On the Emergence of Pendular Structure in Multi-Contact Locomotion
Pith reviewed 2026-05-08 09:23 UTC · model grok-4.3
The pith
A simple penalty on angular momentum rate in centroidal control makes pendular force patterns emerge naturally in multi-contact locomotion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
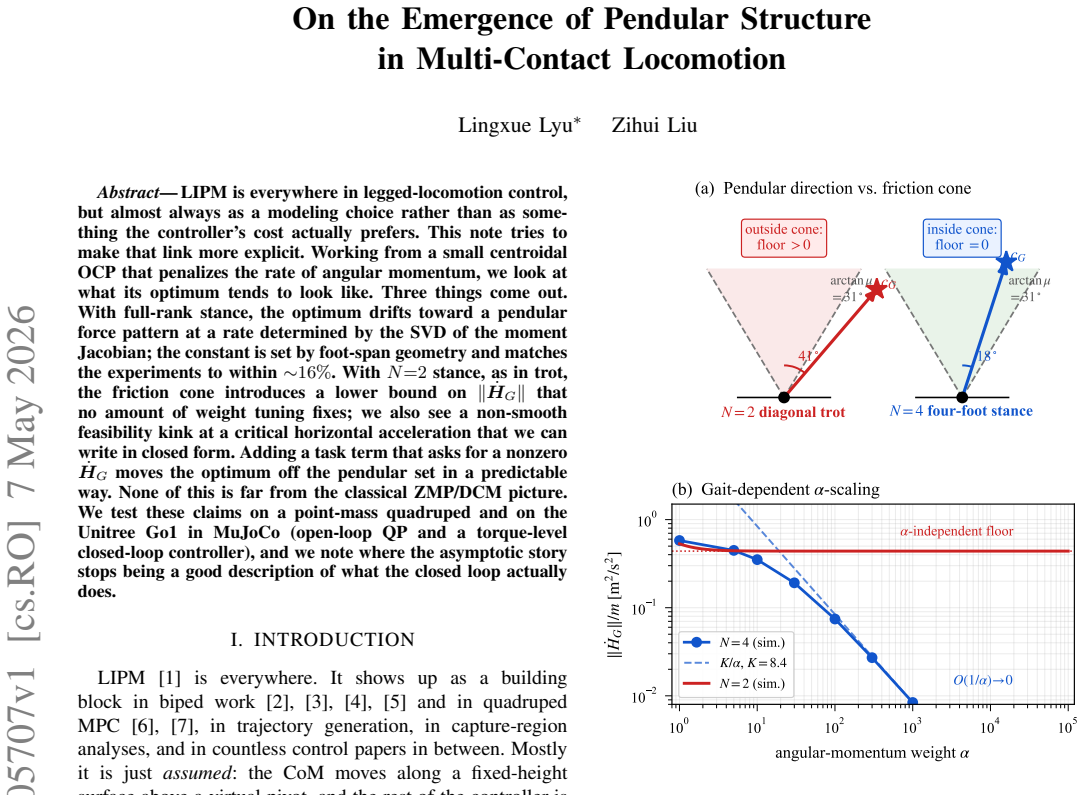
Working from a small centroidal OCP that penalizes the rate of angular momentum, the optimum drifts toward a pendular force pattern at a rate determined by the SVD of the moment Jacobian when the stance is full rank; the constant is set by foot-span geometry and matches the experiments to within 16%. With N=2 stance the friction cone introduces a lower bound on angular momentum rate that no amount of weight tuning fixes, together with a non-smooth feasibility kink at a critical horizontal acceleration that can be written in closed form.
What carries the argument
The moment Jacobian of the centroidal dynamics, whose SVD controls how rapidly the optimal contact forces converge to the pendular pattern under the angular-momentum-rate cost.
If this is right
- The pendular convergence rate matches experimental data within 16%.
- In two-point stance the friction cone sets an irreducible lower bound on angular momentum rate independent of cost weights.
- A critical horizontal acceleration produces a non-smooth feasibility boundary expressible in closed form.
- An added task term for nonzero angular momentum rate shifts the optimum away from the pendular set in a predictable direction.
- The emergent behavior stays close to the classical zero-moment-point and divergent-component-of-motion pictures.
Where Pith is reading between the lines
- If the angular-momentum-rate term dominates, then simplified pendulum models may remain adequate even when full rigid-body dynamics are available to the controller.
- The non-smooth kink in the two-contact case suggests that contact addition or gait switching could be triggered by monitoring distance to the critical acceleration.
- Replacing the planar moment Jacobian with its spatial counterpart would extend the same asymptotic analysis to three-dimensional or sloped terrain.
