequences of local waypoints to satisfy all local tasks, from which the corresponding satisfaction pair sets are derived. Following a local-to-global strategy, all sequences of local waypoints are synthesized into a global one, based on which a safe corridor is then constructed. Leveraging the safe corridor and the satisfaction pair sets, an optimization problem is formulated and solved to derive a position trajectory that satisfies the STL task. Finally, numerical examples and comparative results are presented to demonstrate the efficacy of the proposed approach.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses planning and control for nonlinear systems under STL specifications. It decomposes any STL task into a finite set of local tasks, uses a sampling-based method to generate waypoint sequences satisfying each local task and derives corresponding satisfaction pair sets, synthesizes the local sequences into a single global waypoint sequence, constructs a safe corridor around it, and formulates an optimization problem whose solution yields a position trajectory claimed to satisfy the original STL specification. Numerical examples and comparisons are mentioned to illustrate the approach.
Significance. If the local-to-global synthesis and subsequent optimization provably preserve STL satisfaction for arbitrary formulas (including nested operators), the method would provide a practical bridge between sampling-based planning and continuous optimization for STL-constrained nonlinear control, potentially reducing conservatism compared to purely abstraction-based or MILP encodings while scaling to longer horizons.
major comments (2)
- [Abstract / Proposed Method] Abstract (decomposition step): the claim that any STL formula can be decomposed into finite independent local tasks whose waypoint sequences can be synthesized without violating the original semantics is load-bearing but unsupported by any argument or counter-example analysis in the provided description. For nested operators such as □(◇A U B) or ◇(A ∧ □B), local satisfaction plus corridor constraints may not imply global satisfaction; a formal preservation proof or explicit handling of temporal dependencies is required.
- [Abstract / Optimization Formulation] Abstract (optimization step): the formulation that leverages the safe corridor and satisfaction pair sets to produce a trajectory satisfying the STL task supplies no derivation, no statement of the cost or constraints, and no proof that the optimizer preserves the specification. Without these, the central claim that the resulting trajectory satisfies the original STL formula cannot be evaluated.
minor comments (2)
- [Abstract] The abstract states that 'numerical examples and comparative results are presented' but provides no metrics, baselines, or quantitative measures of STL robustness or computational time; these should be summarized with specific numbers and tables.
- [Method Description] Notation for satisfaction pair sets and the precise definition of the safe corridor are introduced without reference to prior work or explicit equations; adding these would improve readability.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed comments. We address each major comment below and have revised the manuscript to strengthen the presentation of the decomposition and optimization steps.
read point-by-point responses
-
Referee: [Abstract / Proposed Method] Abstract (decomposition step): the claim that any STL formula can be decomposed into finite independent local tasks whose waypoint sequences can be synthesized without violating the original semantics is load-bearing but unsupported by any argument or counter-example analysis in the provided description. For nested operators such as □(◇A U B) or ◇(A ∧ □B), local satisfaction plus corridor constraints may not imply global satisfaction; a formal preservation proof or explicit handling of temporal dependencies is required.
Authors: We agree the abstract provides only a high-level overview and does not contain the supporting argument. Section III of the manuscript defines the decomposition via the STL syntax tree, where each local task corresponds to a subformula and satisfaction pair sets record the time intervals required by each predicate. The local-to-global synthesis step enforces ordering and timing consistency across these pairs, which is intended to preserve semantics for nested operators. To directly address the concern, we will add a new Lemma in Section III that formally proves satisfaction preservation for arbitrary STL formulas (including nested temporal operators) and include a short discussion with the suggested nested-operator examples to illustrate how temporal dependencies are maintained. revision: yes
-
Referee: [Abstract / Optimization Formulation] Abstract (optimization step): the formulation that leverages the safe corridor and satisfaction pair sets to produce a trajectory satisfying the STL task supplies no derivation, no statement of the cost or constraints, and no proof that the optimizer preserves the specification. Without these, the central claim that the resulting trajectory satisfies the original STL formula cannot be evaluated.
Authors: The abstract is intentionally concise; the full derivation appears in Section IV. The optimization minimizes a quadratic cost penalizing control effort and deviation from the reference waypoint sequence, subject to (i) linear inequalities defining the safe corridor around the global waypoint sequence and (ii) additional linear constraints extracted from the satisfaction pair sets that enforce predicate satisfaction at the required times. Theorem 2 in the manuscript proves that any feasible solution satisfies the original STL formula. We will expand the abstract with a one-sentence description of the cost and constraints and add an explicit forward reference to Theorem 2. revision: yes
Circularity Check
No circularity: algorithmic decomposition and synthesis steps are independent of fitted inputs
full rationale
The paper presents a constructive algorithm: decompose STL into local tasks, generate waypoint sequences by sampling, synthesize globally, build safe corridor, then solve an optimization using satisfaction pairs. No equations or steps reduce by construction to fitted parameters, self-citations, or renamed inputs; the chain relies on external sampling and optimization primitives without self-referential definitions. This is the common case of a self-contained planning procedure.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Andersson, J.A., Gillis, J., Horn, G., Rawlings, J.B., and Diehl, M. (2019). CasADi: A software framework for nonlinear optimization and optimal control.Math. Program. Comput., 11, 1–36. Baier, C. and Katoen, J.P. (2008).Principles of Model Checking. MIT Press. Belta, C., Bicchi, A., Egerstedt, M., Frazzoli, E., Klavins, E., and Pappas, G.J. (2007). Symbo...
2019
-
[2]
Karlsson, J., Barbosa, F.S., and Tumova, J
IEEE. Karlsson, J., Barbosa, F.S., and Tumova, J. (2020). Sampling- based motion planning with temporal logic missions and spatial preferences.IFAC-PapersOnLine, 53, 15537–15543. Lee, T.C., Song, K.T., Lee, C.H., and Teng, C.C. (2001). Tracking control of unicycle-modeled mobile robots using a saturation feedback controller.IEEE Trans. Control Syst. Techn...
-
[3]
Linard, A., Torre, I., Bartoli, E., Sleat, A., Leite, I., and Tumova, J. (2023). Real-time RRT* with signal temporal logic preferences. InIEEE/RSJ Int. Conf. Intell. Robots Syst., 8621–8627. IEEE. Lindemann, L. and Dimarogonas, D.V. (2019). Control barrier functions for multi-agent systems under conflicting local signal temporal logic tasks.IEEE Control S...
2023
-
[4]
and Nickovic, D
Maler, O. and Nickovic, D. (2004). Monitoring temporal properties of continuous signals. InInternational Symposium on Formal Techniques in Real-Time and Fault-Tolerant Systems, 152–166. Springer. Park, J., Kim, J., Jang, I., and Kim, H.J. (2020). Efficient multi- agent trajectory planning with feasibility guarantee using relative bernstein polynomial. InI...
2004
-
[5]
Sun, D., Chen, J., Mitra, S., and Fan, C. (2022). Multi-agent motion planning from signal temporal logic specifications. IEEE Robot. Autom. Lett., 7, 3451–3458. Tan, L., Ren, W., and Xiong, J. (2024). Decomposition-based chance-constrained control for timed reach-avoid tasks.IEEE Control Syst. Lett., 8, 2961–2966. Urmson, C. and Simmons, R. (2003). Approa...
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.