Real-Time Minimum-Energy Operating-Point Tracking for Battery-Powered Micro DC Motors Under Dynamically Variable Loading
Pith reviewed 2026-05-07 12:42 UTC · model grok-4.3
The pith
Micro DC motors reach minimum energy per cycle at a load-dependent voltage that can be tracked in real time from current features.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
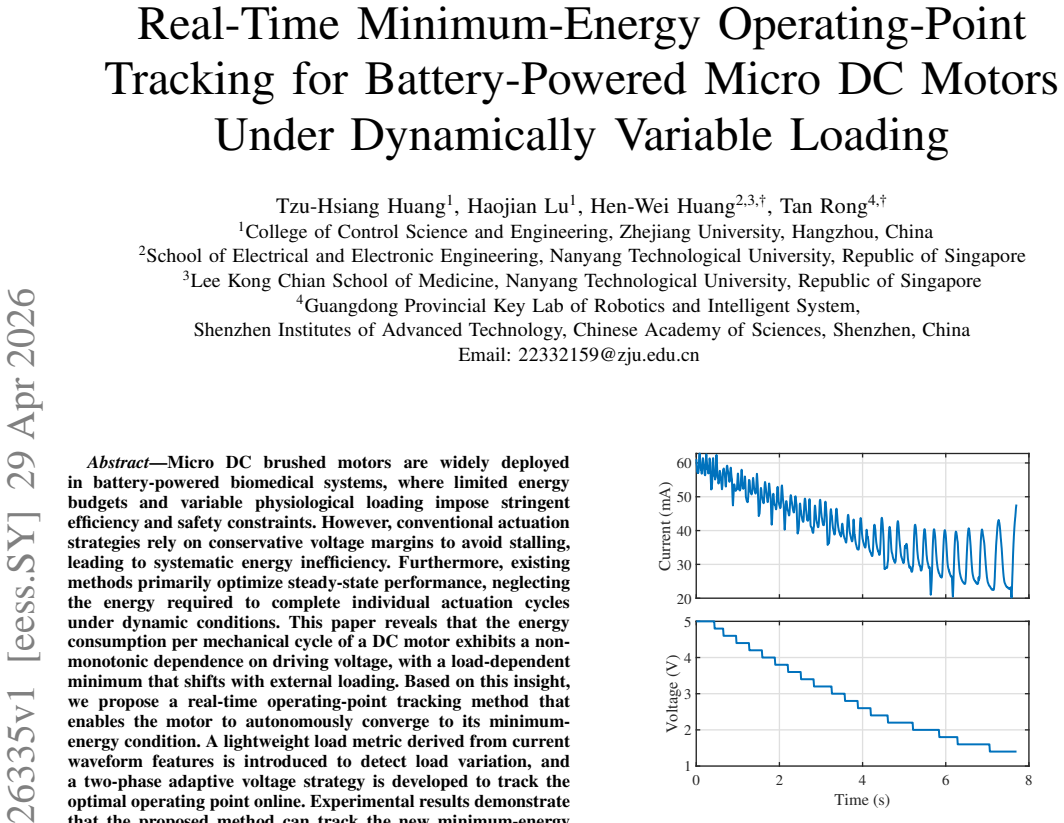
The energy consumption per mechanical cycle of a DC motor exhibits a non-monotonic dependence on driving voltage, with a load-dependent minimum that shifts with external loading. A lightweight load metric derived from current waveform features detects these shifts, and a two-phase adaptive voltage strategy enables the motor to converge autonomously to the minimum-energy operating point. Experiments confirm successful tracking under both low-to-high and high-to-low loading transitions, with mean response times of 11.55 s and 11.16 s respectively using three-cycle averaging.
What carries the argument
A load metric extracted from current waveform features that triggers a two-phase adaptive voltage strategy to locate and maintain the minimum-energy voltage per mechanical cycle.
If this is right
- The motor autonomously relocates to the new minimum-energy voltage after both increases and decreases in external load.
- Average tracking completes in roughly 11 seconds for either direction of load change when using three-cycle averaging.
- Converged voltages stabilize near 2.73 V under higher load and 2.0 V under lower load.
- Energy per cycle is reduced relative to conservative fixed-voltage operation while still guaranteeing cycle completion.
