Joint Communication and Trajectory Design for Movable Antenna Systems
Pith reviewed 2026-05-08 19:05 UTC · model grok-4.3
The pith
A movable antenna can maximize its average transmission rate by transmitting data while moving along a trajectory found via shortest-path optimization on a discretized position graph.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The average rate maximization problem for a single movable antenna that transmits while moving is solved optimally by discretizing the allowable movement region into a finite set of points, constructing a graph with these points as nodes, and reducing the problem to finding the minimum-cost path of fixed hop count where edge costs incorporate both movement time and instantaneous rate at each position.
What carries the argument
The fixed-hop shortest-path reformulation on a graph whose nodes are discrete samples of the antenna movement region; edge weights combine the time to traverse between samples with the rate achieved at the arrival position under the known channel.
If this is right
- For channels with exactly two paths the optimal trajectory admits a closed-form expression without needing the graph.
- The computed trajectory balances time spent moving against time spent transmitting at high-rate positions.
- The same discretization and shortest-path procedure applies to any number of paths once the instantaneous rate function is known.
- Simulation comparisons confirm higher average rates than fixed-position antennas or heuristic movement rules under identical speed limits.
Where Pith is reading between the lines
- The approach could be tested in slowly varying channels by recomputing the graph solution at intervals shorter than the coherence time.
- Finer sampling of the movement region trades higher accuracy for larger graph size and longer computation.
- Multi-antenna extensions would require a joint graph over multiple position tuples, which may remain tractable if the number of antennas is small.
Load-bearing premise
The channel path gains and angles are known perfectly in advance and stay fixed for the entire duration of the antenna's movement.
What would settle it
If the measured average rate achieved by the planned trajectory under real channel conditions is substantially lower than the rate predicted by the graph solution, the optimality claim is falsified.
Figures








read the original abstract
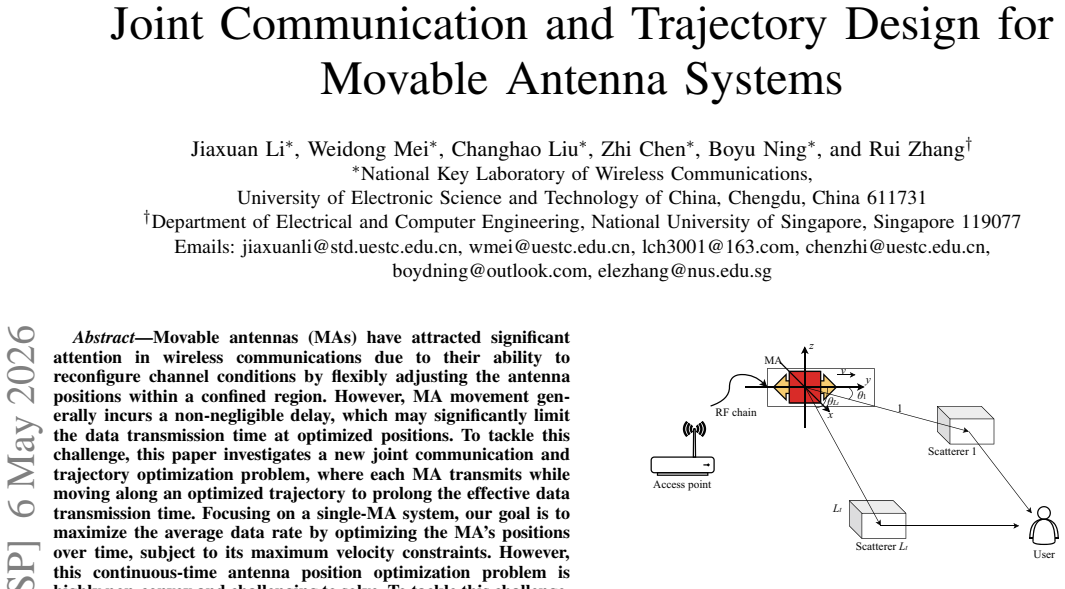
Movable antennas (MAs) have attracted significant attention in wireless communications due to their ability to reconfigure channel conditions by flexibly adjusting the antenna positions within a confined region. However, MA movement generally incurs a non-negligible delay, which may significantly limit the data transmission time at optimized positions. To tackle this challenge, this paper investigates a new joint communication and trajectory optimization problem, where each MA transmits while moving along an optimized trajectory to prolong the effective data transmission time. Focusing on a single-MA system, our goal is to maximize the average data rate by optimizing the MA's positions over time, subject to its maximum velocity constraints. However, this continuous-time antenna position optimization problem is highly non-convex and challenging to solve. To tackle this challenge, we first consider a special case with two channel paths and derive the optimal MA trajectory in closed form. For other general cases, we ingeniously reformulate the average rate maximization problem into a fixed-hop shortest path problem in graph theory by sampling the antenna movement region into a multitude of discrete points, and solve it optimally. Simulation results demonstrate that our proposed algorithm can significantly improve the data rate compared to other baseline schemes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper investigates joint communication and trajectory design for a single movable antenna (MA) to maximize average data rate subject to velocity constraints. For the special case of two channel paths, a closed-form optimal trajectory is derived. For general cases, the continuous-time non-convex problem is discretized by sampling the movement region into a finite set of points, reformulated as a fixed-hop shortest-path problem on a graph (with nodes as positions and edge costs encoding instantaneous rates), and solved to optimality via standard graph algorithms. Simulations show rate improvements over baselines.
