Behaviour-aware Hybrid Architecture for Trust-driven Transmissions
Pith reviewed 2026-05-07 15:32 UTC · model grok-4.3
The pith
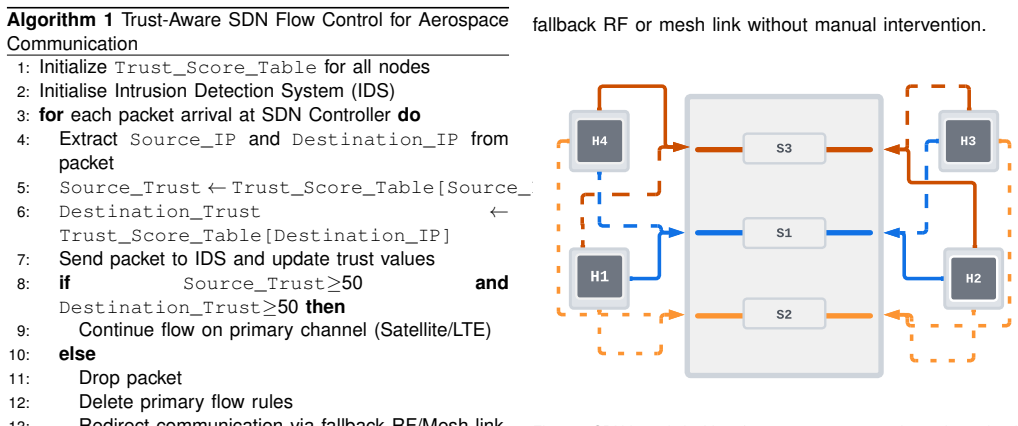
A trust-aware SDN controller uses real-time intrusion detection to switch traffic to a backup channel in under 5 milliseconds when primary link trust drops.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that a behaviour-aware hybrid SDN architecture integrates a high-bandwidth primary link with a low-power fallback channel under zero-trust routing policies enforced by an SDN controller; a real-time IDS updates node trust scores and triggers autonomous channel switching when trust or reliability degrades, yielding sub-5 ms failover latency, efficient flow installation, and lower packet loss than conventional single-channel or static routing in Mininet simulations.
What carries the argument
The SDN controller that monitors IDS-generated trust scores to enforce zero-trust routing and autonomously switch between primary and fallback heterogeneous channels.
If this is right
- Maintains uninterrupted connectivity for mission-critical aerospace operations despite link degradation.
- Enables scalable resilient communication across distributed UAV, satellite, and ground assets.
- Improves cyber defence by isolating compromised nodes through trust-based rerouting.
- Supports autonomous coordination with efficient flow installation and minimal disruption.
Where Pith is reading between the lines
- The same trust-driven switching logic could apply to ground-based autonomous vehicle fleets facing similar interference.
- Hardware-in-the-loop testing would be needed to check whether controller overhead scales with larger node counts.
- Adding predictive models for trust decay might allow preemptive switching before full degradation occurs.
Load-bearing premise
The Mininet simulation environment accurately models the dynamics of real contested aerospace settings that include jamming, interference, and cyberattacks on heterogeneous UAV, satellite, and ground links.
What would settle it
A real-world testbed deployment in a contested aerospace environment with actual jamming and cyberattacks that measures whether failover latency stays below 5 ms and packet loss remains lower than in single-channel systems.