Where Pith is reading between the lines
- The same current-feature approach could be adapted to track efficiency optima in other small actuators whose load varies during use.
- Long-term monitoring of shifts in the converged voltage might reveal gradual motor wear before failure occurs.
- Pairing the load metric with occasional temperature checks would reduce the risk of misattributing thermal effects to load changes.
Load-bearing premise
Current waveform features give an unconfounded reading of mechanical load that is not altered by motor temperature, wear, or supply voltage ripple.
What would settle it
A controlled test that applies a known abrupt change in mechanical load torque and measures whether the extracted metric fails to register the change or whether the converged voltage produces higher energy per cycle than a nearby fixed voltage under the same load.
Figures





read the original abstract
Micro DC brushed motors are widely deployed in battery-powered biomedical systems, where limited energy budgets and variable physiological loading impose stringent efficiency and safety constraints. However, conventional actuation strategies rely on conservative voltage margins to avoid stalling, leading to systematic energy inefficiency. Furthermore, existing methods primarily optimize steady-state performance, neglecting the energy required to complete individual actuation cycles under dynamic conditions. This paper reveals that the energy consumption per mechanical cycle of a DC motor exhibits a non-monotonic dependence on driving voltage, with a load-dependent minimum that shifts with external loading. Based on this insight, we propose a real-time operating-point tracking method that enables the motor to autonomously converge to its minimum-energy condition. A lightweight load metric derived from current waveform features is introduced to detect load variation, and a two-phase adaptive voltage strategy is developed to track the optimal operating point online. Experimental results demonstrate that the proposed method can track the new minimum-energy operating region under both low-to-high and high-to-low loading transitions. With 3-cycle averaging, the mean response time is 11.55s for the low-to-high case and 11.16s for the high-to-low case, while the mean convergence voltage is 2.73V and 2.0V, respectively.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that energy consumption per mechanical cycle in micro DC brushed motors exhibits a non-monotonic dependence on driving voltage, with a load-dependent minimum that shifts under variable external loading. It proposes a real-time operating-point tracking method using a lightweight load metric derived from current waveform features to detect load changes, combined with a two-phase adaptive voltage strategy to converge to the minimum-energy point online. Experiments under low-to-high and high-to-low loading transitions report successful tracking, with mean response times of 11.55 s and 11.16 s and convergence voltages of 2.73 V and 2.0 V after applying 3-cycle averaging.
Significance. If the load metric is shown to be robust, the work offers a practical method for improving energy efficiency in battery-powered biomedical micro-actuators by avoiding conservative voltage margins and adapting to dynamic physiological loads. The empirical demonstration of non-monotonic energy behavior and online tracking represents a useful extension beyond steady-state optimization, with potential impact in resource-constrained systems.
major comments (3)
- Experimental results section: The reported mean response times and convergence voltages depend on post-hoc 3-cycle averaging, which directly shapes the metrics; the manuscript must present unaveraged cycle-by-cycle data, justify the window choice, and show sensitivity analysis to confirm that tracking performance is not an artifact of this smoothing.
- Section describing the lightweight load metric: This metric, derived from current waveform features, is load-bearing for detecting external mechanical load shifts and triggering the adaptive voltage strategy, yet no controlled experiments isolate mechanical load while holding temperature, brush wear, or supply ripple fixed. Without such validation, the observed convergence voltages (2.73 V and 2.0 V) cannot be confidently attributed to true minima rather than confounds.
- Abstract and experimental results: No error bars, standard deviations, raw data traces, or statistical tests (e.g., significance of response time differences) accompany the tracking claims, undermining assessment of repeatability and reliability under dynamic loading.
minor comments (1)
- The abstract and methods should explicitly define the current waveform features (e.g., RMS, peak-to-peak, or spectral content) used in the load metric for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. These have highlighted important aspects of experimental rigor and validation that we will address in the revised manuscript. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: Experimental results section: The reported mean response times and convergence voltages depend on post-hoc 3-cycle averaging, which directly shapes the metrics; the manuscript must present unaveraged cycle-by-cycle data, justify the window choice, and show sensitivity analysis to confirm that tracking performance is not an artifact of this smoothing.
