Reidemeister and movie moves for involutive links
Pith reviewed 2026-05-22 10:58 UTC · model grok-4.3
The pith
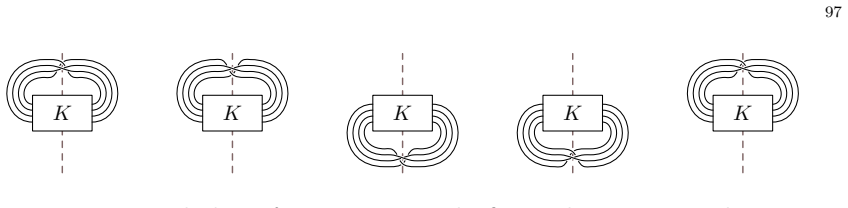
A set of 39 equivariant movie moves suffices to connect any two movie presentations of equivariantly isotopic cobordisms between involutive links.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
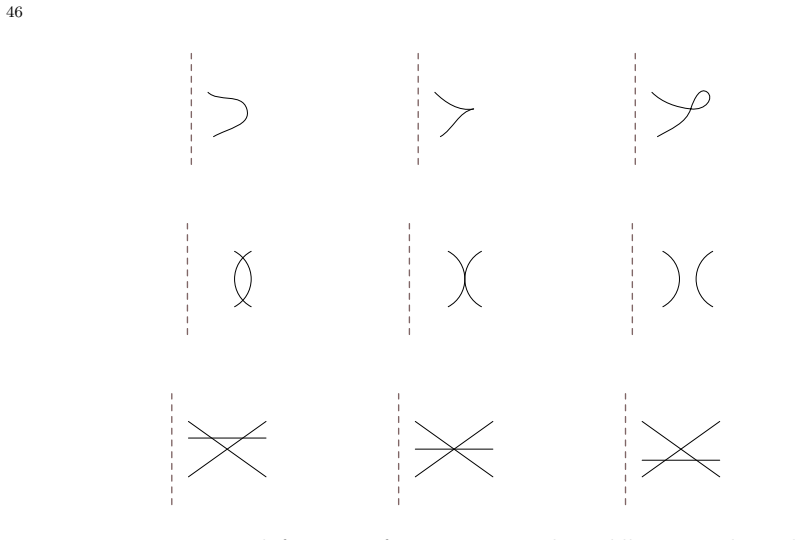
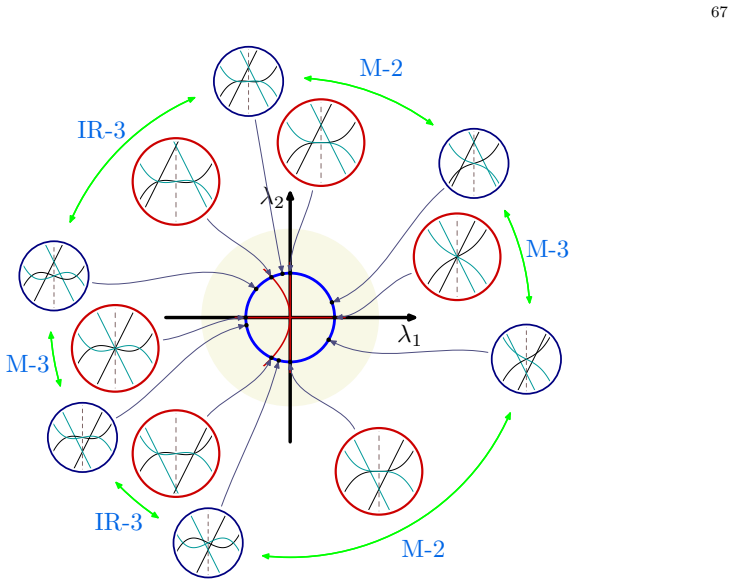
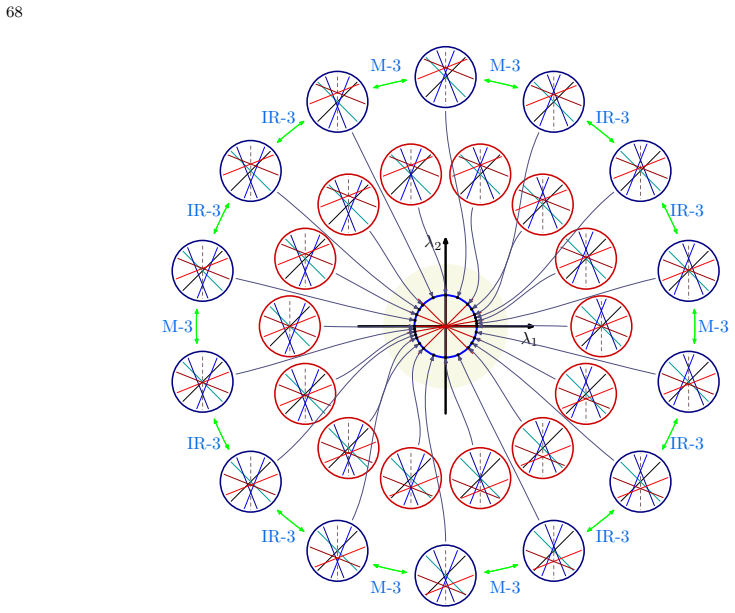
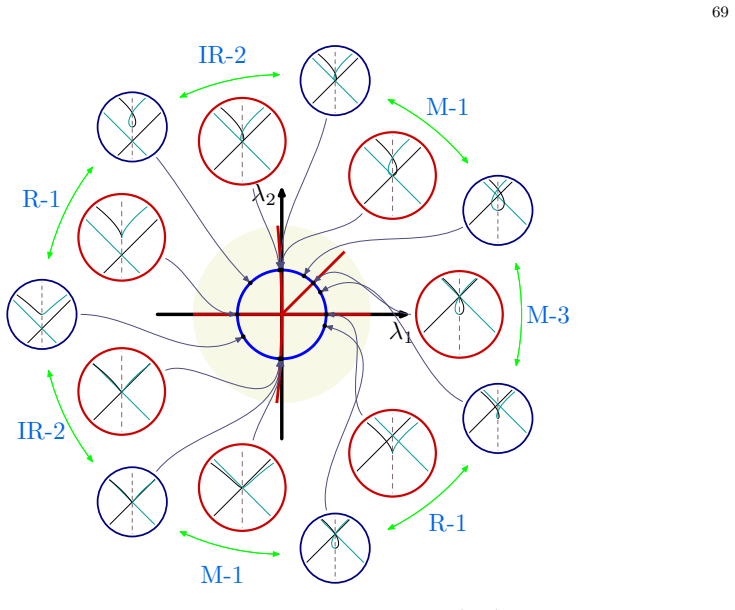
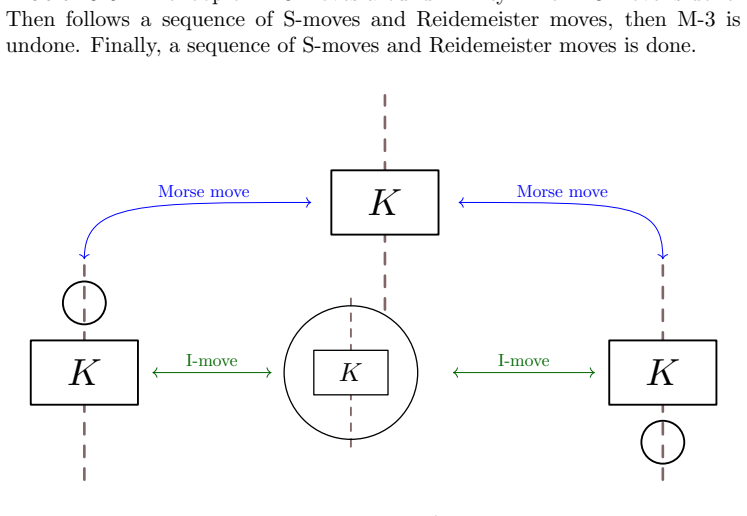
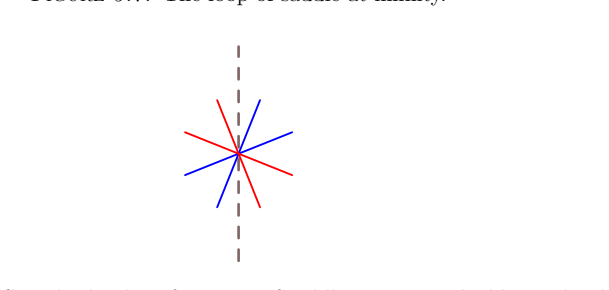
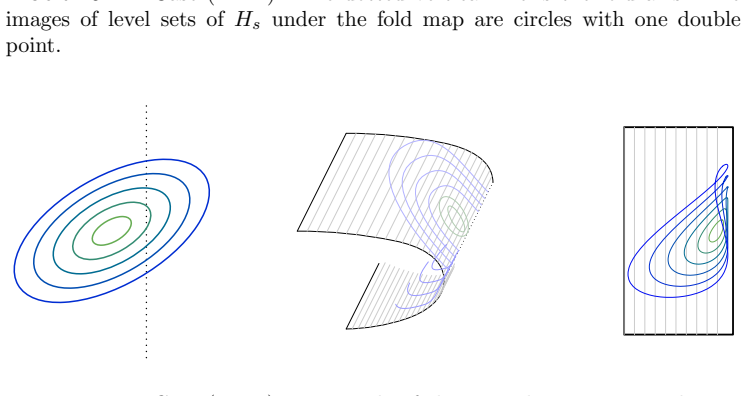
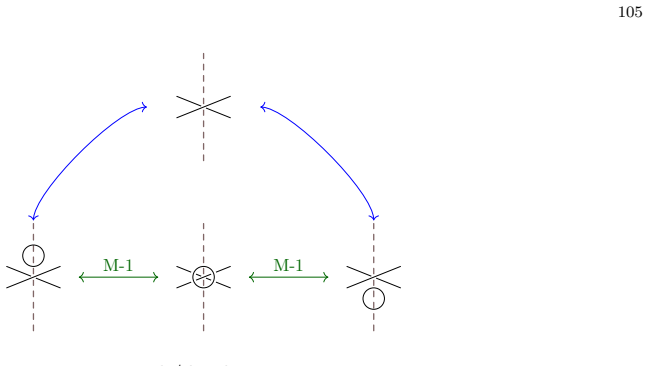
The authors show that 39 equivariant movie moves are sufficient to relate any two movie presentations of a pair of equivariantly isotopic cobordisms. Their proof proceeds by classifying codimension-2 singularities of equivariant maps from the circle to the plane and by using embedded equivariant Morse theory to handle the changes in height functions.
What carries the argument
The collection of 39 equivariant movie moves derived from codimension-2 singularities of equivariant maps S^1 to R^2.
If this is right
- Equivariant cobordisms can be manipulated combinatorially using these moves.
- The equivariant Reidemeister theorem follows from the same singularity analysis.
- Loops formed by sequences of equivariant Reidemeister moves become classifiable.
- This framework supports the development of equivariant link invariants.
Where Pith is reading between the lines
- Algorithms for checking equivariant isotopy of cobordisms could be built from the moves.
- The methods may extend to other finite group actions on links beyond order-two rotations.
- Equivariant versions of Floer or Khovanov homologies might be defined using these diagrams.
Load-bearing premise
All isotopies of the equivariant cobordisms arise from the listed codimension-two singularities and the standard moves of equivariant Morse theory.
What would settle it
A pair of movie presentations of equivariantly isotopic cobordisms that cannot be transformed into each other using only the 39 moves would disprove the claim.