Figures
read the original abstract
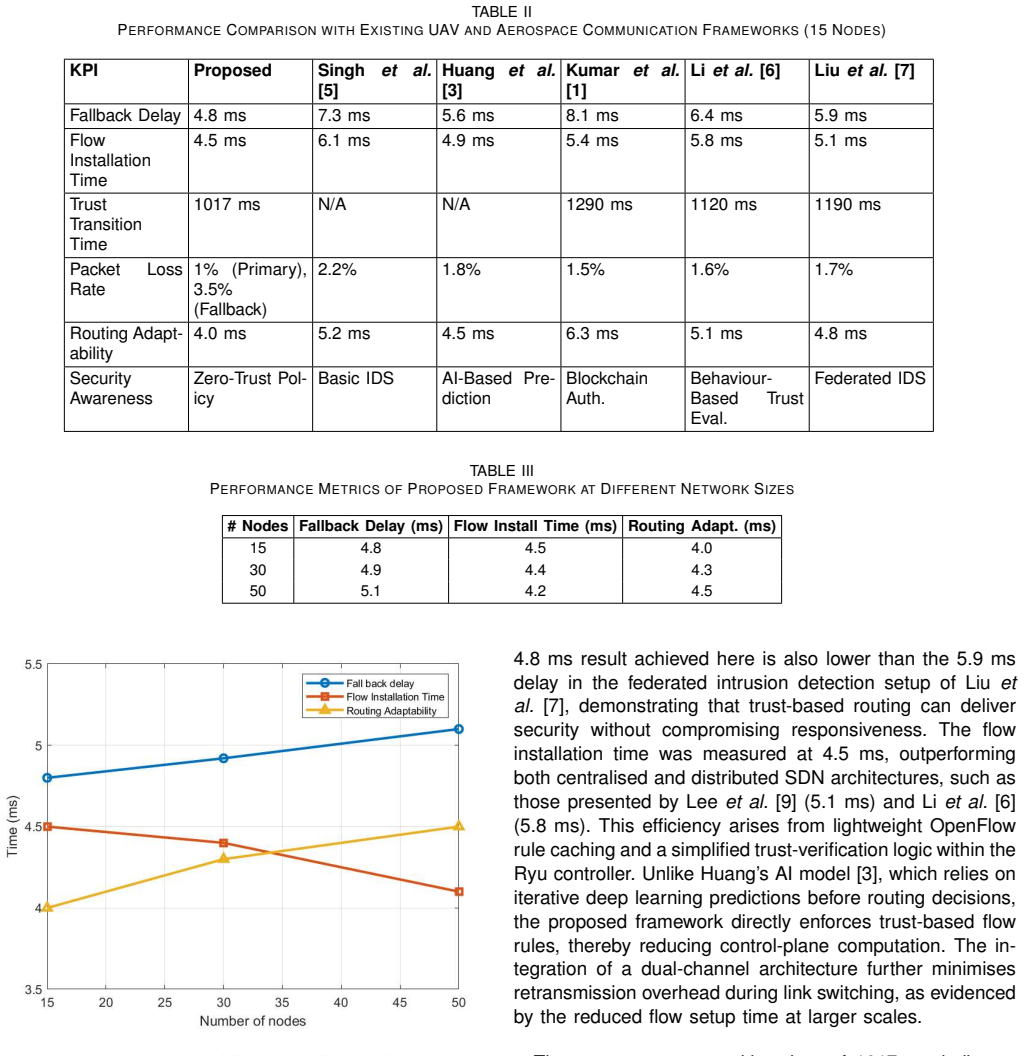
Reliable and secure communication is essential for mission-critical aerospace and defence operations involving autonomous platforms such as Unmanned Aerial Vehicles (UAVs), satellites, and ground control systems. In contested or dynamic environments, communication links are frequently exposed to jamming, interference, and cyberattacks, making network resilience a key operational requirement. This paper presents a trust-aware Software-Defined Networking (SDN) framework that enables secure, low-latency failover between heterogeneous communication channels. The proposed architecture integrates a high-bandwidth primary link (e.g., satellite or tactical LTE) with a low-power fallback channel (e.g., RF or mesh), managed by an SDN controller that enforces zero-trust routing policies. A real-time Intrusion Detection System (IDS) continuously updates node trust scores; when trust or link reliability degrades, the controller autonomously switches traffic to the secondary channel, ensuring uninterrupted connectivity. Simulation results in a Mininet-based test environment demonstrate sub-5 ms failover latency, efficient flow installation, and significant reduction in packet loss compared with conventional single-channel or static routing systems. The proposed framework provides a scalable and resilient communication backbone for next-generation aerospace networks, enhancing mission reliability, cyber defence, and autonomous coordination across distributed aerial and space assets.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a behaviour-aware hybrid SDN architecture for trust-driven transmissions in aerospace networks involving UAVs, satellites, and ground systems. It integrates a high-bandwidth primary channel with a low-power fallback channel under zero-trust routing enforced by an SDN controller. Real-time trust scores from an IDS trigger autonomous failover when link reliability degrades. The central claim, supported by Mininet simulations, is that the framework achieves sub-5 ms failover latency, efficient flow installation, and reduced packet loss relative to single-channel or static routing baselines.