Significance. The closed-form solution for the two-path case and the exact optimality guarantee for the discretized problem are clear technical strengths. If the discretization error can be bounded or shown to vanish, the approach would provide a practical, optimally solvable method for MA trajectory planning that trades off movement time against transmission opportunities, with potential impact on reconfigurable wireless systems. The current lack of convergence analysis restricts the result to the sampled instance rather than the original continuous problem.
major comments (2)
- [Abstract and general-case reformulation section] The abstract and the general-case reformulation claim that the method solves the original continuous-time average-rate maximization problem optimally. However, the discrete graph solution equals the continuous optimum only in the limit of infinite sampling density; no discretization-error bound, convergence rate, or proof that the achieved rate approaches the continuous optimum as the grid is refined is provided. This directly undermines the headline optimality claim for the non-convex continuous formulation.
- [System model and problem formulation] The formulation relies on the assumption that channel state (path gains and angles) is perfectly known in advance and remains constant over the entire movement interval. This assumption is load-bearing for the offline trajectory planning but receives no sensitivity analysis or discussion of robustness to channel variation or estimation error.
minor comments (2)
- [Simulation results] The simulation section should report the specific number of discretization points used, the resulting graph size, and the sensitivity of the achieved rate to sampling density.
- [Notation and preliminaries] Notation for time intervals, velocity limits, and instantaneous rate should be introduced once and used consistently; a table summarizing key variables would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the scope of our results. We address each major comment below and describe the corresponding revisions.
read point-by-point responses
-
Referee: [Abstract and general-case reformulation section] The abstract and the general-case reformulation claim that the method solves the original continuous-time average-rate maximization problem optimally. However, the discrete graph solution equals the continuous optimum only in the limit of infinite sampling density; no discretization-error bound, convergence rate, or proof that the achieved rate approaches the continuous optimum as the grid is refined is provided. This directly undermines the headline optimality claim for the non-convex continuous formulation.
Authors: We agree that the wording in the abstract and reformulation section could be interpreted as claiming optimality for the original continuous-time problem. In fact, the graph-theoretic solution is exactly optimal for the discretized problem obtained after sampling the movement region. This discretization yields a high-accuracy approximation when the grid is sufficiently fine, which is the approach taken in the simulations. We will revise the abstract to state that the general-case problem is solved to optimality after discretization into a fixed-hop shortest-path instance, and we will add a clarifying remark in the reformulation section noting that the continuous optimum is approached in the limit of increasing sampling density. We also acknowledge that a formal discretization-error bound or convergence analysis is not derived in the manuscript and will note this as a limitation for future investigation. revision: yes
-
Referee: [System model and problem formulation] The formulation relies on the assumption that channel state (path gains and angles) is perfectly known in advance and remains constant over the entire movement interval. This assumption is load-bearing for the offline trajectory planning but receives no sensitivity analysis or discussion of robustness to channel variation or estimation error.