Figures



























































read the original abstract
An involutive link is a link which is invariant under the standard rotation by 180 degrees in $S^3$. We establish an equivariant analogue of the work of Carter and Saito aimed at studying equivariant cobordisms between involutive links. This gives a set of $39$ equivariant movie moves that suffice to go between any two movie presentations of a pair of equivariantly isotopic cobordisms. Along the way, we give a singularity-theoretic proof of the equivariant Reidemeister theorem and study loops of equivariant Reidemeister moves. Our approach proceeds by analyzing codimension $2$ singularities of equivariant maps from $S^1$ to $\mathbb{R}^2$, as well as utilizing embedded equivariant Morse theory.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops an equivariant analogue of the Carter-Saito theory for involutive links (links in S^3 invariant under the standard 180-degree rotation). It gives a singularity-theoretic proof of the equivariant Reidemeister theorem and classifies codimension-2 singularities of Z/2-equivariant maps S^1 → R^2 together with embedded equivariant Morse theory, concluding that a specific set of 39 equivariant movie moves suffices to relate any two movie presentations of equivariantly isotopic cobordisms.
Significance. If the classification of singularities and the resulting 39 moves are exhaustive, the work supplies a concrete combinatorial framework for equivariant cobordisms between involutive links. This extends classical results in a systematic way and could support further development of equivariant invariants or 4-dimensional constructions with involutions. The use of standard singularity theory and Morse theory to derive the moves, rather than ad-hoc listing, is a methodological strength.
major comments (2)
- [singularity classification of equivariant maps S¹→R²] The completeness of the 39-move list rests on the claim that all local changes arising from codim-2 singularities of equivariant S^1 → R^2 maps (including those forced to lie on or be preserved by the fixed set of the involution) are captured by the enumerated moves. The manuscript should supply an explicit case-by-case verification or reduction argument showing that symmetric or fixed-set degeneracies do not produce additional independent movie changes outside the 39.
- [proof of sufficiency of the 39 moves] The sufficiency statement for the movie moves requires that every equivariant isotopy of cobordisms can be realized by a generic 1-parameter family whose only singularities are the classified codim-2 events or the embedded equivariant Morse moves. A precise statement of the genericity theorem used (including the dimension count for the fixed-set contributions) would strengthen the argument that no further moves are needed.
minor comments (2)
- Notation for the involution and the fixed set should be introduced once and used consistently; currently the rotation is described in the abstract but the fixed-set notation varies in the singularity analysis.
- A table or diagram summarizing the 39 moves by type (Reidemeister, Morse, birth-death, etc.) would improve readability and allow direct comparison with the classical Carter-Saito list.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive suggestions. The comments identify places where additional explicit verification and precision would strengthen the exposition of the singularity classification and genericity arguments. We have revised the manuscript accordingly and address each point below.
read point-by-point responses
-
Referee: [singularity classification of equivariant maps S¹→R²] The completeness of the 39-move list rests on the claim that all local changes arising from codim-2 singularities of equivariant S^1 → R^2 maps (including those forced to lie on or be preserved by the fixed set of the involution) are captured by the enumerated moves. The manuscript should supply an explicit case-by-case verification or reduction argument showing that symmetric or fixed-set degeneracies do not produce additional independent movie changes outside the 39.
Authors: We agree that an explicit verification strengthens the argument. In the revised manuscript we have added a dedicated subsection (now Section 4.3) containing a case-by-case enumeration of all codimension-2 singularities of equivariant maps S¹ → R² that are either symmetric or intersect the fixed set. For each local model we compute the possible generic perturbations respecting the involution and show that the resulting movie changes are among the 39 already listed; no new independent moves appear. The analysis uses the standard classification of equivariant singularities together with direct normal-form computations on the fixed set (a circle or isolated points) and confirms that all degeneracies reduce to the enumerated list. revision: yes
-
Referee: [proof of sufficiency of the 39 moves] The sufficiency statement for the movie moves requires that every equivariant isotopy of cobordisms can be realized by a generic 1-parameter family whose only singularities are the classified codim-2 events or the embedded equivariant Morse moves. A precise statement of the genericity theorem used (including the dimension count for the fixed-set contributions) would strengthen the argument that no further moves are needed.