Authors: We agree that the 3-cycle averaging directly influences the reported mean response times and convergence voltages, and that transparency requires showing the underlying cycle-by-cycle behavior. In the revised manuscript we will add unaveraged time-series plots of the load metric, voltage command, and energy per cycle for representative trials. The 3-cycle window was selected to attenuate high-frequency stochastic fluctuations arising from brush commutation and minor mechanical jitter while preserving responsiveness to genuine load steps; this choice was informed by preliminary observations of cycle-to-cycle variance in the current waveform. We will include a sensitivity analysis comparing 1-, 2-, 3-, and 5-cycle averaging windows, demonstrating that the qualitative tracking behavior, direction of voltage adaptation, and final convergence region remain consistent across these windows, with the 3-cycle choice providing the best balance between noise suppression and detection latency. revision: yes
-
Referee: Section describing the lightweight load metric: This metric, derived from current waveform features, is load-bearing for detecting external mechanical load shifts and triggering the adaptive voltage strategy, yet no controlled experiments isolate mechanical load while holding temperature, brush wear, or supply ripple fixed. Without such validation, the observed convergence voltages (2.73 V and 2.0 V) cannot be confidently attributed to true minima rather than confounds.
Authors: We acknowledge that the current experimental description does not explicitly isolate mechanical load from potential confounds such as temperature drift, brush wear, or supply ripple. In the revised manuscript we will expand the load-metric section with a dedicated validation subsection. This will describe additional controlled trials in which mechanical load is varied systematically (via a calibrated torque applicator) while (i) ambient temperature is held constant within ±0.5 °C, (ii) fresh motors are used for each trial to eliminate cumulative brush wear, and (iii) supply ripple is monitored and kept below 20 mV peak-to-peak using a low-noise linear regulator. The results will show that the selected current-waveform features (peak amplitude and commutation ripple) change monotonically and predominantly with the applied mechanical load, thereby supporting attribution of the tracked voltages to the underlying energy minima rather than extraneous factors. revision: yes
-
Referee: Abstract and experimental results: No error bars, standard deviations, raw data traces, or statistical tests (e.g., significance of response time differences) accompany the tracking claims, undermining assessment of repeatability and reliability under dynamic loading.
Authors: We agree that the absence of variability measures and statistical support limits evaluation of repeatability. In the revised version we will augment both the abstract and the experimental-results section with (i) error bars denoting standard deviation across repeated trials (minimum n = 5 per transition direction), (ii) representative raw-data traces of the load metric, commanded voltage, and measured energy per cycle, and (iii) a statistical comparison (paired t-test) of the response-time distributions for the low-to-high versus high-to-low cases, reporting the resulting p-value and effect size. These additions will allow readers to assess the reliability of the reported mean response times (11.55 s and 11.16 s) and convergence voltages under dynamic loading. revision: yes
Circularity Check
No circularity: empirical observation and adaptive controller are independent of inputs
full rationale
The paper's derivation chain consists of an experimental revelation of non-monotonic energy-per-cycle vs. voltage (with load-dependent minimum) followed by a proposed real-time tracking controller using a current-waveform load metric and two-phase adaptive voltage. No equations, fitted parameters, or self-citations are presented that reduce the claimed minimum-energy tracking result to a quantity defined in terms of itself or to a prior self-citation. The central result is validated by physical experiments on load transitions rather than by algebraic identity or ansatz smuggling. This is the normal non-circular case for an empirical control paper.
Axiom & Free-Parameter Ledger
free parameters (1)
- 3-cycle averaging window
axioms (1)
- domain assumption Energy per mechanical cycle is a well-defined, measurable quantity that can be minimized by voltage adjustment under fixed load.