Authors: The perfect, static CSI assumption is indeed central to enabling the offline joint trajectory and communication design. This modeling choice is standard in the literature on trajectory optimization to focus on the core problem. We will add a paragraph in the system model section discussing the practical implications of this assumption, including the potential impact of channel estimation errors or time variation, and note that periodic re-optimization based on updated estimates can be employed in dynamic settings. A full sensitivity or robust optimization analysis lies outside the current scope but is identified as a direction for future work. revision: partial
Circularity Check
No significant circularity; standard discretization reformulation to graph problem
full rationale
The paper's core step samples the continuous movement region into discrete points and recasts the average-rate objective (with velocity constraints) as a fixed-hop shortest-path instance on the resulting graph, then applies standard graph algorithms to solve the discrete problem to optimality. This is an explicit approximation technique relying on external graph theory (e.g., shortest-path algorithms), not a self-definitional loop, fitted parameter renamed as prediction, or load-bearing self-citation. The two-path closed-form case is derived independently. No equation or claim reduces the stated optimum to its inputs by construction; the derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Channel consists of a finite number of paths whose gains and angles are known perfectly and constant over the movement interval.
- domain assumption Antenna can transmit data at every instant while its position changes continuously subject only to a maximum speed constraint.
Lean theorems connected to this paper
-
Cost.Jcost (J(x)=½(x+x⁻¹)−1)washburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
R[k] = log₂(1 + Pt|h[k]|²/σ²); weight Wi,j = −log₂(1 + Pt|h(pi)|²/σ²)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Movable antennas for wireles s commu- nication: Opportunities and challenges,
L. Zhu, W. Ma, and R. Zhang, “Movable antennas for wireles s commu- nication: Opportunities and challenges,” IEEE Commun. Mag. , vol. 62, no. 6, pp. 114–120, 2024
2024
-
[2]
Movable antenna-enhanced wireless communications: Gen - eral architectures and implementation methods,
B. Ning et al., “Movable antenna-enhanced wireless communications: Gen - eral architectures and implementation methods,” IEEE Wireless Commun. , vol. 32, no. 5, pp. 108–116, 2025
2025
-
[3]
A tutorial on movable antennas for wi reless networks,
L. Zhu, W. Ma, W. Mei, Y . Zeng, Q. Wu, B. Ning, Z. Xiao, X. Sha o, J. Zhang, and R. Zhang, “A tutorial on movable antennas for wi reless networks,” IEEE Commun. Surveys Tuts. , vol. 28, pp. 3002–3054, 2026
2026
-
[4]
Movable antenna e nhanced DF and AF relaying systems: Performance analysis and optimi zation,
N. Li, W. Mei, P . Wu, B. Ning, and L. Zhu, “Movable antenna e nhanced DF and AF relaying systems: Performance analysis and optimi zation,” IEEE Trans. Commun. , vol. 73, no. 12, pp. 13 239–13 255, 2025
2025
-
[5]
Secure wirele ss commu- nication via movable-antenna array,
G. Hu, Q. Wu, K. Xu, J. Si, and N. Al-Dhahir, “Secure wirele ss commu- nication via movable-antenna array,” IEEE Signal Process. Lett. , vol. 31, pp. 516–520, 2024
2024
-
[6]
Antenna position and beamforming optimization for mov- able antenna enabled ISAC: Optimal solutions and efficient a lgorithms,
L. Chen et al., “Antenna position and beamforming optimization for mov- able antenna enabled ISAC: Optimal solutions and efficient a lgorithms,” IEEE Trans. Signal Processing , vol. 73, pp. 3812–3828, 2025
2025
-
[7]
Movable antenna enab led near- field communications: Channel modeling and performance opt imization,
L. Zhu, W. Ma, Z. Xiao, and R. Zhang, “Movable antenna enab led near- field communications: Channel modeling and performance opt imization,” IEEE Trans. Commun. , vol. 73, no. 9, pp. 7240–7256, 2025
2025
-
[8]
Movable antenna enhanced wide-beam coverage: Joint antenna position and beamforming optimization,
D. Wang et al. , “Movable antenna enhanced wide-beam coverage: Joint antenna position and beamforming optimization,” IEEE Trans. Wireless Commun., vol. 25, pp. 3541–3558, 2026
2026
-
[9]
Mova ble-antenna- enhanced wireless-powered mobile-edge computing systems ,
P . Chen, Y . Y ang, B. Lyu, Z. Y ang, and A. Jamalipour, “Mova ble-antenna- enhanced wireless-powered mobile-edge computing systems ,” IEEE Inter- net Things J. , vol. 11, no. 21, pp. 35 505–35 518, 2024
2024
-
[10]
Movable antennas meet intelligent reflecting surface: Friends or fo es?