Authors: We have expanded the statement of the genericity result (now Theorem 5.1) to include explicit dimension counts. The fixed set of the involution is a circle; its contribution to the jet space raises the codimension of certain strata by 1 or 2 depending on whether the singularity is transverse or tangent to the fixed set. Standard equivariant transversality then shows that a generic 1-parameter family of equivariant embeddings encounters only the codimension-2 singularities already classified or the embedded equivariant Morse moves. We have included the relevant dimension calculations and a brief reference to the equivariant jet transversality theorem used. revision: yes
Circularity Check
No circularity: central claim derived from external singularity classification and equivariant Morse theory
full rationale
The paper establishes the 39 equivariant movie moves by classifying codimension-2 singularities of equivariant maps S¹ → ℝ² together with embedded equivariant Morse theory. This is a direct extension of the classical Carter-Saito approach using standard tools from singularity theory and Morse theory drawn from the prior literature rather than any self-definition, fitted parameter renamed as prediction, or load-bearing self-citation. The derivation chain therefore remains independent of the target result; the sufficiency statement follows from exhaustive enumeration of local changes under the Z/2-action and does not reduce to the input data by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Standard classification of codimension-2 singularities for equivariant maps from S^1 to R^2
- domain assumption Embedded equivariant Morse theory applies to the isotopy of involutive links
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Our approach proceeds by analyzing codimension 2 singularities of equivariant maps from S¹ to R², as well as utilizing embedded equivariant Morse theory.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We give a singularity-theoretic proof of the equivariant Reidemeister theorem and study loops of equivariant Reidemeister moves.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
V. I. Arnold, S. M. Gusein-Zade, and A. N. Varchenko, Singularities of differentiable maps. V olume 1 , Modern Birkh\"auser Classics, Birkh\"auser/Springer, New York, 2012, Classification of critical points, caustics and wave fronts, Translated from the Russian by Ian Porteous based on a previous translation by Mark Reynolds, Reprint of the 1985 edition. 2896292
work page 2012
-
[2]
Manabu Akaho, Morse homology and manifolds with boundary, Commun. Contemp. Math. 9 (2007), no. 3, 301--334. 2336820
work page 2007
-
[3]
Manabu Akaho, Morse homology of manifolds with boundary revisited, preprint, arXiv:1408.1474
work page internal anchor Pith review Pith/arXiv arXiv
-
[4]
V. I. Arnold, Geometrical methods in the theory of ordinary differential equations, second ed., Grundlehren der mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences], vol. 250, Springer-Verlag, New York, 1988, Translated from the Russian by Joseph Sz\" u cs [J\' o zsef M. Sz u cs]. 947141
work page 1988
-
[5]
, Plane curves, their invariants, perestroikas and classifications, Singularities and bifurcations, Adv. Soviet Math., vol. 21, Amer. Math. Soc., Providence, RI, 1994, With an appendix by F. Aicardi, pp. 33--91. 1310595
work page 1994
- [6]
- [7]
- [8]
-
[9]
Knot Theory Ramifications 19 (2010), no
Christian Blanchet, An oriented model for K hovanov homology , J. Knot Theory Ramifications 19 (2010), no. 2, 291--312. 2647055
work page 2010
-
[10]
Dror Bar-Natan, Khovanov's homology for tangles and cobordisms, Geom. Topol. 9 (2005), 1443--1499. 2174270
work page 2005
-
[11]