Significance. If the performance claims can be substantiated under realistic physical-layer conditions, the architecture would represent a useful integration of SDN, IDS-driven trust, and hybrid-channel failover for mission-critical aerospace communications. The approach aligns with zero-trust principles and could improve resilience against jamming and cyberattacks. However, the current evaluation does not yet establish this applicability.
major comments (1)
- [Abstract and Simulation Results] Abstract and Simulation Results section: the central performance claims (sub-5 ms failover latency, efficient flow installation, and packet-loss reduction) rest on Mininet-based simulations, yet standard Mininet emulates only logical topology and forwarding decisions. It lacks native support for RF propagation, jamming-induced errors, satellite latency variation, UAV mobility effects on link quality, or heterogeneous link dynamics required by the contested aerospace scenario outlined in the introduction. Without documented extensions (e.g., Mininet-WiFi, custom channel models, or error-rate injection) or explicit limitations stated, the measured latencies and loss reductions cannot be shown to survive the jamming, interference, and attack conditions the architecture is intended to address.
minor comments (2)
- [Abstract] The abstract supplies no details on simulation parameters, baseline configurations, statistical tests, number of runs, or how jamming/attack models were implemented; these should be added to the evaluation section for reproducibility.
- [Architecture Description] Notation for trust-score updates and link-reliability metrics could be formalized with explicit equations or pseudocode in the architecture description to clarify how IDS outputs map to routing decisions.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address the concern about the simulation environment point by point below.
read point-by-point responses
-
Referee: [Abstract and Simulation Results] Abstract and Simulation Results section: the central performance claims (sub-5 ms failover latency, efficient flow installation, and packet-loss reduction) rest on Mininet-based simulations, yet standard Mininet emulates only logical topology and forwarding decisions. It lacks native support for RF propagation, jamming-induced errors, satellite latency variation, UAV mobility effects on link quality, or heterogeneous link dynamics required by the contested aerospace scenario outlined in the introduction. Without documented extensions (e.g., Mininet-WiFi, custom channel models, or error-rate injection) or explicit limitations stated, the measured latencies and loss reductions cannot be shown to survive the jamming, interference, and attack conditions the architecture is intended to address.
Authors: We agree that standard Mininet emulates logical topology and forwarding without native physical-layer support for RF propagation, jamming, satellite latency, or UAV mobility. Our simulations evaluate the SDN control-plane behavior: flow installation times and autonomous failover triggered by IDS-provided trust scores. These trust scores are treated as real-time inputs that would incorporate physical-layer and security metrics in a full deployment. The evaluation therefore demonstrates logical-network performance under the assumption that the IDS supplies accurate trust updates reflecting link conditions. We acknowledge that the current setup does not model the physical effects directly and that the reported metrics (sub-5 ms failover, packet-loss reduction) are scoped to this logical emulation. In the revised version we will add explicit statements of these simulation assumptions and limitations in the Simulation Results section and abstract, and we will include a brief discussion of future extensions using Mininet-WiFi or custom error-injection models to address contested aerospace conditions. revision: yes
Circularity Check
No circularity: empirical simulation results independent of fitted inputs or self-citations
full rationale
The paper presents a trust-aware SDN architecture integrating IDS-updated trust scores for channel failover in aerospace scenarios, with performance claims resting solely on Mininet simulation outputs (sub-5 ms latency, reduced packet loss). No equations, derivations, or 'predictions' are described that reduce by construction to parameters fitted from the same data or to self-cited uniqueness theorems. Standard SDN and trust concepts are invoked without self-definitional loops or ansatz smuggling. The simulation results are presented as direct empirical measurements rather than tautological outputs, keeping the derivation chain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Mininet simulation accurately captures the timing and packet-loss behavior of real UAV, satellite, and mesh links under jamming and cyberattacks.
