Interaction Forces and Internal Loads in Parallel Manipulators with Actuation Redundancy
Pith reviewed 2026-05-07 09:31 UTC · model grok-4.3
The pith
Parallel manipulators with actuation redundancy require resolved definitions of interaction forces and internal loads to produce correct joint torques.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The two common characterizations of null-space wrench components from grasp-like systems can be adapted to parallel manipulators with actuation redundancy, but the existing literature contains critical oversights and ambiguities in the definitions of interaction forces and internal loads; explicit synthesis methods are supplied for equilibrating and manipulating joint torque vectors, and a case study demonstrates that these methods correct previously reported erroneous results.
What carries the argument
Explicit synthesis procedures that separate equilibrating and manipulating joint torque vectors once interaction forces and internal loads have been unambiguously defined in the null space of the manipulator's wrench mapping.
If this is right
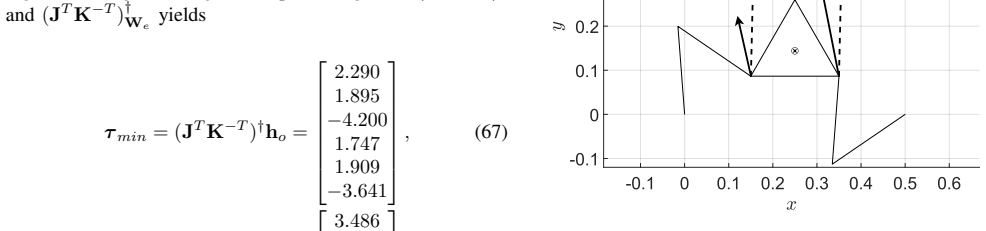
- Joint torques can be partitioned into an equilibrating component that balances external wrenches and a manipulating component that produces desired motions without spurious internal effects.
- Force-distribution calculations reported for actuation-redundant parallel manipulators in prior studies can be revised and made consistent.
- Control laws that rely on null-space torque optimization can avoid the definitional errors identified in the literature.
Where Pith is reading between the lines
- The same definitional clarification may prove useful when extending force analysis to other classes of kinematically redundant mechanisms.
- Actuator placement decisions in future manipulator designs could be guided by the requirement that internal loads remain below material limits once the new synthesis rules are applied.
Load-bearing premise
The two common characterizations of null-space wrench components from grasp-like systems can be directly adapted to parallel manipulators with actuation redundancy without requiring manipulator-specific geometric or dynamic constraints.
What would settle it
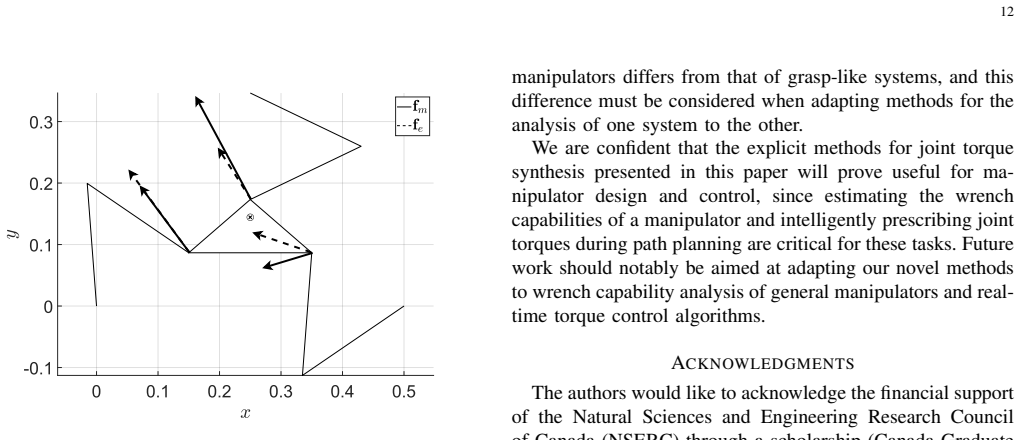
Recompute the joint torques for the paper's case-study manipulator with the proposed synthesis methods and check whether the resulting vectors match or differ from the erroneous values previously published in the literature.
Figures








read the original abstract
This paper discusses null-space wrench components in parallel manipulators. We examine the adaptation of the two most common characterizations of these components in grasp-like systems, namely, interaction forces and internal loads, to parallel manipulators with actuation redundancy. We identify critical oversights in the existing literature on the subject, resolve ambiguities related to the definitions of interaction forces and internal loads, and provide explicit methods for synthesizing equilibrating and manipulating joint torque vectors. A case study is also provided to justify the validity of our novel methods and correct erroneous results reported in the literature.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper examines the adaptation of the two common characterizations of null-space wrench components (interaction forces and internal loads) from grasp-like systems to parallel manipulators with actuation redundancy. It claims to identify critical oversights in the existing literature, resolve ambiguities in the definitions of these components, provide explicit methods for synthesizing equilibrating and manipulating joint torque vectors, and validate the approach via a case study that also corrects erroneous results from prior work.