Maciej Borodzik and Mark Powell, Embedded M orse T heory and R elative S plitting of C obordisms of M anifolds , J. Geom. Anal. 26 (2016), no. 1, 57--87. 3441503
work page 2016
-
[12]
Bredon, Introduction to compact transformation groups, Pure and Applied Mathematics, Vol
Glen E. Bredon, Introduction to compact transformation groups, Pure and Applied Mathematics, Vol. 46, Academic Press, New York-London, 1972. 0413144
work page 1972
-
[13]
Maciej Borodzik and Henryk \.Zo adek, Complex algebraic plane curves via P oincar\'e- H opf formula. III . C odimension bounds , J. Math. Kyoto Univ. 48 (2008), no. 3, 529--570. 2511050
work page 2008
-
[14]
Jae Choon Cha and Ki Hyoung Ko, On equivariant slice knots, Proc. Amer. Math. Soc. 127 (1999), no. 7, 2175--2182. 1605928
work page 1999
-
[15]
David Clark, Scott Morrison, and Kevin Walker, Fixing the functoriality of K hovanov homology , Geom. Topol. 13 (2009), no. 3, 1499--1582. 2496052
work page 2009
-
[16]
J. Scott Carter, Joachim H. Rieger, and Masahico Saito, A combinatorial description of knotted surfaces and their isotopies, Adv. Math. 127 (1997), no. 1, 1--51. 1445361
work page 1997
-
[17]
J. Scott Carter and Masahico Saito, Reidemeister moves for surface isotopies and their interpretation as moves to movies, J. Knot Theory Ramifications 2 (1993), no. 3, 251--284. 1238875
work page 1993
-
[18]
J. M. S. David, Projection-generic curves, J. London Math. Soc. (2) 27 (1983), no. 3, 552--562. 697147
work page 1983
-
[19]
Irving Dai, Abhishek Mallick, and Matthew Stoffregen, Equivariant knots and knot F loer homology , Journal of Topology 16 (2023), no. 3, 1167--1236
work page 2023
-
[20]
Davis and Swatee Naik, Alexander polynomials of equivariant slice and ribbon knots in S^3 , Trans
James F. Davis and Swatee Naik, Alexander polynomials of equivariant slice and ribbon knots in S^3 , Trans. Amer. Math. Soc. 358 (2006), no. 7, 2949--2964. 2216254
work page 2006
-
[21]
Alessio Di Prisa, The equivariant concordance group is not abelian, Bull. Lond. Math. Soc. 55 (2023), no. 1, 502--507. 4568356
work page 2023
-
[22]
, Equivariant algebraic concordance of strongly invertible knots, J. Topol. 17 (2024), no. 4, Paper No. e70006, 44. 4822933
work page 2024
-
[23]
Michael Ehrig, Daniel Tubbenhauer, and Paul Wedrich, Functoriality of colored link homologies, Proc. Lond. Math. Soc. (3) 117 (2018), no. 5, 996--1040. 3877770
work page 2018
-
[24]
Band 153, Springer-Verlag New York, Inc., New York, 1969
Herbert Federer, Geometric measure theory, Die Grundlehren der mathematischen Wissenschaften, vol. Band 153, Springer-Verlag New York, Inc., New York, 1969. 257325
work page 1969
-
[25]
Thomas Fiedler and Vitaliy Kurlin, A 1-parameter approach to links in a solid torus, J. Math. Soc. Japan 62 (2010), no. 1, 167--211. 2648220
work page 2010
-
[26]
M. Golubitsky and V. Guillemin, Stable mappings and their singularities, Graduate Texts in Mathematics, Vol. 14, Springer-Verlag, New York-Heidelberg, 1973. 0341518
work page 1973
-
[27]
Giller, Towards a classical knot theory for surfaces in R 4 , Illinois J
Cole A. Giller, Towards a classical knot theory for surfaces in R 4 , Illinois J. Math. 26 (1982), no. 4, 591--631. 674227
work page 1982
-
[28]
G. H. Hardy, Divergent series, \'Editions Jacques Gabay, Sceaux, 1992, With a preface by J. E. Littlewood and a note by L. S. Bosanquet, Reprint of the revised (1963) edition. 1188874
work page 1992
- [29]
-
[30]
Magnus Jacobsson, An invariant of link cobordisms from K hovanov homology , Algebr. Geom. Topol. 4 (2004), 1211--1251. 2113903
work page 2004
-
[31]
Mikhail Khovanov, A categorification of the J ones polynomial , Duke Math. J. 101 (2000), no. 3, 359--426. 1740682
work page 2000
-
[32]