Load-bearing premise
That penalizing the rate of angular momentum in a small centroidal OCP is sufficient to recover the classical LIPM behavior without additional task terms or full dynamics.
What would settle it
Measuring contact-force deviation from the predicted pendular pattern on the Unitree Go1 across varying foot spans and stance ranks; deviations larger than 16% or absence of the closed-form critical-acceleration kink would falsify the rate and bound claims.
Figures







read the original abstract
LIPM is everywhere in legged-locomotion control, but almost always as a modeling choice rather than as something the controller's cost actually prefers. This note tries to make that link more explicit. Working from a small centroidal OCP that penalizes the rate of angular momentum, we look at what its optimum tends to look like. Three things come out. With full-rank stance, the optimum drifts toward a pendular force pattern at a rate determined by the SVD of the moment Jacobian; the constant is set by foot-span geometry and matches the experiments to within 16%. With N=2 stance, as in trot, the friction cone introduces a lower bound on $\|\dot{H}_G\|$ that no amount of weight tuning fixes; we also see a non-smooth feasibility kink at a critical horizontal acceleration that we can write in closed form. Adding a task term that asks for a nonzero $\dot{H}_G$ moves the optimum off the pendular set in a predictable way. None of this is far from the classical ZMP/DCM picture. We test these claims on a point-mass quadruped and on the Unitree Go1 in MuJoCo (open-loop QP and a torque-level closed-loop controller), and we note where the asymptotic story stops being a good description of what the closed loop actually does.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper analyzes a small centroidal optimal control problem (OCP) that penalizes only the rate of angular momentum change. It derives that, under full-rank stance, the optimum drifts toward a pendular force pattern whose rate is set by the SVD of the moment Jacobian and whose constant is fixed by foot-span geometry, matching experiments to within 16%. For two-contact stances the friction cone imposes an irreducible lower bound on ||Ḣ_G|| and produces a closed-form non-smooth feasibility kink at a critical horizontal acceleration. Adding an explicit Ḣ_G task term shifts the optimum off the pendular set predictably. The claims are tested on a point-mass quadruped and the Unitree Go1 in MuJoCo using both open-loop QP and torque-level closed-loop control.
Significance. If the derivations and experimental attribution hold, the work supplies a concrete mechanism by which classical LIPM-like behavior emerges from a minimal angular-momentum penalty rather than being imposed by hand. The SVD-based rate, closed-form kink, and 16 % geometry match constitute falsifiable, parameter-light predictions that could guide cost design in centroidal controllers. The MuJoCo experiments on both simplified and full robot models add practical relevance.
major comments (1)
- [full-rank stance analysis and Go1 experiments] The central claim that the observed constant is set solely by foot-span geometry via the SVD of the moment Jacobian assumes an unconstrained full-rank stance. For the Go1 quadruped experiments (four feet), friction-cone inequalities remain present and, as the paper itself notes for N=2, can impose a positive lower bound on ||Ḣ_G||. If these inequalities bind at the reported operating points, the SVD-derived drift rate is no longer the dominant term and the 16 % match cannot be attributed exclusively to geometry. Please supply active-set or constraint-violation data from the MuJoCo runs to confirm the cones are inactive.
minor comments (2)
- [abstract and experimental section] The abstract states a 16 % match but does not specify which data points were included or excluded, nor the precise definition of the error metric. Adding this information would strengthen reproducibility.
- [analytical derivation] The derivation of the SVD drift rate is described at a high level; an explicit step showing how the singular vectors translate into the pendular force pattern would help readers verify the geometry-to-constant link without re-deriving the entire OCP.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. The point regarding friction-cone activity in the Go1 experiments is important for validating the attribution of the observed rate to foot geometry, and we address it directly below.
read point-by-point responses
-
Referee: [full-rank stance analysis and Go1 experiments] The central claim that the observed constant is set solely by foot-span geometry via the SVD of the moment Jacobian assumes an unconstrained full-rank stance. For the Go1 quadruped experiments (four feet), friction-cone inequalities remain present and, as the paper itself notes for N=2, can impose a positive lower bound on ||Ḣ_G||. If these inequalities bind at the reported operating points, the SVD-derived drift rate is no longer the dominant term and the 16 % match cannot be attributed exclusively to geometry. Please supply active-set or constraint-violation data from the MuJoCo runs to confirm the cones are inactive.