Significance. If the proposed synthesis methods correctly incorporate the closed-loop kinematic constraints of parallel manipulators and yield torque vectors that satisfy equilibrium without additional fitting, the work could clarify force distribution and torque allocation in redundant actuation, helping to avoid internal loads and improve control design. The explicit correction of literature errors and the case study provide a concrete starting point, though broader applicability remains to be confirmed.
major comments (2)
- The central adaptation of grasp null-space bases (interaction forces and internal loads) to parallel manipulators appears to proceed without explicit additional terms for leg Jacobians, platform constraints, or loop-closure conditions. This risks producing torque vectors outside the true null space of the manipulator's wrench map; the case study may hold for its chosen geometry but does not establish that the methods remain valid under arbitrary redundancy patterns or configurations.
- No error analysis, sensitivity to geometric parameters, or comparison against a full dynamic model (including inertial and Coriolis terms) is reported for the synthesized torques. Without these, it is unclear whether the equilibrating and manipulating components truly decouple as claimed or merely reproduce grasp results that fail to satisfy the parallel manipulator's equilibrium equations.
minor comments (2)
- Notation for the null-space bases and the distinction between equilibrating versus manipulating torques should be introduced with a clear table or diagram early in the manuscript to aid readability.
- The abstract asserts 'explicit methods' and 'validity via case study' but provides no equations or quantitative metrics; moving a brief equation or result summary into the abstract would better convey the contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. Our work provides explicit synthesis methods that incorporate the closed-loop constraints of parallel manipulators when adapting grasp null-space concepts. We address the major comments point by point below.
read point-by-point responses
-
Referee: The central adaptation of grasp null-space bases (interaction forces and internal loads) to parallel manipulators appears to proceed without explicit additional terms for leg Jacobians, platform constraints, or loop-closure conditions. This risks producing torque vectors outside the true null space of the manipulator's wrench map; the case study may hold for its chosen geometry but does not establish that the methods remain valid under arbitrary redundancy patterns or configurations.
Authors: The synthesis methods in the manuscript are derived directly from the wrench mapping matrix of the parallel manipulator, which is constructed using the leg Jacobians, platform wrench contributions, and the loop-closure kinematic constraints. The null-space bases for interaction forces and internal loads are obtained via the appropriate orthogonal complement of this constrained mapping, ensuring the resulting equilibrating and manipulating torque vectors lie exactly in the null space and satisfy equilibrium by construction. The formulation is general and does not depend on specific geometry or redundancy pattern; the case study is provided only for concrete validation and to correct prior literature errors. revision: no
-
Referee: No error analysis, sensitivity to geometric parameters, or comparison against a full dynamic model (including inertial and Coriolis terms) is reported for the synthesized torques. Without these, it is unclear whether the equilibrating and manipulating components truly decouple as claimed or merely reproduce grasp results that fail to satisfy the parallel manipulator's equilibrium equations.
Authors: The decoupling follows from the algebraic properties of the null-space decomposition of the equilibrium wrench map; any torque vector produced by the synthesis lies in the appropriate subspace and therefore satisfies the static equilibrium equations of the parallel manipulator by definition. The case study confirms this by recovering physically consistent force distributions and correcting erroneous results from earlier work. A full dynamic model (inertial/Coriolis) is outside the scope of the paper, which addresses static wrench distribution and null-space characterization; the equilibrium-based methods remain valid independently of dynamics. Sensitivity analysis is feasible with the explicit formulas but was not required for the core contribution. revision: no
Circularity Check
No significant circularity in adaptation of grasp characterizations
full rationale
The paper adapts two standard null-space characterizations (interaction forces and internal loads) from grasp literature to parallel manipulators, identifies literature oversights, resolves definitional ambiguities, and supplies explicit torque synthesis methods validated by case study. No quoted equations or steps reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations; the central claims derive from external grasp references plus manipulator-specific application rather than tautological renaming or input-output equivalence. The derivation chain remains independent of its own outputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
- [1]
-
[2]
Redundancy in parallel mechanisms: A review,
C. Gosselin and L. T. Schreiber, “Redundancy in parallel mechanisms: A review,”Applied Mechanics Reviews, vol. 70, pp. 1–15, 2018