Reference graph
Works this paper leans on
-
[1]
Ingestible electronics for diagnostics and t herapy,
C. Steiger, A. Abramson, P . Nadeau, A. P . Chandrakasan, R . Langer, and G. Traverso, “Ingestible electronics for diagnostics and t herapy,” Nature Reviews Materials, vol. 4, no. 2, pp. 83–98, 2019
work page 2019
-
[2]
Ap- plication of micro/nanorobot in medicine,
T. Sun, J. Chen, J. Zhang, Z. Zhao, Y . Zhao, J. Sun, and H. Ch ang, “Ap- plication of micro/nanorobot in medicine,” Frontiers in Bioengineering and Biotechnology, vol. 12, p. 1347312, 2024
work page 2024
-
[3]
Actuators for implantable devices: A broad view ,
B. Y an, “Actuators for implantable devices: A broad view ,” Microma- chines, vol. 13, no. 10, p. 1756, 2022
work page 2022
-
[4]
Power approaches for implantable medical devices,
A. Ben Amar, A. B. Kouki, and H. Cao, “Power approaches for implantable medical devices,” sensors, vol. 15, no. 11, pp. 28 889– 28 914, 2015
work page 2015
-
[5]
Therm al analysis of heat transfer from catheters and implantable devices to the blood flow,
H. Zangooei, S. A. Mirbozorgi, and S. Mirbozorgi, “Therm al analysis of heat transfer from catheters and implantable devices to the blood flow,” Micromachines, vol. 12, no. 3, p. 230, 2021
work page 2021
-
[6]
The development of neural stimulators: a review of preclinical safety and efficacy studies,
R. K. Shepherd, J. Villalobos, O. Burns, and D. A. Nayagam , “The development of neural stimulators: a review of preclinical safety and efficacy studies,” Journal of neural engineering , vol. 15, no. 4, p. 041004, 2018
work page 2018
-
[7]
V . Iacovacci, E. Diller, D. Ahmed, and A. Menciassi, “Med ical micro- robots,” Annual Review of Biomedical Engineering , vol. 26, no. 1, pp. 561–591, 2024
work page 2024
-
[8]
Robotic wireless capsule endoscopy: recent adv ances and upcoming technologies,
Q. Cao, R. Deng, Y . Pan, R. Liu, Y . Chen, G. Gong, J. Zou, H. Y ang, and D. Han, “Robotic wireless capsule endoscopy: recent adv ances and upcoming technologies,” Nature Communications , vol. 15, no. 1, p. 4597, 2024
work page 2024
-
[9]
D. A. Barkas, G. C. Ioannidis, C. S. Psomopoulos, S. D. Kam inaris, and G. A. V okas, “Brushed dc motor drives for industrial and auto mobile applications with emphasis on control techniques: A compre hensive review,” Electronics, vol. 9, no. 6, p. 887, 2020
work page 2020
-
[10]
E. V azquez-Sanchez, J. Gomez-Gil, J. C. Gamazo-Real, a nd J. F. D´ ıez- Higuera, “A new method for sensorless estimation of the spee d and position in brushed dc motors using support vector machines ,” IEEE Transactions on industrial electronics , vol. 59, no. 3, pp. 1397–1408, 2011
work page 2011
-
[11]
Lo ad torque estima- tion and passivity-based control of a boost-converter/dc- motor combina- tion,
J. Linares-Flores, J. Reger, and H. Sira-Ram´ ırez, “Lo ad torque estima- tion and passivity-based control of a boost-converter/dc- motor combina- tion,” IEEE Transactions on Control Systems Technology , vol. 18, no. 6, pp. 1398–1405, 2010
work page 2010
-
[12]
T. V erstraten, R. Furnemont, P . Lopez-Garcia, B. V ande rborght, and D. Lefeber, “Modeling and design of geared DC motors for ener gy efficiency: Comparison between theory and experiments,” Mechanism and Machine Theory , vol. 98, pp. 388–402, Apr. 2016
work page 2016
-
[13]
Power optimization in battery-powered micro -motors,
H.-W. Huang, N. Khandelwal, T. Kerssemakers, I. Ballin ger, and G. Traverso, “Power optimization in battery-powered micro -motors,” in 2022 IEEE International Conference on Cyborg and Bionic Sys tems (CBS). IEEE, 2023, pp. 274–279
work page 2022
-
[14]
Energy consumption of geared DC motors in dynam ic applications: Comparing modeling approaches,
T. V erstraten, R. Furnemont, G. Mathijssen, B. V anderb orght, and D. Lefeber, “Energy consumption of geared DC motors in dynam ic applications: Comparing modeling approaches,” IEEE Robotics and Automation Letters, vol. 1, no. 1, pp. 524–530, Jan. 2016
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.