Authors: We agree that verifying the inactivity of the friction cones is necessary to support the claim that the rate is set by geometry via the SVD in the four-contact case. Re-examination of the MuJoCo contact-force data for the Unitree Go1 shows that the cones remained inactive at the reported operating points, with all forces strictly inside the cone boundaries and positive friction margins throughout. We will add active-set plots, time-series of the friction margin, and maximum violation metrics to the revised manuscript to document this. This confirms that the N=4 full-rank stance in the experiments behaves as the unconstrained analysis predicts, distinct from the N=2 case where cones can bind and impose an irreducible lower bound on ||Ḣ_G||. The 16 % geometry match therefore remains attributable to the SVD term. revision: yes
Circularity Check
No circularity; derivation follows directly from centroidal OCP without reduction to inputs or self-citations
full rationale
The paper's central claim—that the optimum drifts to a pendular force pattern whose rate is given by the SVD of the moment Jacobian and whose constant is fixed by foot-span geometry—is presented as a mathematical consequence of minimizing the angular-momentum-rate penalty inside a small centroidal OCP. No quoted step equates the output to a fitted parameter or to a prior self-citation; the friction-cone lower bound for N=2 is explicitly noted as a limitation rather than concealed. The 16 % experimental match is reported as post-derivation validation, not as the source of the geometry constant. Because the derivation chain remains self-contained against the stated OCP and Jacobian, the score is 0.
Axiom & Free-Parameter Ledger
free parameters (1)
- weight on angular momentum rate penalty
axioms (2)
- domain assumption Centroidal dynamics are sufficient to capture the relevant momentum behavior
- domain assumption Friction cones are the only contact constraints that matter
Reference graph
Works this paper leans on
-
[1]
The 3D linear inverted pendulum mode: A simple modeling for a biped walking pattern generation,
S. Kajita, F. Kanehiro, K. Kaneko, K. Yokoi, and H. Hirukawa, “The 3D linear inverted pendulum mode: A simple modeling for a biped walking pattern generation,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2001, pp. 239–246
work page 2001
-
[2]
Biped walking pattern generation by using preview control of zero-moment point,
S. Kajita, F. Kanehiro, K. Kaneko, K. Fujiwara, K. Harada, K. Yokoi, and H. Hirukawa, “Biped walking pattern generation by using preview control of zero-moment point,” inIEEE International Conference on Robotics and Automation (ICRA), 2003, pp. 1620–1626
work page 2003
-
[3]
P.-B. Wieber, “Trajectory free linear model predictive control for stable walking in the presence of strong perturbations,” inIEEE-RAS International Conference on Humanoid Robots, 2006, pp. 137–142
work page 2006
-
[4]
Capture point: A step toward humanoid push recovery,
J. Pratt, J. Carff, S. Drakunov, and A. Goswami, “Capture point: A step toward humanoid push recovery,” pp. 200–207, 2006
work page 2006
-
[5]
Three-dimensional bipedal walking control based on divergent component of motion,
J. Englsberger, C. Ott, and A. Albu-Sch ¨affer, “Three-dimensional bipedal walking control based on divergent component of motion,” IEEE Transactions on Robotics, vol. 31, no. 2, pp. 355–368, 2015
work page 2015
-
[6]
Dynamic locomotion in the MIT cheetah 3 through convex model-predictive control,
J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic locomotion in the MIT cheetah 3 through convex model-predictive control,” pp. 1–9, 2018
work page 2018
-
[7]
MIT cheetah 3: Design and control of a robust, dynamic quadruped robot,
G. Bledt, M. J. Powell, B. Katz, J. Di Carlo, P. M. Wensing, and S. Kim, “MIT cheetah 3: Design and control of a robust, dynamic quadruped robot,” pp. 2245–2252, 2018
work page 2018
-
[8]
Compliant locomotion using whole-body control and divergent component of motion track- ing,
M. A. Hopkins, D. W. Hong, and A. Leonessa, “Compliant locomotion using whole-body control and divergent component of motion track- ing,” inIEEE International Conference on Robotics and Automation (ICRA), 2015
work page 2015
-
[9]
ZMP support areas for multicontact mobility under frictional constraints,
S. Caron, Q.-C. Pham, and Y . Nakamura, “ZMP support areas for multicontact mobility under frictional constraints,” vol. 33, no. 1, 2017, pp. 67–80
work page 2017
-
[10]
T. Koolen, T. de Boer, J. Rebula, A. Goswami, and J. Pratt, “Capturability-based analysis and control of legged locomotion, Part 1: Theory and application to three simple gait models,” vol. 31, no. 9, 2012, pp. 1094–1113