X. Wei, W. Mei, Q. Wu, Q. Jia, B. Ning, Z. Chen, and J. Fang, “Movable antennas meet intelligent reflecting surface: Friends or fo es?” IEEE Trans. Commun., vol. 73, no. 11, pp. 12 756–12 770, 2025
2025
-
[11]
UA V-enabled passive 6D movable antennas: Joint deploy- ment and beamforming optimization,
C. Liu et al. , “UA V-enabled passive 6D movable antennas: Joint deploy- ment and beamforming optimization,” IEEE Trans. Wireless Commun. , vol. 25, pp. 9765–9781, 2026
2026
-
[12]
Joint beamf orming and antenna position optimization for movable antenna-ass isted spectrum sharing,
X. Wei, W. Mei, D. Wang, B. Ning, and Z. Chen, “Joint beamf orming and antenna position optimization for movable antenna-ass isted spectrum sharing,” IEEE Wireless Commun. Lett. , vol. 13, no. 9, pp. 2502–2506, 2024
2024
-
[13]
Mo vable antenna-enhanced spectrum sensing for cognitive radio,
W. Zhang, W. Mei, C. Liu, Z. Chen, Z. Xiao, and B. Ning, “Mo vable antenna-enhanced spectrum sensing for cognitive radio,” IEEE Trans. V eh. Technol., pp. 1–6, 2026, early access
2026
-
[14]
6D movable antenna base d on user distribution: Modeling and optimization,
X. Shao, Q. Jiang, and R. Zhang, “6D movable antenna base d on user distribution: Modeling and optimization,” IEEE Trans. Wireless Commun. , vol. 24, no. 1, pp. 355–370, 2025
2025
-
[15]
6DMA enhanced wireless network wi th flexible antenna position and rotation: Opportunities and challeng es,
X. Shao and R. Zhang, “6DMA enhanced wireless network wi th flexible antenna position and rotation: Opportunities and challeng es,” IEEE Com- mun. Mag. , vol. 63, no. 4, pp. 121–128, 2025
2025
-
[17]
Trajectory optimiz ation for minimizing movement delay in movable antenna systems,
Q. Li, W. Mei, R. Zhang, and B. Ning, “Trajectory optimiz ation for minimizing movement delay in movable antenna systems,” IEEE Trans. Wireless Commun., vol. 25, pp. 6986–6999, 2026
2026
-
[18]
Energy-Efficient Movable Antennas: Mechanical Power Modeling and Performance Optimization
X. Wei et al. , “Energy-efficient movable antennas: Mechanical power modeling and performance optimization,” IEEE Trans. Wireless Commun., 2026, early access. [Online]. Available: https://arxiv.o rg/abs/2509.24433
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[19]
Compressed sensing based ch annel estimation for movable antenna communications,
W. Ma, L. Zhu, and R. Zhang, “Compressed sensing based ch annel estimation for movable antenna communications,” IEEE Commun. Lett. , vol. 27, no. 10, pp. 2747–2751, Oct. 2023
2023
-
[20]
Channel estimation for movable antenna communication sys tems: A framework based on compressed sensing,
Z. Xiao, S. Cao, L. Zhu, Y . Liu, B. Ning, X.-G. Xia, and R. Z hang, “Channel estimation for movable antenna communication sys tems: A framework based on compressed sensing,” IEEE Trans. Wireless Commun., vol. 23, no. 9, pp. 11 814–11 830, 2024
2024
-
[21]
Successive bay esian reconstructor for channel estimation in fluid antenna syste ms,
Z. Zhang, J. Zhu, L. Dai, and R. W. Heath, “Successive bay esian reconstructor for channel estimation in fluid antenna syste ms,” IEEE Trans. Wireless Commun., vol. 24, no. 3, pp. 1992–2006, 2025
1992
-
[22]
CNN-based channel map estimation for movable antenna systems,
Y . Huang, W. Mei, X. Wei, Z. Chen, and B. Ning, “CNN-based channel map estimation for movable antenna systems,” in Proc. IEEE SPAWC , Surrey, UK, Jul. 2025, pp. 1–5
2025
-
[23]
Modeling and performance an alysis for movable antenna enabled wireless communications,
L. Zhu, W. Ma, and R. Zhang, “Modeling and performance an alysis for movable antenna enabled wireless communications,” IEEE Trans. Wireless Commun., vol. 23, no. 6, pp. 6234–6250, 2024
2024
-
[24]
Movable-a ntenna position optimization: A graph-based approach,
W. Mei, X. Wei, B. Ning, Z. Chen, and R. Zhang, “Movable-a ntenna position optimization: A graph-based approach,” IEEE Wireless Commun. Lett., vol. 13, no. 7, pp. 1853–1857, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.