, A functor-valued invariant of tangles, Algebr. Geom. Topol. 2 (2002), 665--741. 1928174
work page 2002
-
[33]
Robert Lipshitz and Sucharit Sarkar, Khovanov homology of strongly invertible knots and their quotients, Frontiers in geometry and topology, Proc. Sympos. Pure Math., vol. 109, Amer. Math. Soc., Providence, RI, [2024] 2024, pp. 157--182. 4772951
work page 2024
-
[34]
Andrew Lobb and Liam Watson, A refinement of K hovanov homology , Geom. Topol. 25 (2021), no. 4, 1861--1917. 4286365
work page 2021
- [35]
-
[36]
Jean Martinet, D\'eploiements versels des applications diff\'erentiables et classification des applications stables, Singularit\'es d'applications diff\'erentiables ( S \'em., P lans-sur- B ex, 1975), Lecture Notes in Math., vol. Vol. 535, Springer, Berlin-New York, 1976, pp. 1--44. 649264
work page 1975
-
[37]
Morgan and Hyman Bass, The S mith conjecture , Pure Appl
John W. Morgan and Hyman Bass, The S mith conjecture , Pure Appl. Math., vol. 112, Academic Press, Orlando, FL, 1984, pp. 3--6. 758460
work page 1984
-
[38]
Alice Merz, The A lexander and M arkov theorems for strongly involutive links , J. Lond. Math. Soc. (2) 111 (2025), no. 4, Paper No. e70156, 60. 4892887
work page 2025
-
[39]
Allison N. Miller and Mark Powell, Strongly invertible knots, equivariant slice genera, and an equivariant algebraic concordance group, J. Lond. Math. Soc. (2) 107 (2023), no. 6, 2025--2053. 4598178
work page 2023
-
[40]
Kunio Murasugi, On periodic knots, Comment. Math. Helv. 46 (1971), 162--174. 292060
work page 1971
-
[41]
Scott Morrison, Kevin Walker, and Paul Wedrich, Invariants of 4-manifolds from K hovanov- R ozansky link homology , Geom. Topol. 26 (2022), no. 8, 3367--3420. 4562565
work page 2022
-
[42]
Ciprian Manolescu, Kevin Walker, and Paul Wedrich, Skein lasagna modules and handle decompositions, Adv. Math. 425 (2023), Paper No. 109071, 40. 4589588
work page 2023
-
[43]
Swatee Naik, Periodicity, genera and A lexander polynomials of knots , Pacific J. Math. 166 (1994), no. 2, 357--371. 1313460
work page 1994
-
[44]
Dennis Roseman, Reidemeister-type moves for surfaces in four-dimensional space, Knot theory ( W arsaw, 1995), Banach Center Publ., vol. 42, Polish Acad. Sci. Inst. Math., Warsaw, 1998, pp. 347--380. 1634466
work page 1995
- [45]
-
[46]
Taketo Sano, Involutive khovanov homology and equivariant knots, 2025
work page 2025
-
[47]
Jan Stevens, On the classification of reducible curve singularities, Algebraic geometry and singularities ( L a R \'abida, 1991), Progr. Math., vol. 134, Birkh\"auser, Basel, 1996, pp. 383--407. 1395193
work page 1991
-
[48]
U ber I nvolutionen der 3 - S ph\
Friedhelm Waldhausen, \" U ber I nvolutionen der 3 - S ph\" a re , Topology 8 (1969), 81--91. 236916
work page 1969
-
[49]
C. T. C. Wall, Equivariant jets, Math. Ann. 272 (1985), no. 1, 41--65. 794090
work page 1985
-
[50]
, Projection genericity of space curves, J. Topol. 1 (2008), no. 2, 362--390. 2399135
work page 2008
-
[51]
Wasserman, Equivariant differential topology, Topology 8 (1969), 127--150
Arthur G. Wasserman, Equivariant differential topology, Topology 8 (1969), 127--150. 250324
work page 1969
-
[52]
Liam Watson, Khovanov homology and the symmetry group of a knot, Adv. Math. 313 (2017), 915--946. 3649241
work page 2017
- [53]
-
[54]
Hassler Whitney, On regular closed curves in the plane, Compositio Math. 4 (1937), 276--284. 1556973
work page 1937
-
[55]
, Differentiable even functions, Duke Math. J. 10 (1943), 159--160. 7783
work page 1943
-
[56]
, On singularities of mappings of euclidean spaces. I . M appings of the plane into the plane , Ann. of Math. (2) 62 (1955), 374--410. 73980
work page 1955
- [57]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.