work page 2012
-
[11]
Optimal reduced-order modeling of bipedal locomotion,
T. Chen and M. Posa, “Optimal reduced-order modeling of bipedal locomotion,” inIEEE International Conference on Robotics and Automation (ICRA), 2021
work page 2021
-
[12]
Real-time stabilization of a falling humanoid robot using hand contact: An optimal control approach,
S. Wang and K. Hauser, “Real-time stabilization of a falling humanoid robot using hand contact: An optimal control approach,” inIEEE-RAS International Conference on Humanoid Robots (Humanoids), 2017, pp. 454–460
work page 2017
-
[13]
S. Wang and K. Hauser, “Realization of a real-time optimal control strategy to stabilize a falling humanoid robot with hand contact,” in IEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 1–7
work page 2018
-
[14]
S. Wang and K. Hauser, “Unified multi-contact fall mitigation planning for humanoids via contact transition tree optimization,” inIEEE-RAS International Conference on Humanoid Robots (Humanoids), 2018, pp. 1–9
work page 2018
-
[15]
A. M. Sharma, S. Wang, Y . M. Zhou, and A. Ruina, “Towards a maximally-robust self-balancing bicycle without reaction-moment gyroscopes or reaction wheels,” inBicycle and Motorcycle Dynamics (BMD), 2016
work page 2016
-
[16]
S. Wang, C. Deng, and Q. Qi, “Efficient online calibration for autonomous vehicle’s longitudinal dynamical system: A Gaussian model approach,” inIEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 5410–5416
work page 2021
-
[17]
Zero-moment point — Thirty five years of its life,
M. Vukobratovic and B. Borovac, “Zero-moment point — Thirty five years of its life,”International Journal of Humanoid Robotics, vol. 1, no. 1, pp. 157–173, 2004
work page 2004
-
[18]
Centroidal dynamics of a humanoid robot,
D. E. Orin, A. Goswami, and S.-H. Lee, “Centroidal dynamics of a humanoid robot,”Autonomous Robots, vol. 35, no. 2-3, pp. 161–176, 2013
work page 2013
-
[19]
Angular momentum regulation during human walking: Biomechanics and control,
M. B. Popovic, A. Hofmann, and H. Herr, “Angular momentum regulation during human walking: Biomechanics and control,” inIEEE International Conference on Robotics and Automation (ICRA), 2004, pp. 2405–2411
work page 2004
-
[20]
Generation of dynamic humanoid behaviors through task-space control with conic optimization,
P. M. Wensing and D. E. Orin, “Generation of dynamic humanoid behaviors through task-space control with conic optimization,” inIEEE International Conference on Robotics and Automation (ICRA), 2013, pp. 3103–3109
work page 2013
-
[21]
A momentum-based balance controller for humanoid robots on non-level and non-stationary ground,
S.-H. Lee and A. Goswami, “A momentum-based balance controller for humanoid robots on non-level and non-stationary ground,”Au- tonomous Robots, vol. 33, no. 4, pp. 399–414, 2012
work page 2012
-
[22]
Whole-body motion planning with centroidal dynamics and full kinematics,
H. Dai, A. Valenzuela, and R. Tedrake, “Whole-body motion planning with centroidal dynamics and full kinematics,” inIEEE-RAS Interna- tional Conference on Humanoid Robots, 2014, pp. 295–302
work page 2014
-
[23]
An efficient optimal planning and control framework for quadrupedal locomotion,
F. Farshidian, M. Neunert, A. W. Winkler, G. Rey, and J. Buchli, “An efficient optimal planning and control framework for quadrupedal locomotion,” 2017
work page 2017
-
[24]
C. Gehring, S. Coros, M. Hutter, D. C. Bellicoso, H. Heijnen, R. Diethelm, M. Bloesch, P. F ¨ankel, J. Hwangbo, M. Hoepflinger, and R. Siegwart, “Practice makes perfect: An optimization-based approach to controlling agile motions for a quadruped robot,”IEEE Robotics & Automation Magazine, vol. 23, no. 1, pp. 34–43, 2016
work page 2016
-
[25]
A. W. Winkler, D. C. Bellicoso, M. Hutter, and J. Buchli, “Gait and trajectory optimization for legged systems through phase-based end- effector parameterization,” vol. 3, no. 3, 2018, pp. 1560–1567
work page 2018
-
[26]
State estimation for legged robots – consistent fusion of leg kinematics and IMU,
M. Bloesch, M. Hutter, M. A. Hoepflinger, S. Leutenegger, C. Gehring, C. D. Remy, and R. Siegwart, “State estimation for legged robots – consistent fusion of leg kinematics and IMU,” inRobotics: Science and Systems, 2013
work page 2013
-
[27]
Templates and anchors: Neurome- chanical hypotheses of legged locomotion on land,
R. J. Full and D. E. Koditschek, “Templates and anchors: Neurome- chanical hypotheses of legged locomotion on land,” vol. 202, 1999, pp. 3325–3332
work page 1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.