Reference graph
Works this paper leans on
-
[1]
Secure and intelligent communication for autonomous uav systems using software defined networking,
P . Kumar, R. Kumar, A. Jolfaei, and A. K. M. N. Islam, “Secure and intelligent communication for autonomous uav systems using software defined networking,”IEEE T ransactions on Aerospace and Electronic Systems, vol. 59, no. 6, pp. 10 432–10 445, 2023
work page 2023
-
[2]
Software-defined net- working for air–ground integrated networks: A comprehensive survey,
R. Chaudhary, S. Misra, and M. Reisslein, “Software-defined net- working for air–ground integrated networks: A comprehensive survey,” IEEE Communications Surveys & T utorials, vol. 24, no. 3, pp. 1718– 1755, 2022
work page 2022
-
[3]
Ai-driven adaptive routing for resilient aerospace communication networks,
Y . Huang, Z. Sun, and D. Wang, “Ai-driven adaptive routing for resilient aerospace communication networks,”IEEE Access, vol. 12, pp. 48 765–48 778, 2024
work page 2024
-
[4]
Cyber-physical resilience in uav swarm communication under jamming and intrusion,
X. Zhang, M. Qiu, and L. Y ang, “Cyber-physical resilience in uav swarm communication under jamming and intrusion,”IEEE T rans- actions on Intelligent T ransportation Systems, vol. 24, no. 10, pp. 12 213–12 225, 2023
work page 2023
-
[5]
Multi-link adaptive routing for heteroge- neous airborne networks using sdn,
S. Singh and N. Saxena, “Multi-link adaptive routing for heteroge- neous airborne networks using sdn,”IEEE Systems Journal, vol. 15, no. 4, pp. 5230–5240, 2021
work page 2021
-
[6]
Zero-trust communication architecture for autonomous defense networks,
J. Li, H. Chen, and P . Jiang, “Zero-trust communication architecture for autonomous defense networks,”IEEE T ransactions on Network and Service Management, vol. 19, no. 4, pp. 8581–8595, 2025
work page 2025
-
[7]
Federated intrusion detection for uav swarm communication networks,
Y . Liu, H. Zhao, and F . Wang, “Federated intrusion detection for uav swarm communication networks,”IEEE Internet of Things Journal, vol. 12, no. 3, pp. 2201–2214, 2025
work page 2025
-
[8]
Blockchain-assisted secure communi- cation scheduling for uav networks,
Q. Peng, X. Luo, and C. Xu, “Blockchain-assisted secure communi- cation scheduling for uav networks,”IEEE T ransactions on Vehicular T echnology, vol. 73, no. 4, pp. 5120–5134, 2024
work page 2024
-
[9]
Distributed sdn controller for real-time uav networks,
J. Lee, D. Park, and T. Kim, “Distributed sdn controller for real-time uav networks,”IEEE T ransactions on Network and Service Management, vol. 20, no. 2, pp. 2761–2774, 2023
work page 2023
-
[10]
Lightweight trust evaluation for uav ad hoc networks using fuzzy-bayesian reasoning,
L. Wu, R. Zhang, and P . Chen, “Lightweight trust evaluation for uav ad hoc networks using fuzzy-bayesian reasoning,”IEEE Access, vol. 10, pp. 127 112–127 125, 2022
work page 2022
-
[11]
Swarm intelligence-based controller placement in space–ground sdn architectures,
S. Alizadeh, M. H. Karim, and L. Wang, “Swarm intelligence-based controller placement in space–ground sdn architectures,”IEEE Ac- cess, vol. 12, pp. 62 391–62 405, 2024
work page 2024
-
[12]
Neural-enhanced fault recovery frame- work for multi-hop uav networks,
J. Feng, R. Li, and T. Zhang, “Neural-enhanced fault recovery frame- work for multi-hop uav networks,”IEEE Internet of Things Journal, vol. 10, no. 12, pp. 10 483–10 495, 2023
work page 2023
-
[13]
Metaheuristic-optimized trust routing in large-scale uav mesh networks,
Z. Zhang, B. Li, and W. Gao, “Metaheuristic-optimized trust routing in large-scale uav mesh networks,”IEEE T ransactions on Intelligent T ransportation Systems, vol. 23, no. 11, pp. 20 645–20 656, 2022
work page 2022
-
[14]
Quantum-secure software-defined networking for uav communications,
A. Patel, M. Singh, and R. Joshi, “Quantum-secure software-defined networking for uav communications,”IEEE T ransactions on Aerospace and Electronic Systems, vol. 61, no. 1, pp. 112–123, 2025
work page 2025
-
[15]
Cross-domain sdn control for integrated space–air–ground networks,
H. Zhao, N. Gupta, and S. Li, “Cross-domain sdn control for integrated space–air–ground networks,”IEEE Communications Letters, vol. 27, no. 6, pp. 1451–1455, 2023
work page 2023
-
[16]
Ai-based congestion control in inte- grated space–air–ground networks,
K. Gao, Y . Zhou, and T. Huang, “Ai-based congestion control in inte- grated space–air–ground networks,”IEEE T ransactions on Vehicular T echnology, vol. 73, no. 9, pp. 11 083–11 096, 2024
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.