work page 2018
-
[3]
Analysis of motion and internal loading of objects grasped by multiple cooperating manip- ulators,
I. D. Walker, R. A. Freeman, and S. I. Marcus, “Analysis of motion and internal loading of objects grasped by multiple cooperating manip- ulators,”The International Journal of Robotics Research, vol. 10, pp. 396–409, 1991
work page 1991
-
[4]
Force Distribution in Closed Kinematic Chains,
V . R. Kumar and K. J. Waldron, “Force Distribution in Closed Kinematic Chains,”IEEE Transactions on Robotics, vol. 4, no. 6, pp. 657–664, 1988
work page 1988
-
[5]
A symmetric hybrid position/force control scheme for the coordination of two robots,
M. Uchiyama and P. Dauchez, “A symmetric hybrid position/force control scheme for the coordination of two robots,” in1988 IEEE International Conference on Robotics and Automation, 1988
work page 1988
-
[6]
The virtual linkage: A model for internal forces in multi-grasp manipulation,
D. Williams and O. Khatib, “The virtual linkage: A model for internal forces in multi-grasp manipulation,” inIEEE International Conference on Robotics and Automation. IEEE, 1993
work page 1993
-
[7]
Analysis of internal loading at multiple robotic systems,
J. H. Chung, B. J. Yi, and W. K. Kim, “Analysis of internal loading at multiple robotic systems,”Journal of Mechanical Science and Technol- ogy, vol. 19, pp. 1554–1567, 2005
work page 2005
-
[8]
Short paper on the equivalence of internal and interaction forces in multifingered grasping,
B.-R. Zuo and W.-H. Qian, “Short paper on the equivalence of internal and interaction forces in multifingered grasping,”IEEE Transactions on Robotics and Automation, vol. 15, 1999
work page 1999
-
[9]
Internal Force Analysis and Load Distribu- tion for Cooperative Multi-Robot Manipulation,
S. Erhart and S. Hirche, “Internal Force Analysis and Load Distribu- tion for Cooperative Multi-Robot Manipulation,”IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1238–1243, 2015
work page 2015
-
[10]
F. E. Udwadia and R. E. Kalaba,The Fundamental Equation. Cam- bridge University Press, 4 2010, pp. 71–105
work page 2010
-
[11]
A generalized theory of load distribution in redundantly-actuated robotic systems,
J. Flight and C. Gosselin, “A generalized theory of load distribution in redundantly-actuated robotic systems,” 2026. [Online]. Available: https://arxiv.org/abs/2603.11431
-
[12]
S. Krut, O. Company, and F. Pierrot, “Force performance indexes for parallel mechanisms with actuation redundancy, especially for parallel wire-driven manipulators,”2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), vol. 4, pp. 3936–3941, 2004
work page 2004
-
[13]
Force capabilities of redundantly-actuated parallel manipulators,
S. B. Nokleby, R. Fisher, R. P. Podhorodeski, and F. Firmani, “Force capabilities of redundantly-actuated parallel manipulators,”Mechanism and Machine Theory, vol. 40, no. 5, pp. 578–599, 2005
work page 2005
-
[14]
A. Zibil, F. Firmani, S. B. Nokleby, and R. P. Podhorodeski, “An explicit method for determining the force-moment capabilities of redundantly actuated planar parallel manipulators,”ASME Journal of Mechanical Design, vol. 129, no. 10, pp. 1046–1055, 2007
work page 2007
-
[15]
F. Firmani, A. Zibil, S. B. Nokleby, and R. P. Podhorodeski, “Force- moment capabilities of revolute-jointed planar parallel manipulators with additional actuated branches,”Transactions of the Canadian Society for Mechanical Engineering, vol. 31, pp. 469–480, 2007
work page 2007
-
[16]
——, “Wrench capabilities of planar parallel manipulators. part i: Wrench polytopes and performance indices,”Robotica, vol. 26, pp. 791– 802, 2008
work page 2008
-
[17]
——, “Wrench capabilities of planar parallel manipulators. part ii: Redundancy and wrench workspace analysis,”Robotica, vol. 26, pp. 803–815, 2008
work page 2008
-
[18]
L. Mejia, H. Simas, and D. Martins, “Force capability in general 3 dof planar mechanisms,”Mechanism and Machine Theory, vol. 91, pp. 120–134, 2015. [Online]. Available: http://dx.doi.org/10.1016/j. mechmachtheory.2015.04.013
work page doi:10.1016/j 2015
-
[19]
——, “Wrench capability in redundant planar parallel manipulators with net degree of constraint equal to four, five or six,”Mechanism and Machine Theory, vol. 105, pp. 58–79, 2016. [Online]. Available: http://dx.doi.org/10.1016/j.mechmachtheory.2016.06.020
-
[20]
Wrench capability of hyper-redundant planar parallel manipulators,
L. Mejia, D. Ponce, H. Simas, and D. Martins, “Wrench capability of hyper-redundant planar parallel manipulators,”Mechanisms and Ma- chine Science, vol. 94, pp. 131–139, 2021
work page 2021
-
[21]
Wrench capability analysis of redundantly actuated spatial parallel manipulators,
V . Garg, S. B. Nokleby, and J. A. Carretero, “Wrench capability analysis of redundantly actuated spatial parallel manipulators,”Mechanism and Machine Theory, vol. 44, no. 5, pp. 1070–1081, 2009
work page 2009
-
[22]
Torque distribution in a six-legged robot,
M. S. Erden and K. Leblebicioglu, “Torque distribution in a six-legged robot,”IEEE Transactions on Robotics, vol. 23, pp. 179–186, 2007
work page 2007
-
[23]
Inverse dynamics and internal forces of the redundantly actuated parallel manipulators,
Y . Xu, J. Yao, and Y . Zhao, “Inverse dynamics and internal forces of the redundantly actuated parallel manipulators,”Mechanism and Machine Theory, vol. 51, pp. 172–184, 2012
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.